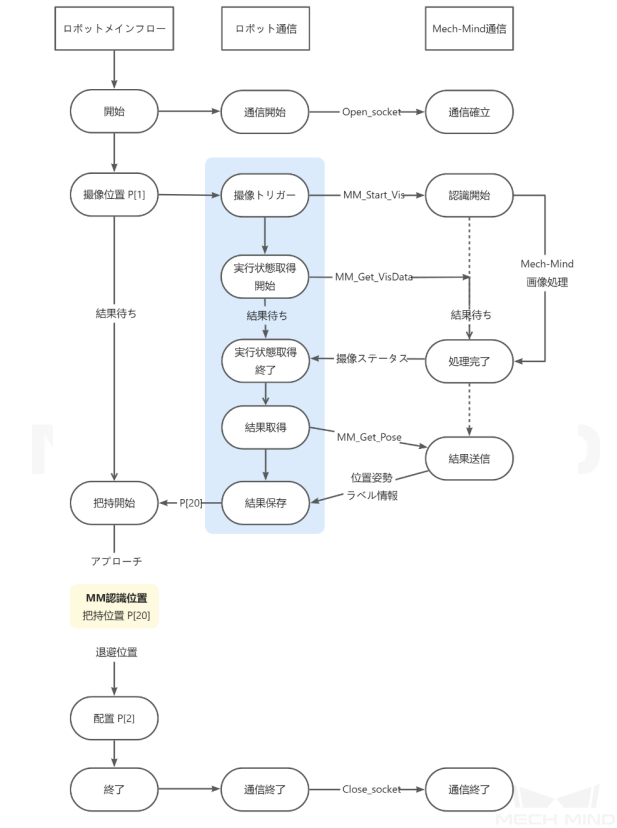
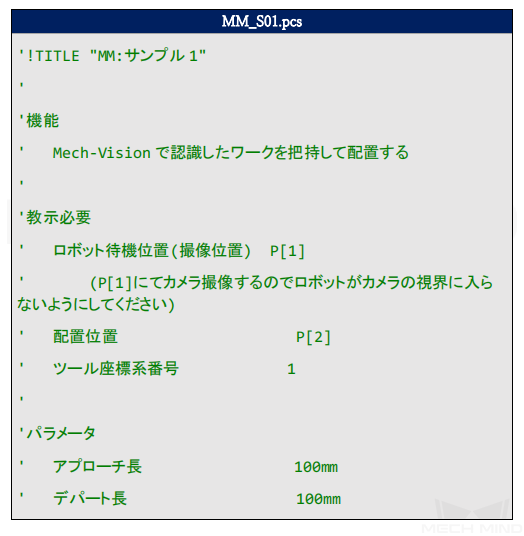
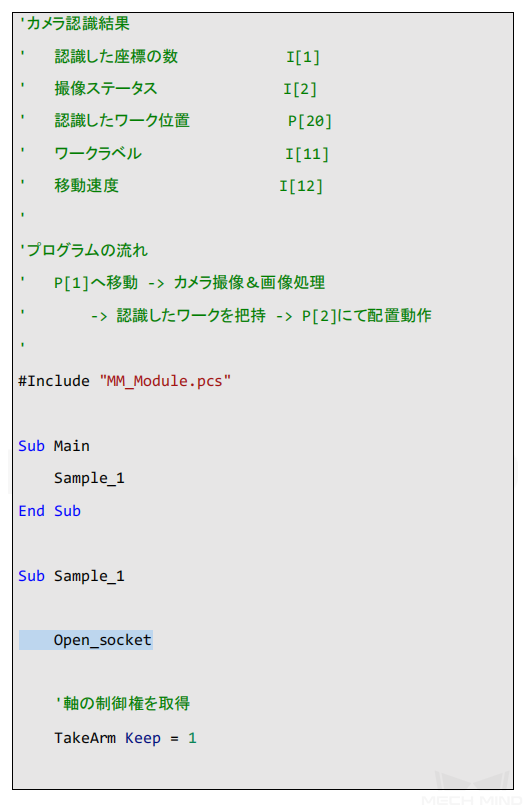
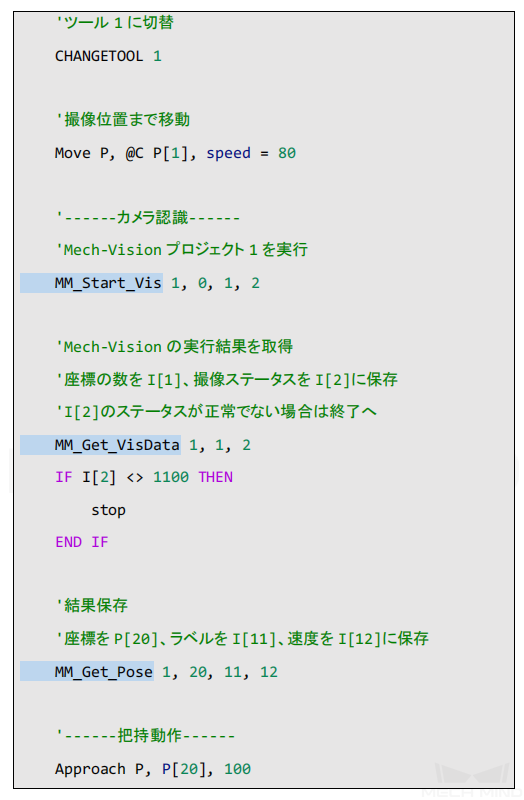
Mech-Vision認識結果を取得 現在ご覧いただいているのは最新版の内容です(V2.2.1)。異なるバージョンを参照する場合は、画面右上のボタンから切り替えが可能です。 ■ ご利用中のバージョンが分からない場合や、サポートが必要な場合はお気軽にサポート窓口までご連絡ください。 概要 サンプル①「MM_S01」は、Mech-Vision の認識結果を元に、撮像と把持、その後に配置、シンプルなアプリケーションを実現しています。 Mech-Vision から出力される位置姿勢について、通常はロボットのベース座標系における対象物の位置と回転角を表します。よって、結果取得の際はコマンド「MM_Get_Pose」で TCP 位置姿勢を取得します。 処理フロー サンプルプログラム この情報は役に立ちましたか? フィードバックを送信 ありがとうございます! ご意見・ご要望がございましたら、以下よりお寄せください: オンラインコミュニティ フィードバックフォーム サンプルプログラム Mech-Viz経路を取得