Mech-Viz経路を取得
概要
-
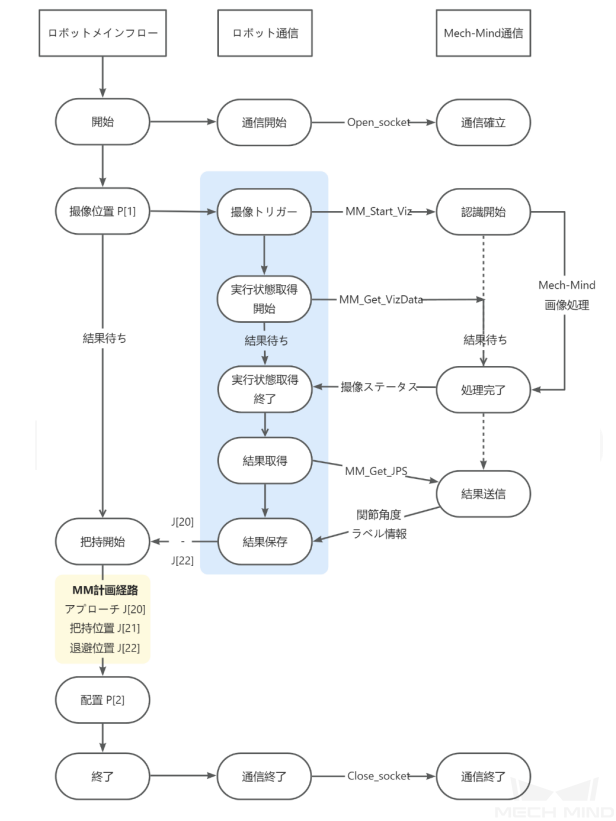
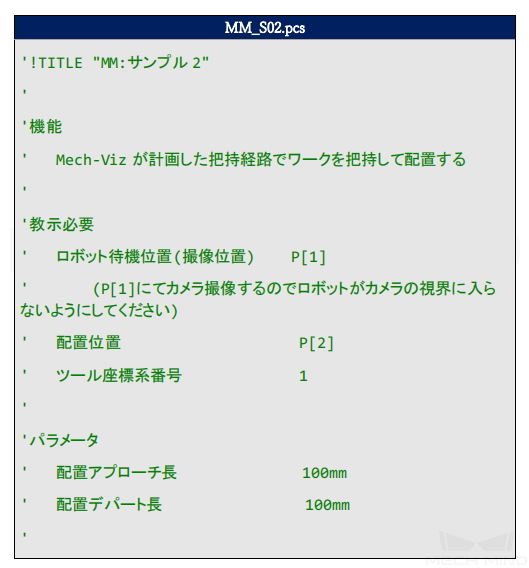
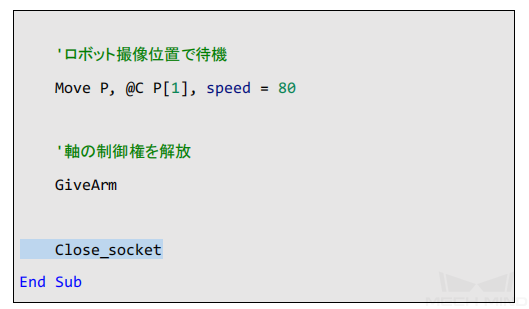
サンプル②「MM_S02」は、Mech-Vizを用いて、撮像と把持、その後に配置、シンプルなアプリケーションを実現しています。
-
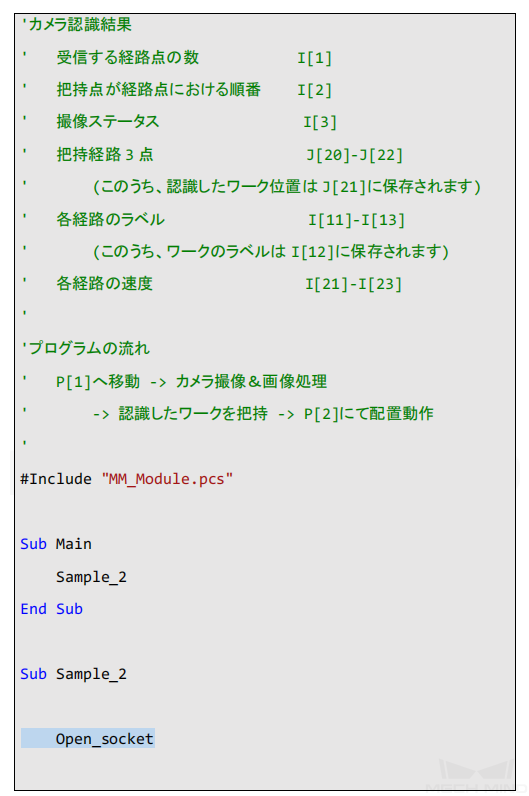
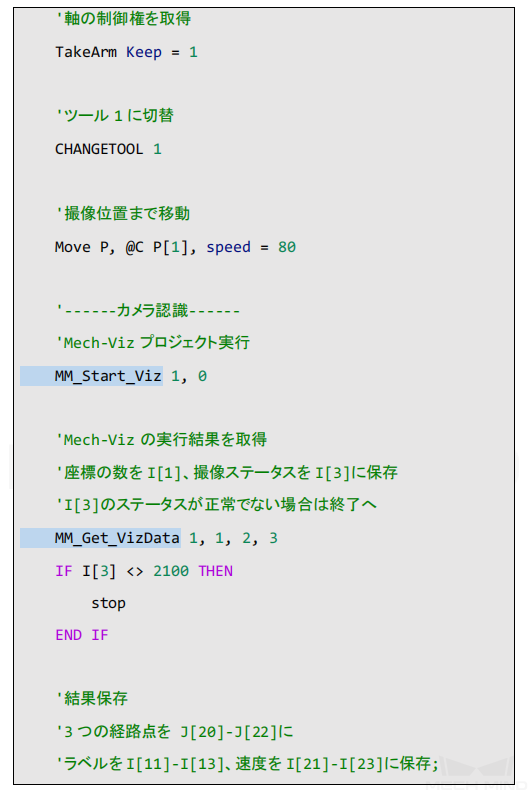
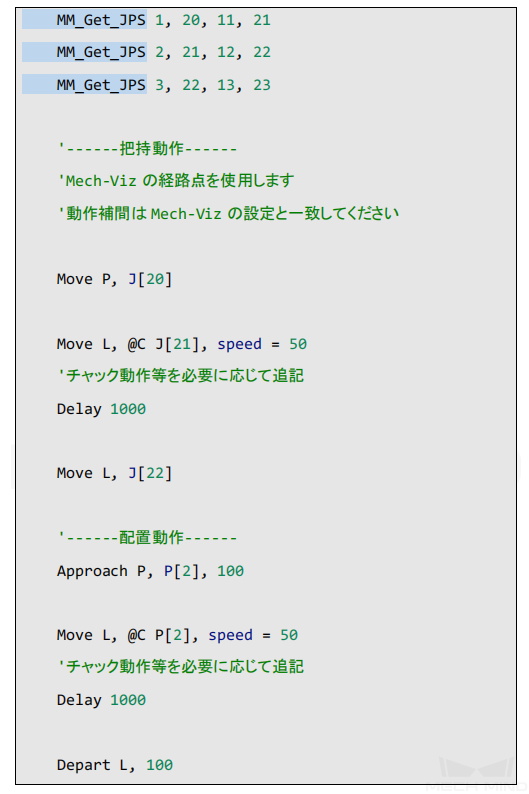
Mech-Vision の 経路計画機能 やMech-Vizから出力される経路よりロボットを動作させる場合、経路点は関節角度・TCP 2 種類で表現ができますが、コマンド「MM_Get_JPS」で関節角度を取得することを推奨します。TCP の場合はロボットコントローラとMech-Vizで形態の選択が異なる場合があり、衝突検出が正しく機能しない可能性があります。