MM_S21_Vis_As_Uframe
プログラム概要
機能 |
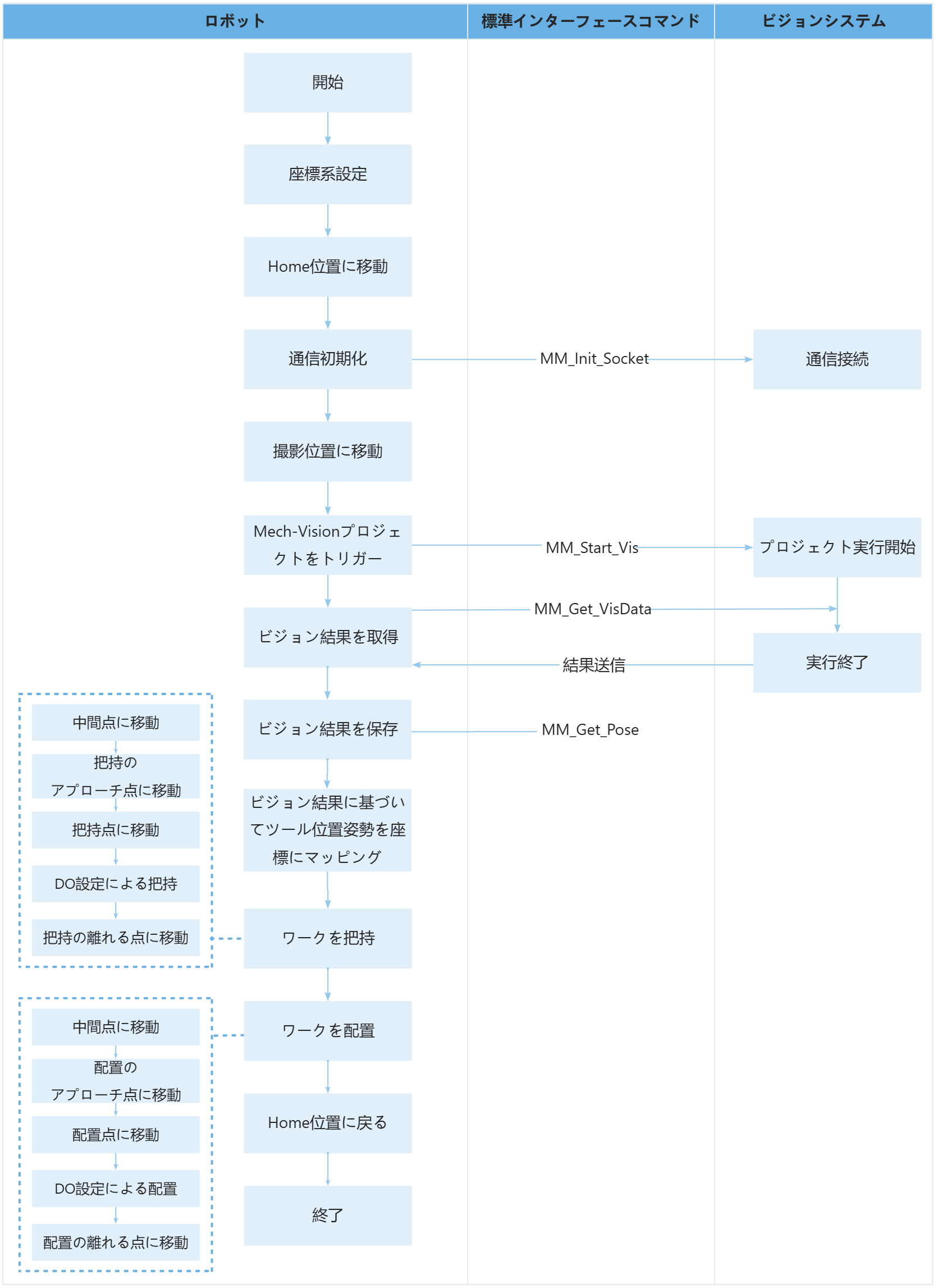
ロボットがMech-Visionプロジェクトを実行してビジョン結果を取得し、ビジョン結果をユーザー座標系として用いて、把持および配置動作のフローを実行します。 |
ファイル場所 |
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある |
必要なプロジェクト |
Mech-Visionプロジェクト |
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
以下はMM_S21_Vis_As_Uframeサンプルプログラムのコードと関連する説明です。
| MM_S1_Vis_Basicサンプルと比較して、このサンプルではビジョン結果をユーザー座標系(ワーク座標系など)として使用し、把持を行います。そのため、MM_S1_Vis_Basicサンプルと同じ部分のコードについては、以下で再度説明することはありません(詳細は MM_S1_Vis_Basicサンプルの説明 をご参照ください)。 |
&ACCESS RVO
&REL 20
&PARAM DISKPATH = KRC:\R1\KUKA_MM\sample
DEF MM_S21_Vis_As_Uframe ( )
;---------------------------------------------------
; FUNCTION: trigger Mech-Vision project and get
; vision result
; Mech-Mind, 2026-12-29
;---------------------------------------------------
;set current tool no. to 1
BAS(#TOOL,1)
;set current base no. to 0
BAS(#BASE,0)
;move to robot home position
;FOLD PTP HOME Vel=100 % DEFAULT;%{PE}%R 8.3.44,%MKUKATPBASIS,%CMOVE,%VPTP,%P 1:PTP, 2:HOME, 3:, 5:100, 7:DEFAULT
$BWDSTART=FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=FHOME
BAS(#PTP_PARAMS,100)
$H_POS=XHOME
PTP XHOME
;ENDFOLD
;initialize communication parameters (initialization is required only once)
MM_Init_Socket("XML_Kuka_MMIND",873,871,60)
;move to image-capturing position
;FOLD LIN camera_capture Vel=1 m/s CPDAT1 Tool[1] Base[0] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=camera_capture; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT4; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT1
FDAT_ACT = Fcamera_capture
BAS(#CP_PARAMS, 1.0)
LIN Xcamera_capture
;ENDFOLD
;trigger NO.1 Mech-Vision project
MM_Start_Vis(1,0,2,init_jps,status)
IF status <> 1102 THEN
;add error handling logic here according to different error codes
MM_LOG("Status ERROR")
HALT
ENDIF
;get vision result from NO.1 Mech-Vision project
MM_Get_VisData(1,pos_num,status)
;check whether vision result has been got from Mech-Vision successfully
IF status<> 1100 THEN
;add error handling logic here according to different error codes
;e.g.: status=1003 means no point cloud in ROI
;e.g.: status=1002 means no vision result
halt
ENDIF
;save first base point data to local variables
MM_Get_Pose(1,XWobjpoint,label,toolid)
;Convert the visual points to the workpiece coordinates
BASE_DATA[10]=XWobjpoint
;calculate pick approach point based on pick point
tool_offset={X 0,Y 0,Z -100,A 0,B 0,C 0}
Xpick_app=Xpick_point:tool_offset
;move to intermediate waypoint of picking
;FOLD PTP pick_waypoint CONT Vel=50 % PDAT1 Tool[1] Base[0];%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=pick_waypoint; Kuka.BlendingEnabled=True; Kuka.MoveDataPtpName=PDAT1; Kuka.VelocityPtp=50; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=PTP
;ENDFOLD
$BWDSTART = FALSE
PDAT_ACT = PPDAT1
FDAT_ACT = Fpick_waypoint
BAS(#PTP_PARAMS, 50.0)
PTP Xpick_waypoint C_Dis
;ENDFOLD
;move to approach waypoint of picking
;FOLD LIN pick_app Vel=1 m/s CPDAT2 Tool[1]:Tool1 Base[10] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=pick_app; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT2; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT2
FDAT_ACT = Fpick_app
BAS(#CP_PARAMS, 1.0)
SET_CD_PARAMS (0)
LIN Xpick_app
;ENDFOLD
;move to picking waypoint
;FOLD LIN pick_point Vel=0.3 m/s CPDAT3 Tool[1]:Tool1 Base[10] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=pick_point; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT3; Kuka.VelocityPath=0.3; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT3
FDAT_ACT = Fpick_point
BAS(#CP_PARAMS, 0.3)
SET_CD_PARAMS (0)
LIN Xpick_point
;ENDFOLD
;add object grasping logic here, such as "$OUT[1]=TRUE"
halt
;move to departure waypoint of picking
;FOLD LIN pick_app Vel=1 m/s CPDAT2 Tool[1]:Tool1 Base[10] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=pick_app; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT2; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT2
FDAT_ACT = Fpick_app
BAS(#CP_PARAMS, 1.0)
SET_CD_PARAMS (0)
LIN Xpick_app
;ENDFOLD
;move to intermediate waypoint of placing
;FOLD PTP drop_waypoint CONT Vel=100 % PDAT2 Tool[1] Base[0];%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=drop_waypoint; Kuka.BlendingEnabled=True; Kuka.MoveDataPtpName=PDAT2; Kuka.VelocityPtp=100; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=PTP
;ENDFOLD
$BWDSTART = FALSE
PDAT_ACT = PPDAT2
FDAT_ACT = Fdrop_waypoint
BAS(#PTP_PARAMS, 100.0)
PTP Xdrop_waypoint C_Dis
;ENDFOLD
;move to approach waypoint of placing
;FOLD LIN drop_app Vel=1 m/s CPDAT4 Tool[1]:Tool1 Base[1] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=drop_app; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT4; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT4
FDAT_ACT = Fdrop_app
BAS(#CP_PARAMS, 1.0)
SET_CD_PARAMS (0)
LIN Xdrop_app
;ENDFOLD
;move to placing waypoint
;FOLD LIN drop Vel=0.3 m/s CPDAT5 Tool[1]:Tool1 Base[1] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=drop; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT5; Kuka.VelocityPath=0.3; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT5
FDAT_ACT = Fdrop
BAS(#CP_PARAMS, 0.3)
SET_CD_PARAMS (0)
LIN Xdrop
;ENDFOLD
;add object releasing logic here, such as "$OUT[1]=FALSE"
halt
;move to departure waypoint of placing
;FOLD LIN drop_app Vel=1 m/s CPDAT4 Tool[1]:Tool1 Base[1] ;%{PE}
;FOLD Parameters ;%{h}
;Params IlfProvider=kukaroboter.basistech.inlineforms.movement.old; Kuka.IsGlobalPoint=False; Kuka.PointName=drop_app; Kuka.BlendingEnabled=False; Kuka.MoveDataName=CPDAT4; Kuka.VelocityPath=1; Kuka.CurrentCDSetIndex=0; Kuka.MovementParameterFieldEnabled=True; IlfCommand=LIN
;ENDFOLD
$BWDSTART = FALSE
LDAT_ACT = LCPDAT4
FDAT_ACT = Fdrop_app
BAS(#CP_PARAMS, 1.0)
LIN Xdrop_app
;ENDFOLD
;move back to robot home position
;FOLD PTP HOME Vel=100 % DEFAULT;%{PE}%R 8.3.44,%MKUKATPBASIS,%CMOVE,%VPTP,%P 1:PTP, 2:HOME, 3:, 5:100, 7:DEFAULT
$BWDSTART=FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=FHOME
BAS(#PTP_PARAMS,100)
$H_POS=XHOME
PTP XHOME
;ENDFOLD
END上記のサンプルプログラムの処理流れは、下図の通りです。
下表は追加されたコードとその説明です。コマンド名のリンクをクリックすることで、その詳細を確認できます。
| 処理流れ | コートと説明 | ||
|---|---|---|---|
ビジョンポイントのツール位置姿勢をユーザー座標系として設定 |
|
||
把持と配置を実行 |
|