対象物の回転対称性
本節では、対象物の回転対称性について説明します。
概要
| 本節での「対称性」とは「回転対称性」を指します。 |
回転対称とは、2 次元図形を一つの点を中心に回転させた場合に元の図形に完全に重なり合うことです。 対称性がある対象物に対し、対象物の対称性パラメータを設定することができます。 対象物の対称性を利用すると、ロボットが把持や配置を実行するときに発生するロボットハンドの回転を低減し、把持計画の成功率を向上させることが可能です。これによって、ロボットがさらにスムーズに動作します。
対称性のタイプ
回転対称軸を確認する
マッチングモデル・把持位置姿勢エディタで設定した幾何学的中心点の軸を回転対称軸とします。 回転対称軸は一つだけではありません。対象物の配置方式やロボットハンドの種類などによって、Mech-Vision で設定された対象物の幾何学的中心点は異なるので対称軸も異なります。
以下では一般的な対象物の対称タイプを示します。 対象物の対称タイプについては、マッチングモデル・把持位置姿勢エディタを参考して幾何学的中心点と把持点の設定を確認してください。

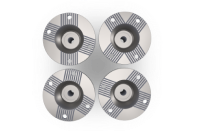





対称回数
対象物を対称軸を中心に a° 回転させた後元の図形に完全に重なり合う時、対象物の対称回数は N = 360°/a° です。
例えば、一般的な段ボール箱の対称回数(N)は 2 で、三角柱の対称回数(N)は 3 で、円柱の対称回数(N)は無限大(円対称)です。
 |
 |
 |
 |
|---|---|---|---|
N = 2 |
N = 4 |
N = 9 |
円対称 |
