2Dカメラの内部パラメータをキャリブレーション
Mech-Eye 3Dカメラに対して、外部付け2Dカメラは実際の使用環境でレンズのフォーカスリングを調整して焦点距離を変更する必要があります。この時、2Dカメラの内部パラメータは工場出荷時と比べて大きく変化しているため、2Dカメラを使用する前に内部パラメータおよび外部パラメータのキャリブレーションが必要です。
以下では、外部付け2Dカメラの内部パラメータのキャリブレーション手順について説明します。
事前準備
以下は、ハンド・アイ・キャリブレーションを実行する前に必要な事前準備です。
-
Mech-Mindビジョンシステムを構築します。
-
キャリブレーションに必要なものを準備します。
-
キャリブレーションボードの点群画像生成を調整します。
-
ロボット通信設定を行います。
ビジョンシステムを構築
ビジョンシステムのハードウェア設置 を参照してMech-Mindビジョンシステムの構築を完了させてください。
ハンド・アイ・キャリブレーションを実行するには、Mech-Eye Viewer、Mech-VisionおよびMech-Vizの使用が必要です。これらのソフトウェアがインストールされ、最新バージョンにアップグレードされていることを確認してください。
キャリブレーションに必要なものを準備
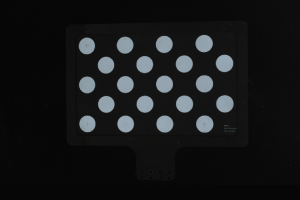
内部パラメータのキャリブレーションにはキャリブレーションボードが必要です。
キャリブレーションボードは以下の要件を満たしていることを確認してください。
-
キャリブレーションボードの白い円がはっきりと見えること、破損や曲げ変形がないことを確認してください。
-
精度の要求が±1mm以上の場合、内部および外部パラメータのキャリブレーションには同じキャリブレーションボードを使用できます。カメラのワーキングディスタンス内で、カメラの視野を最大限にカバーするBDBキャリブレーションボードを選択してください。
キャリブレーションボードの点群画像生成を調整
-
Mech-Eye Viewerを起動し、カメラパラメータを調整します。
-
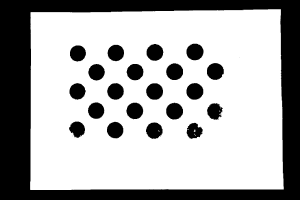
2D画像内のキャリブレーションボードがはっきり見え、露出過度や露出不足がないように、2Dパラメータを調整します。
-
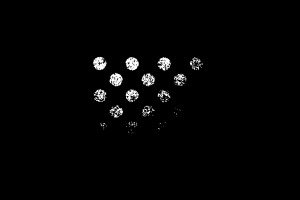
3Dパラメータを調整して、キャリブレーションボードの白い円の点群が完全に見られるようにします。点群の変動範囲を小さくするために、点群後処理 の中の 表面平滑化 と ノイズ除去 を Normal に設定することを推奨します。
現場では、環境光が複雑な場合、2D画像や点群への影響を軽減するために、遮光・補光することを推奨します。
-
上記の手順を完了することで、キャリブレーションボードの点群の画像品質が要件を満たしていることを確認します。
正常 露出過度 露出不足 2D画像

点群
キャリブレーション前の設定
-
Mech-Visionを起動し、ツールバーの カメラキャリブレーション をクリックします。すると、キャリブレーション前の設定 画面が表示されます。
-
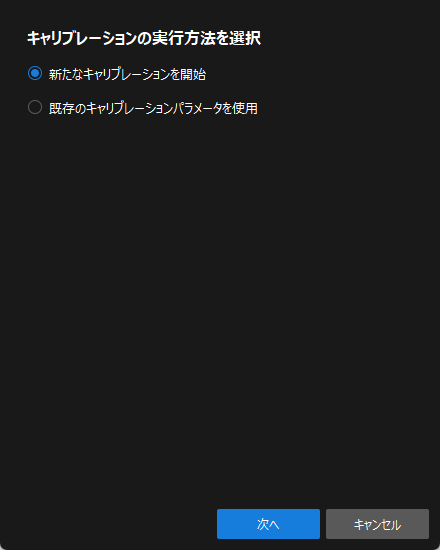
キャリブレーションの実行方法を選択 画面で、新なキャリブレーションを開始 を選択し、次へ をクリックします。
-
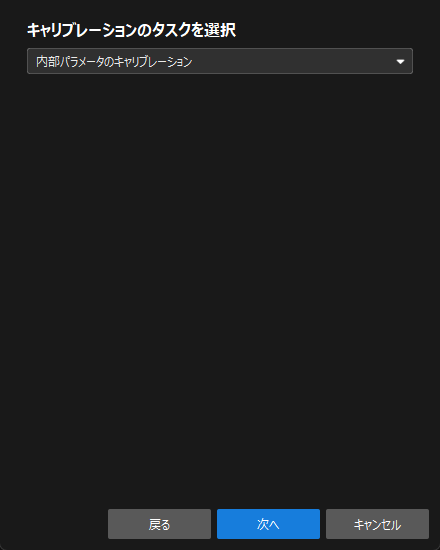
キャリブレーションのタスクを選択 画面で、ドロップダウンリストボックスから 内部パラメータのキャリブレーション を選択し、次へ をクリックします。
-
カメラタイプと操作モードを選択 画面で、カメラの視野関係を選択 を 2D画像と深度画像が同じ視野、キャリブレーションモードを選択 を 標準モード に設定し、実行 をクリックします。すると、キャリブレーション(内部パラメータ) 画面が表示されます。
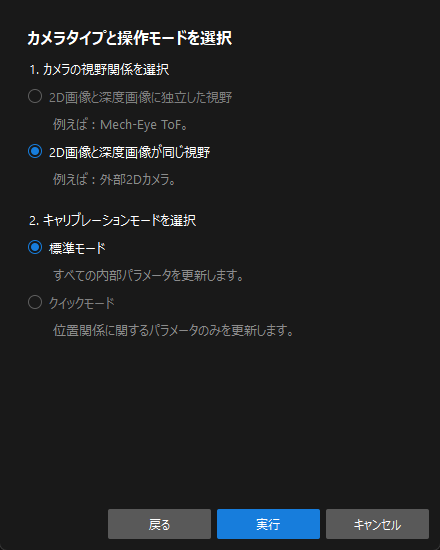
これで、キャリブレーション前の設定が完了し、キャリブレーションに進むことになります。
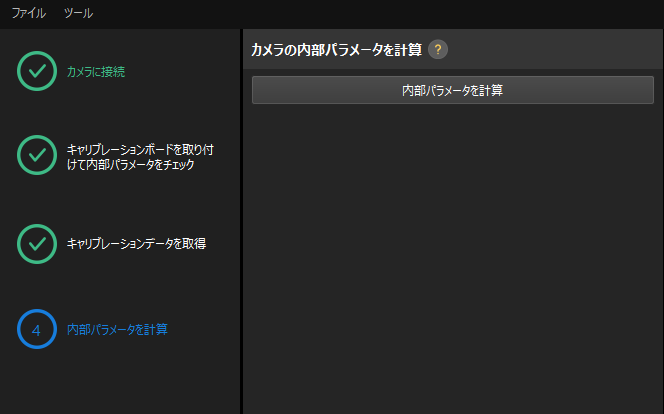
キャリブレーションの実行手順
カメラに接続
-
カメラに接続 手順で、カメラ一覧から接続する2Dカメラを選択して
 をクリックするか、ダブルクリックして接続します。
をクリックするか、ダブルクリックして接続します。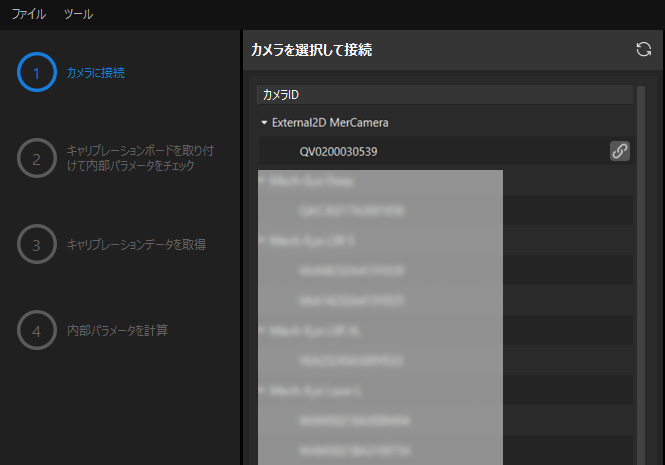
-
カメラ接続後、一回キャプチャ または 連続キャプチャ をクリックします。

-
画像ビュー パネルでは、カメラが画像を正常に取得できることを確認した上で 次へ をクリックします。
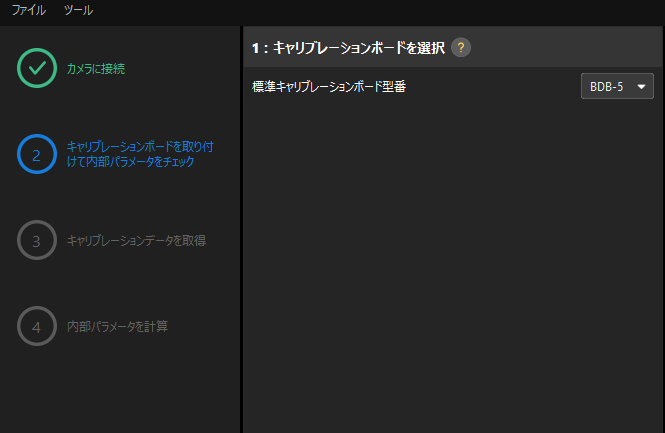
キャリブレーションボードを取り付けて内部パラメータをチェック
-
キャリブレーションボードを取り付けて内部パラメータをチェック 手順で、使用されているキャリブレーションボードに貼られているラベルに従って、キャリブレーションボードを選択 の下の 標準キャリブレーションボード型番 を選択します。
-
画像ビュー で、キャリブレーションボードがカメラ視野内にあることを確認します。
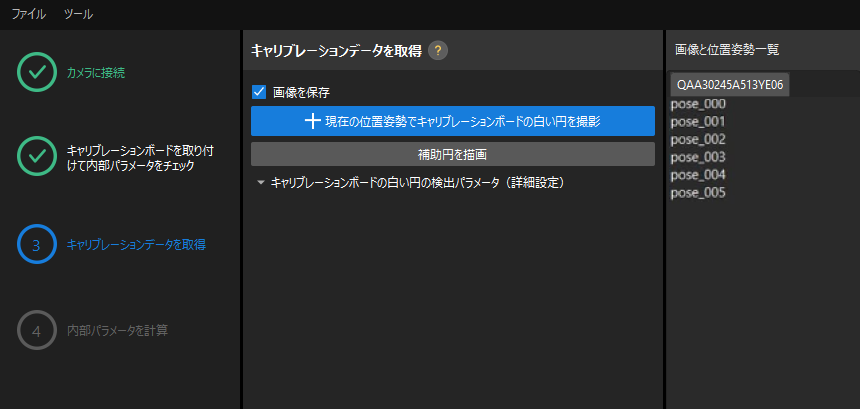
キャリブレーションデータを取得
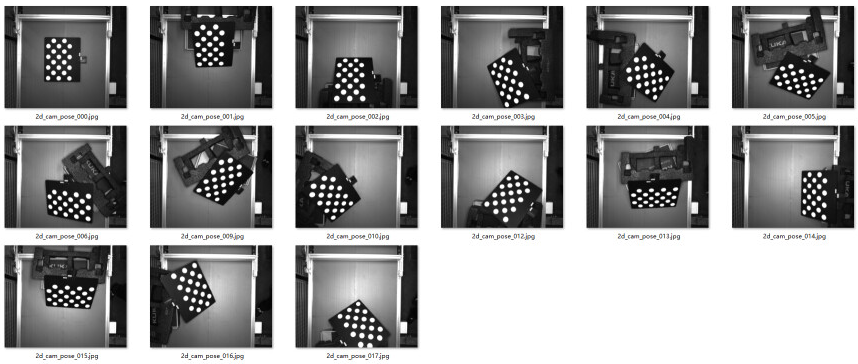
キャリブレーションデータを取得 手順で、現在の位置姿勢でキャリブレーションボードの白い円を撮影 をクリックしてキャリブレーションボードの画像を取得し、次へ をクリックします。
|
キャリブレーションデータを取得する際には、キャリブレーションボードの位置姿勢を変更し続ける必要があります。具体的な要求は以下の通りです。
|