ソリューションの設計
以下では、ドリフト自動補正ソリューションを手動で導入する際の「使用前提条件」、「ソリューションの選択」、「キャリブレーションボールの設置方法と移動経路点の設定」、および「キャリブレーションボールの型番選択」について説明します。
ソリューション使用の前提条件
ソリューションの補正効果を保証するためには、ロボットの優れた 繰り返し精度 が不可欠です。このソリューションを使用する前に、ロボットの繰り返し精度を確認する必要があります。
繰り返し位置決め誤差が一定のしきい値を超える場合(例:XYZ軸方向で0.1mm以上)、補正効果が低下し、場合によっては補正後の誤差が増大することがあります。このような場合は、まず ロボットの繰り返し精度を改善 するか、精度要件を満たすロボットに交換 する必要があります。
主要メーカーのロボットは通常、高い繰り返し精度を備えているため、ドリフト自動補正ソリューションをより効果的に活用できます。
ソリューションの選択
ソリューションの分類
カメラの取り付け方式に応じて、キャリブレーションボールの設置場所が異なります。
-
カメラが EIH方式 で取り付けられている場合、キャリブレーションボールはカメラの視野内にある 地面またはブラケット に取り付けられます。
-
カメラが ETH方式 で取り付けられている場合、キャリブレーションボールは ロボット に取り付けられ、ロボットがキャリブレーションボールを動かします。
そのため、キャリブレーションボールの設置方法に基づき、ドリフト自動補正ソリューションは、EIHドリフト自動補正 と ETHドリフト自動補正 に分類されます。
ソリューションを選択
異なる適用シーンに対応するため、5つのドリフト自動補正ソリューションが用意されており、最適なドリフト自動補正効果を実現します。
EIHドリフト自動補正
EIHドリフト補正は、1つのカメラ/2台カメラ に応じて以下の2つのソリューションに分類されます。
| 適用シーン | ソリューション |
|---|---|
1つのカメラのみを使用する場合 |
|
2台カメラを使用する場合 |
ETHドリフト自動補正
ETHドリフト自動補正を行う際には、移動経路点の到達可能性 と ワークがカメラ視野を占める割合 を考慮する必要があります。
-
移動経路点の到達可能性:ドリフト自動補正ソリューションを使用する際、ロボットは通常、キャリブレーションボールを動かしてすべての経路点に移動します。しかし、機械構造の制限(ロボットハンドとコンテナ底面の衝突など)により、ロボットは低い層のワークに近づけない場合があります(高さ差が200mm以内)。そのため、移動経路点の到達可能性に基づいて、ETHドリフト自動補正ソリューションは「全ての経路点が到達可能」と「到達できない移動経路点がある」に分けられます。
-
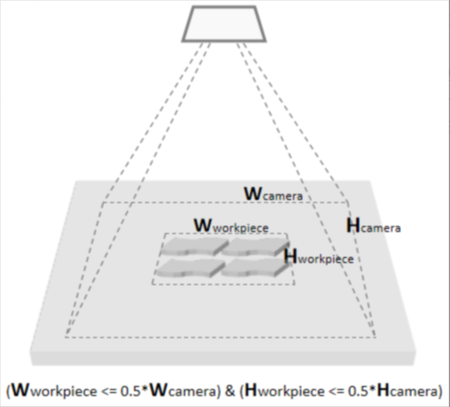
ワークがカメラ視野を占める割合:ドリフト自動補正の過程において、コンテナ内のワークの点群がカメラの水平視野に占める割合が半分以下の場合、移動経路点を少なく設定して作業を軽減できます。一方、占める割合が半分以上の場合、より精密な移動経路点設定が必要です。そのため、ワーク点群がカメラの視野内で占める割合に応じて、ETHドリフト自動補正ソリューションは「ワーク点群がカメラ視野内で半分以下を占める」と「ワーク点群がカメラ視野内で半分以上を占める」に分けられます。
そのため、ETHドリフト自動補正には3つのソリューションが含まれています。下表を参考にして、適切なドリフト自動補正ソリューションを選択してください。
| 適用シーン | ソリューション | その他の説明 | |
|---|---|---|---|
到達できない移動経路点が存在する場合 |
一部の移動経路点に到達できないため、ドリフト自動補正ソリューションを「拡張」して使用し、到達不可能な位置に対するドリフト自動補正効果を確保します。 |
||
すべての移動経路点が到達できる場合 |
コンテナ内の全てのワークの点群がカメラの水平視野で占める割合が半分以上の場合 |
標準のキャリブレーションボールの移動経路点設定を使用します。 |
|
コンテナ内の全てのワークの点群がカメラの水平視野で占める割合が半分以下の場合 |
簡略化されたキャリブレーションボールの移動経路点設定を使用します。 |
||
キャリブレーションボールの設置方法と移動経路点の設定
EIH_1つのカメラ
-
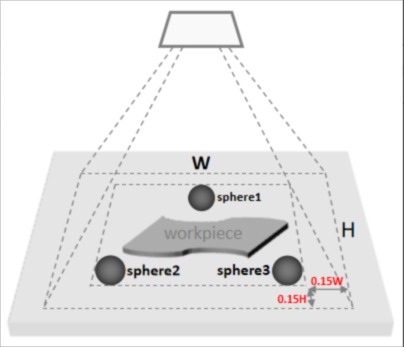
キャリブレーションボールの設置方法:ロボット周囲の空きスペースで、3つのキャリブレーションボールをカメラの視野内の地面またはブラケットに設置します。
-
キャリブレーションボールの移動経路点の設定:キャリブレーションボール2とキャリブレーションボール3の位置を結ぶ線は、カメラの基線方向(カメラの長辺方向)とほぼ平行です。3つのキャリブレーションボールを結ぶ線が形成する形状は、ほぼ二等辺三角形となり、各ボールからカメラ視野の境界までの距離は、カメラ視野のサイズの約0.15倍です。
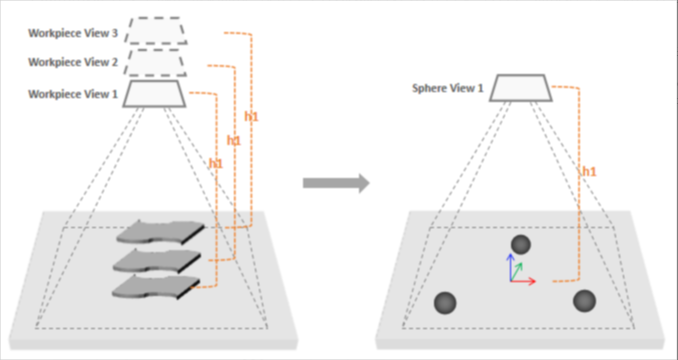
ワークが複数層ある場合、キャリブレーションボールを複数の経路点で撮影する必要がある場合があります。撮影経路点の数はワークとカメラの距離によって異なり、主に以下の2つのパターンに分かれます。
-
パターン1:各層のワークにそれぞれの撮影経路点があり、各層のワークとカメラの距離がすべて約h1の場合。この場合、1つの撮影経路点が必要で、カメラとキャリブレーションボールの距離はh1になります。
-
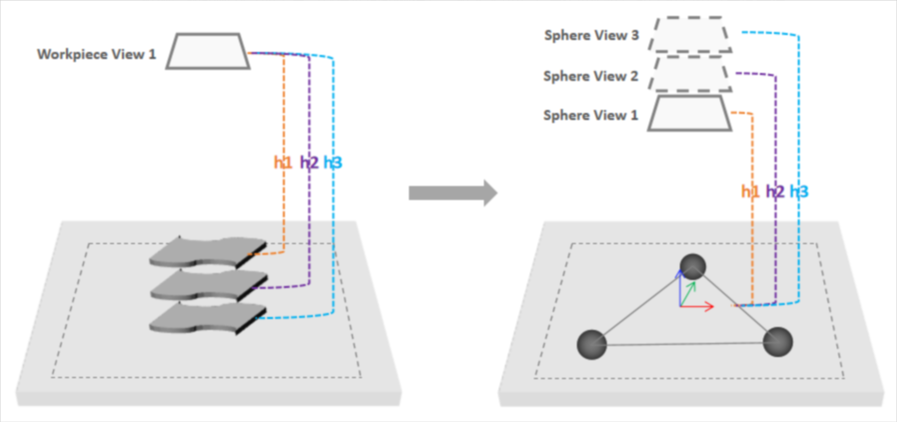
パターン2:各層のワークが1つの撮影経路点を共有し、ワークとカメラの距離がそれぞれh1、h2、h3の場合。この場合、3つの撮影経路点が必要で、カメラとキャリブレーションボールの距離はh1、h2、h3になります。
EIH_2台カメラ_点群結合
キャリブレーションボールの設置方法や移動経路点の設定については、EIH_1つのカメラ と同様ですので、該当部分を参考にして操作を行ってください。
ETH_1つのカメラ_到達できない移動経路点がある
-
キキャリブレーションボールの設置方法:キャリブレーションボールはロボットに取り付けられ、しっかりと固定され、撮影時に遮られないことを確認します。
-
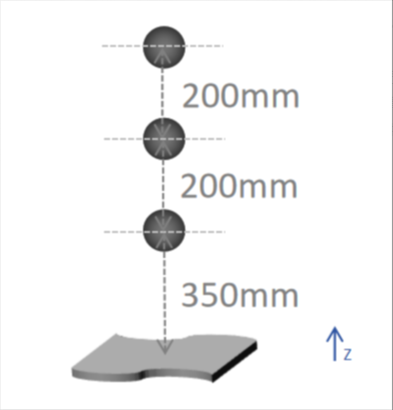
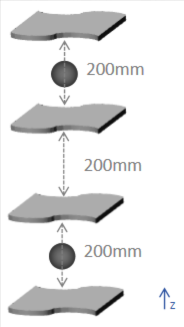
キャリブレーションボールの移動経路点の設定:まず、キャリブレーションボールが到達可能な最も低い位置から最下層のワークまでの距離を測定し、その距離を ZLackDistance とします。この最も低い位置の上に3層以上の移動経路点を設置し、これらの3層のキャリブレーションボールの位置姿勢のデータを使用して到達できないワークの補正情報を推定します。この3層の移動経路点の高さの差は通常、ZLackDistance 以上である必要があります。
例えば、ZLackDistanceが350mm の場合、ZLackDistanceの上方に200mmごとに1層ずつキャリブレーションボールの移動経路点を追加し、最終的に3層の経路点の高さが400mmになります。さらに上にワーク層がある場合は、3層のキャリブレーションボールの移動経路点の上にさらにボール層を追加します。
ZLackDistance が小さく、最も低い位置の上にある全てのワーク層の高さの差も小さい場合、キャリブレーションボールの層間隔を適切に縮小することができます。
例えば、ZLackDistanceが250mm で、最も低い位置の上にある全てのワーク層の高さの差が 300mm の場合、キャリブレーションボールの層間隔を 150mm に縮小できます。
ただし、補正効果を確保するため、どのような場合でもキャリブレーションボールの層間隔は 200mm を超えないようにすることが推奨されます。各層のキャリブレーションボールがカバーする高さが不足している場合は、層を追加してデータ取得範囲を拡大することができます。
下図は、上記のルールに従って各層に9つのキャリブレーションボールの移動経路点を設置した例です。
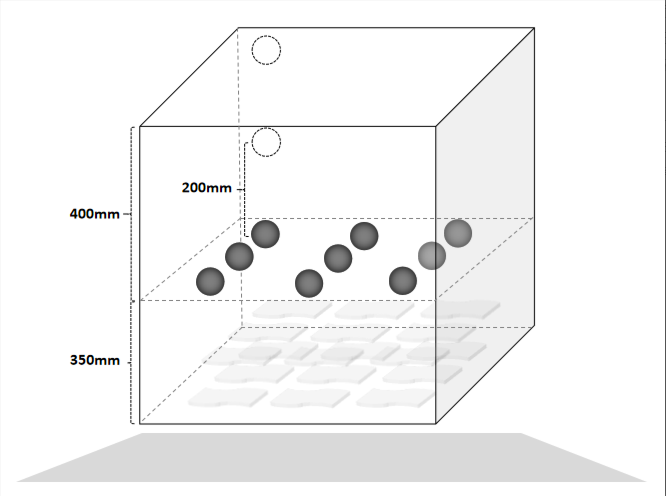
| ロボットはキャリブレーションボールの層の順序に従って、各層の経路点に順次到達する必要があります。 |
ETH_1つのカメラ_全ての移動経路点が到達可能_目標点群がカメラ視野内で半分以上を占める
-
キャリブレーションボールの設置方法:キャリブレーションボールはロボットに取り付けられ、しっかり固定され、撮影時に遮られないことを確認します。
-
キャリブレーションボールの移動経路点の設定:下図は、前述のルールに従って各層に9つのキャリブレーションボールの移動経路点を設置した例です。
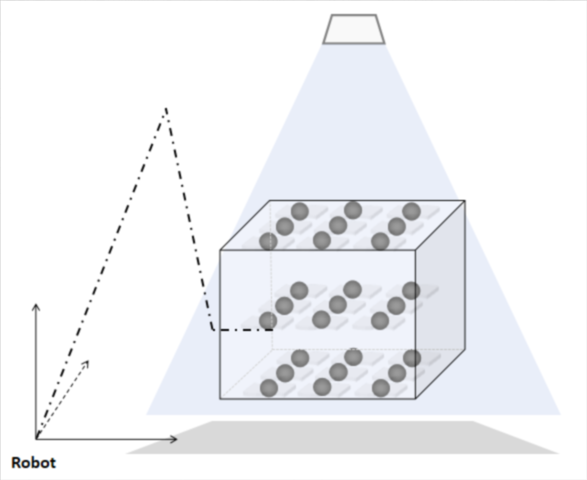
| ロボットはキャリブレーションボールの層の順序に従って、各層の経路点に順次到達する必要があります。 |
ETH_1つのカメラ_全ての移動経路点が到達可能_目標点群がカメラ視野内で半分以下を占める
-
キャリブレーションボールの設置方法:キャリブレーションボールはロボットに取り付けられ、しっかり固定され、撮影時に遮られないことを確認します。
-
キャリブレーションボールの移動経路点の設定:すべての位置におけるワーク点群がカメラの視野内で水平方向の長さと幅に対して約0.5以下を占める場合、各層のワーク領域内でキャリブレーションボールを三角形に配置した3つの経路点を移動させるだけで十分です。
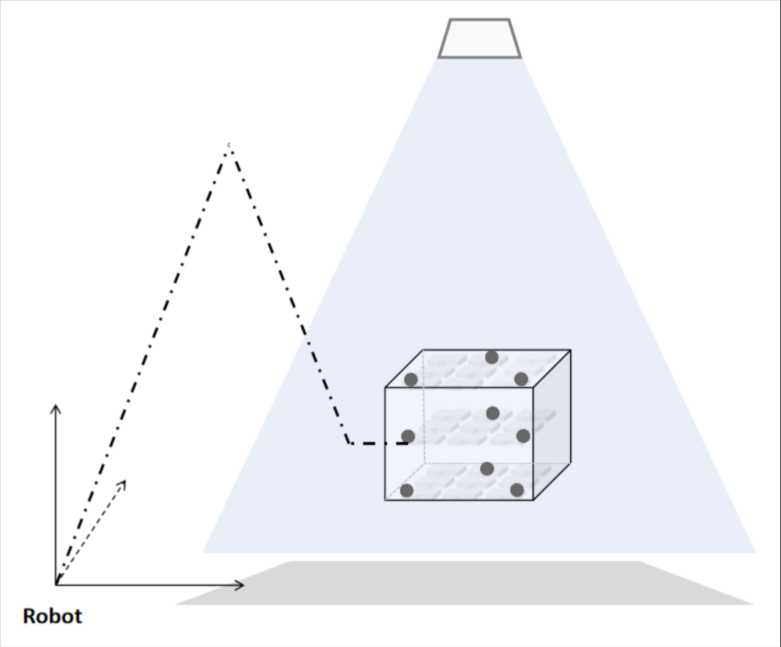
| ロボットはキャリブレーションボールの層の順序に従って、各層の経路点に順次到達する必要があります。 |
その他の注意事項
ワークの層間隔が 200mm以下 の場合、キャリブレーションボールの移動経路点層を共用することが可能です(「ETH__到達できない経路点がある 」の場合を除く)。詳細は下表の通りです。
| ワークの層数が4の場合、2層ごとにキャリブレーションボールの経路点層を共有できます。 | ワークの層数が奇数の場合、最後の層のワークに対応するキャリブレーションボールの経路点層は、そのワーク層の高さと同じになります。 |
|---|---|
|
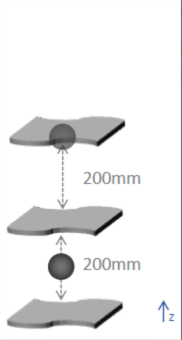
|
キャリブレーションボールの型番選択
-
Mech-Mindが提供する 直径60mm のキャリブレーションボールキットを推奨します。このボールは、カメラのワーキングディスタンスが0.5m~3mの範囲内で使用するのに適しています。
-
カメラのワーキングディスタンスが0.5m~3mを超える場合は、適切なサイズのキャリブレーションボールを評価・選定する必要がありますので、Mech-Mindのテクニカルサポートまでお問い合わせください。
| キャリブレーションボールの取扱説明書については、付録 からご確認ください。 |