プロジェクトの構築手順
以下では、簡単なワーク認識プロジェクトを例に、プロジェクトの構築手順について説明します。
プロジェクトの構造
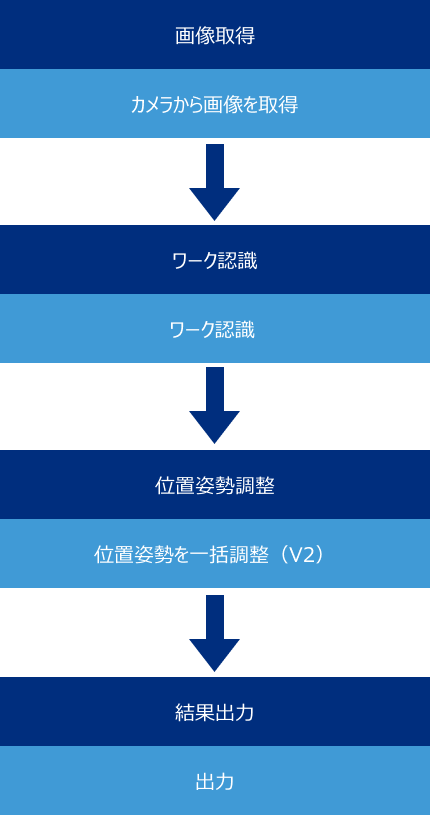
ワーク認識は通常、画像取得、ワーク認識、位置姿勢調整、結果出力という4つの手順から構成されます。それぞれ カメラから画像を取得、ワーク認識、位置姿勢を一括調整(V2)、出力 ステップに対応します。
プロジェクトの構築
ソリューションを新規作成して保存
詳細については、ソリューションを新規作成して保存 をご参照ください。
ステップを追加して接続
ソリューションを作成した後、ステップを追加して接続し、プロジェクトを構築します。
-
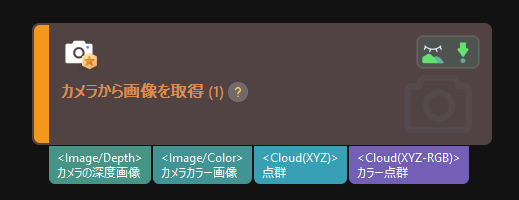
「カメラから画像を取得」ステップを追加します。
このステップはカメラで撮影をトリガーし、ワークの画像データを取得します。このデータは後続のワーク認識に使用されます。
-
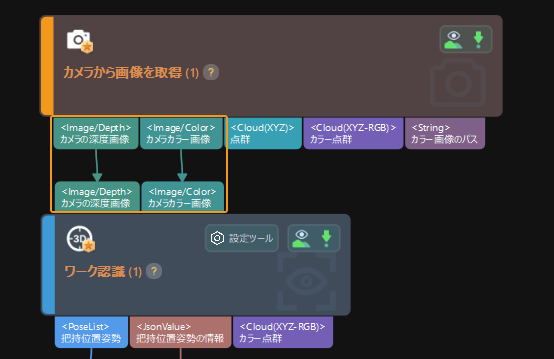
「ワーク認識」ステップを追加します。
このステップには、点群前処理、3Dマッチング、積み重ねられた対象物の除去に対応可能なビジョン処理機能が内蔵されています。これにより、ワークを迅速に認識することを実現します。
このステップを「カメラから画像を取得」ステップの下に配置し、両ステップの「カメラの深度画像」と「カメラカラー画像」ポートを相互接続します。下図に示すように、これで「ワーク認識」ステップの追加と必要なデータの入力が完了します。
-
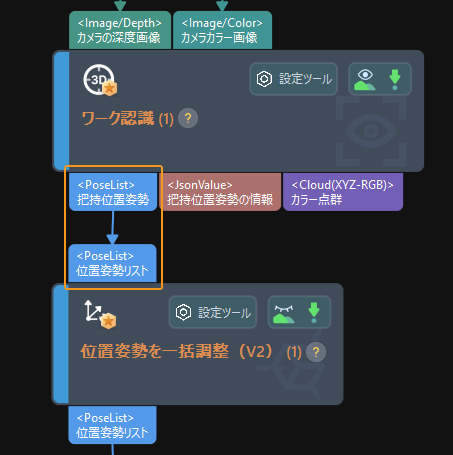
「位置姿勢を一括調整(V2)」を追加します。
このステップでは、「ワーク認識」ステップで出力された位置姿勢の調整(座標系の変換、平行移動、回転、ソートなど)を行います。
このステップを「ワーク認識」ステップの下に配置し、両ステップの「把持位置姿勢」と「位置姿勢リスト」ポートを相互接続します。
-
「出力」ステップを追加します。
このステップでは、現在のプロジェクトのビジョン結果をMech-Vizまたは通信コンポーネントに送信し、後続の把持タスクに使用します。
「出力」ステップはデフォルトで経路計画の関連ポートを表示します。このプロジェクトではワークの把持位置姿勢の関連データを出力する必要があるため、ステップパラメータで ポートタイプ を 事前定義済み(ビジョン結果) に変更する必要があります。
ステップパラメータの調整が完了したら、「出力」ステップを「位置姿勢を一括調整(V2)」ステップの下に配置し、両ステップの「位置姿勢リスト」と「対象物中心点」ポートを相互接続します。また、「ワーク認識」ステップの「把持位置姿勢の情報」出力ポートと「カメラから画像を取得」ステップの「カラー点群」出力ポートを「出力」ステップに接続します。
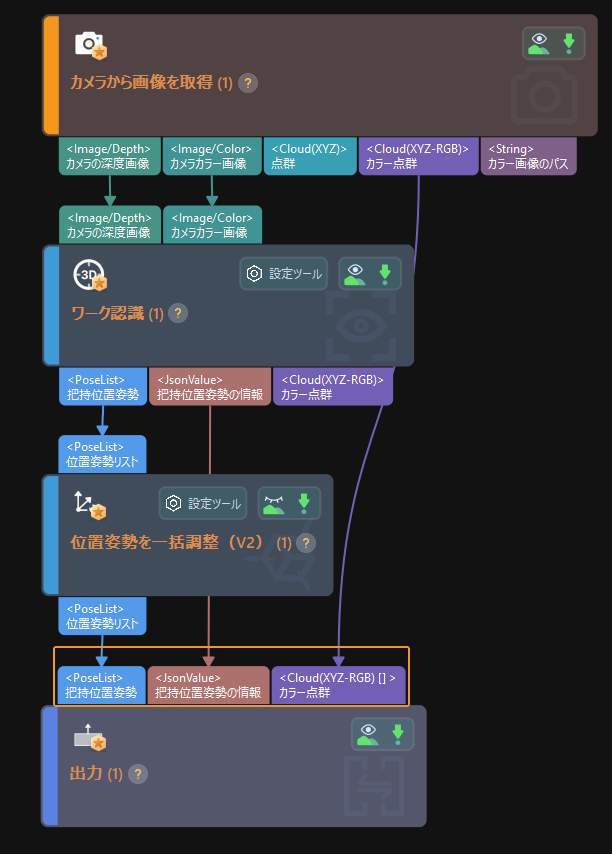
これでワーク認識プロジェクトの構築が完了しました。メニューバーでをクリックするか、ショートカットキーCtrl + Sを押してプロジェクトを保存することができます。
|
ステップが追加された後、データ転送関係をより直感的にするために、ステップのレイアウトを調整できます。以下のいずれかの方法を使用します。
|
プロジェクトの構築が完了したら、プロジェクトを実行してデバッグ することができます。