Mech-Vision からビジョン結果を取得(MM3DVSPVIS.prg)
概要
機能 |
このサンプルプログラムは、Mech-Vision からビジョン結果を受け取り、簡単な把持・配置を行うものです。 |
必要なプロジェクト |
Mech-Visionプロジェクト |
事前準備 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム変数
以下にサンプルプログラムで使用した変数の役割を示しています。
| 変数名 | 説明 |
|---|---|
データに関する変数 |
|
JntSend = (+90.00,+0.00,+90.00,+0.00,+0.00,+0.00) |
ユーザー定義の格納用 J 変数 |
PosSave = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00) |
返信されたデータの保存先となる P 変数(保存先となるため、初期値は 0) |
MM_Status |
ステータスコードの保存先となる変数 |
MM_Result(20, 8) |
取得したビジョンポイントの保存先となる配列 |
Mech-Mind Function 用パラメータ |
|
MM_UserCOM_Num |
通信に使用する COM 番号 |
MM_ProjID |
使用する Mech-Vision のプロジェクト番号 |
MM_ExpVal |
取得されるビジョンポイントまたは経路点の予期数 |
MM_RbtPose |
ロボットの位置姿勢タイプ |
MM_SendPt |
一度に送信する位置姿勢の最大数 |
MM_VisionPt_Num |
取得したビジョンポイントの数 |
MM_Serial |
保存するデータのインデックス番号 |
MM_Label |
ビジョンポイントまたは経路点のラベル |
MM_ToolID |
ビジョンポイントまたは経路点のツール ID |
プログラムファンクション
以下にサンプルライブラリで使用した関数の役割を示しています。各関数の詳細な説明は関数の説明を参照してください。
| 関数名 | 説明 |
|---|---|
通信初期化 |
|
Mech-Vision プロジェクトを実行 |
|
ビジョン結果を取得 |
|
ビジョン結果または計画された経路を保存(位置姿勢形式はツール位置姿勢) |
プログラム解説
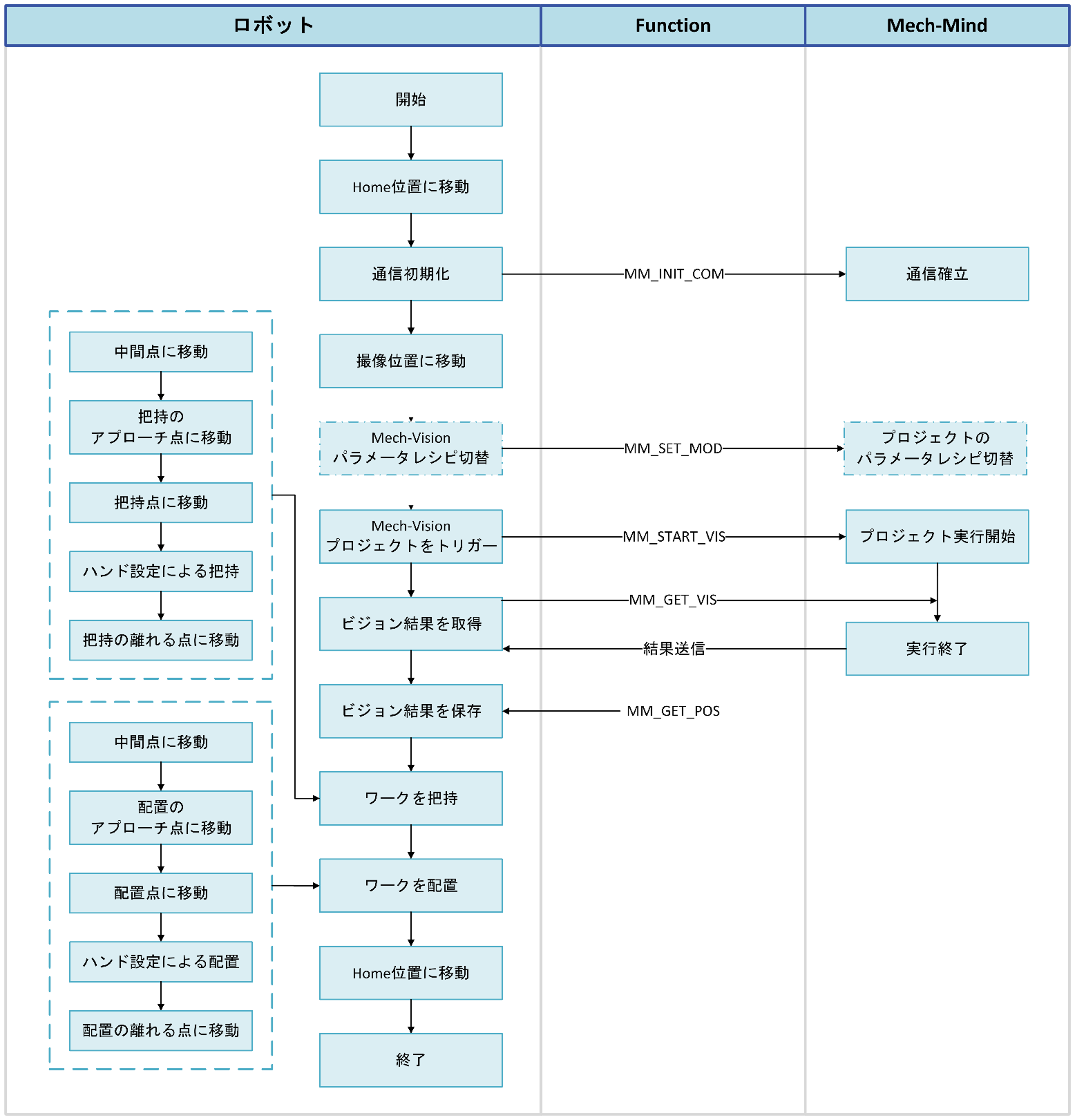
本サンプルプログラムは下図のフローチャートのように処理を行います。
-
各変数を定義します。
-
ロボットの初期位置(Home 位置)に移動させます。
-
MM_INIT_COM で TCP 通信を初期化、TCP 接続を構築します。
-
撮像位置(Trg 位置)に移動させます。
-
MM_START_VIS で Mech-Vision プロジェクトの実行をトリガーします。
-
1 秒待機します。Eye-In-Hand では、撮影が完了するまでロボットが完全に停止している必要があるため、WAIT 命令が必要です。Eye-To-Hand では、MM_START_VIS と MM_GET_VIS の間に移動命令がある場合、この WAIT 命令は必要ありません。
-
MM_GET_VIS を用いて Mech-Vision から処理結果を取得します。
-
返されたステータスコードを確認します。エラーコードが返された場合、プログラムは一時停止します。
-
取得した TCP 位置姿勢データを指定した変数に保存します。
-
ロボットを把持位置に移動させ、把持を行います。
-
ロボットを把持位置と配置位置間の経路に移動させます。
-
設定した配置位置にロボットを移動し、ワークを配置します。
-
ロボットは初期位置(Home 位置)に移動します。