ソリューションの概要
以下では、ドリフト自動補正ソリューションの背景や機能について説明します。
問題背景
生産中、以下の問題がロボットの把持に影響を与えることがあります。
-
昼夜の気温差や季節の変わり目による作業環境温度の変化(内部パラメータの変化)が、把持精度の変動を引き起こす可能性があります。
-
衝突によりカメラを交換した際(外部パラメータの変化)には、再キャリブレーションや把持位置姿勢の再ティーチング作業が必要となり、大きな工数がかかます。
-
アラート機能がないため、重大な問題が発生するまで問題が発見されないことがあります。
機能
ドリフト自動補正ソリューションは、「ドリフト補正」、「カメラのクイック交換」、「ドリフト監視」という3つの主要機能を提供し、上記の問題を解決できます。
カメラのクイック交換
カメラを交換した後、配置済みのマーカーを再撮影するだけで、再キャリブレーションやティーチング法による把持位置姿勢追加などの時間を要する操作を行わずに、精度の高い把持が継続可能です。
詳細な操作手順については、こちらをクリックして確認してください。
-
元のカメラを取り外し、新しいカメラを取り付けます。
-
ソリューション導入の 事前準備 でバックアップした元のカメラパラメータを参考にし、新しいカメラのカメラパラメータを調整します。取得したキャリブレーションボールの点群品質が要件を満たすことを確認します。特にボール頂部の点群に抜けがなく、滑らかであることを保証します。
-
カメラから画像を取得 ステップが含まれるキャリブレーションボールやワーク認識プロジェクトでは、新しいカメラに接続するようにステップのパラメータを調整します。
-
ワーク認識プロジェクトでは、元のカメラで使用していた外部パラメータファイル(例:../calibration/KEM0722BA4030007-EyeInHand/extri_param.json)を新しいカメラの対応する場所にコピーします。
-
交換後のカメラの位置が大幅に変わった場合、キャリブレーションボール認識プロジェクトの 3D ROI内の点群を抽出 ステップで3D ROIを調整し、キャリブレーションボールが3D ROI内に含まれるようにします。
-
ソリューション導入で作成したキャリブレーションボールの情報を取得するロボットプログラムを再実行し、キャリブレーションボールの情報を再取得して補正モデルを更新し、ワークの正確な位置決めを行います。
|
ドリフト監視
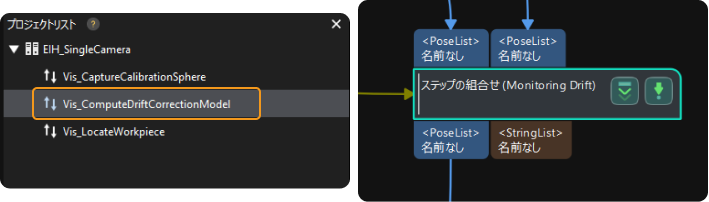
Mech-Visionのサンプルプロジェクト「EIH_SingleCamera - Vis_ComputeDriftCorrectionModel」には、データ監視とアラートのための「ステップの組合せ(Monitoring Drift)」 が事前に追加されています。ビジョンシステムのドリフト状況をリアルタイムで監視し、ドリフトがしきい値を超えるとアラートが発生します。
-
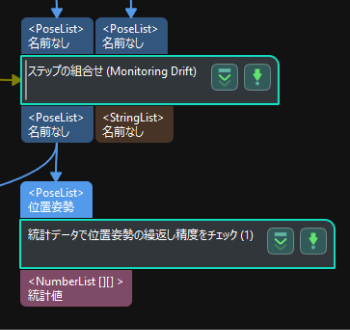
統計データで位置姿勢の繰返し精度をチェック ステップを追加することで、「ステップの組合せ(Monitoring Drift)」で計算された「ドリフト値」を統計することができます。
-
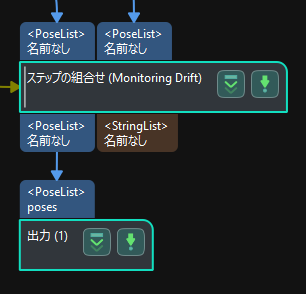
「ステップの組合せ(Monitoring Drift)」で計算された「ドリフト値」と「アラートラベル」を 出力 ステップを通じて外部サービスに送信することも可能です。
ソリューションの説明
全体設計
-
キャリブレーションボールを監視してドリフト情報を取得し、認識対象物の位置姿勢を補正します。
-
ハードウェアの取り付け と ソリューションの導入 は、カメラの取り付け方式(EIH、ETH)に応じて異なる操作フローに分かれています。