標準インターフェースコマンド
以下のように、Mech-Mindビジョンシステムは、ロボット側プログラムに6つの標準インターフェースコマンドコンポネントを提供します。

注意事項
ネットワークデバイス設定
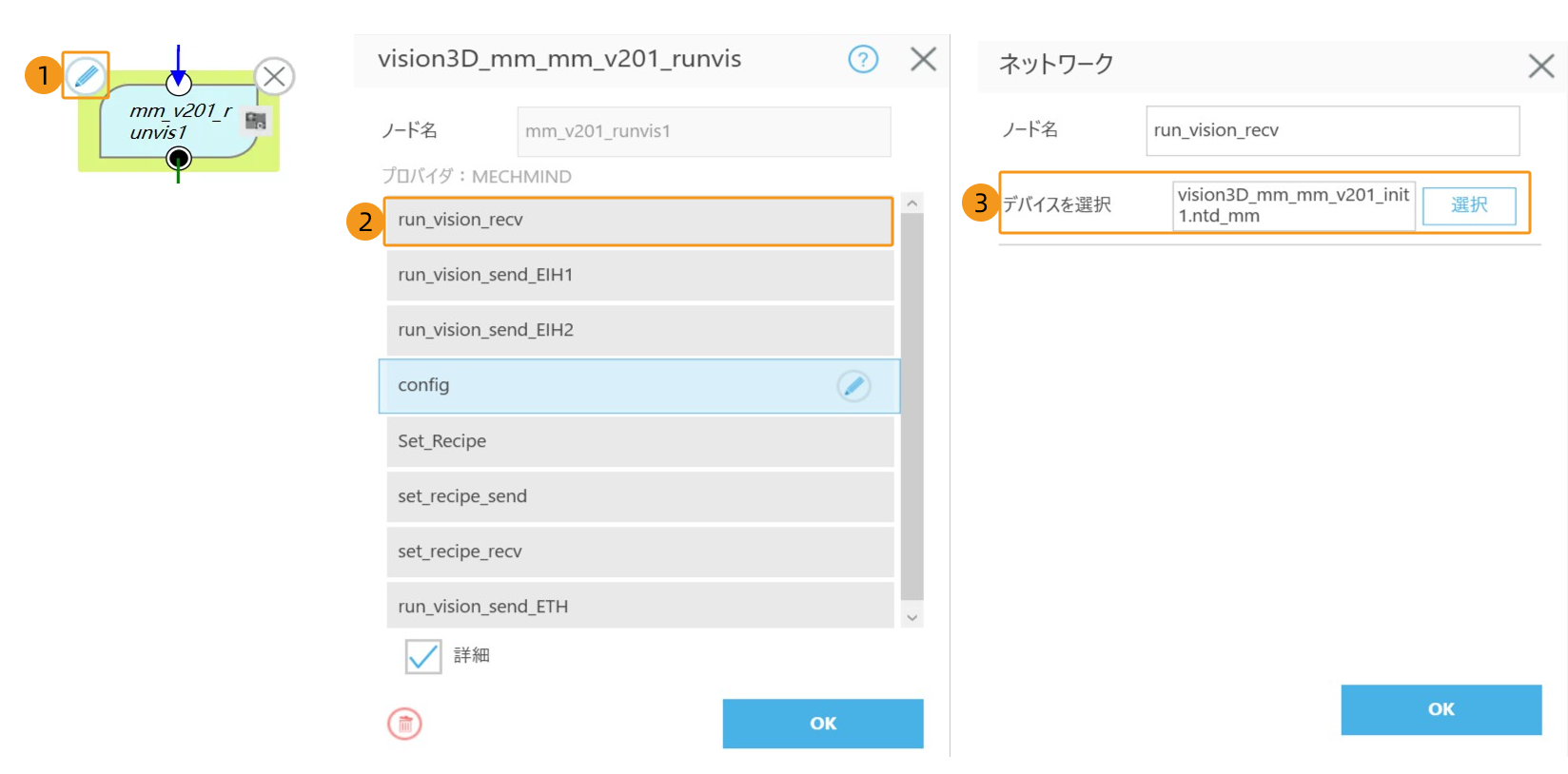
コンポネントのネットワークデバイスを一致させるために、左の Components からドラッグしたコマンドコンポネント(MM initを除く)は、いずれも左上の編集アイコンをクリックし、詳細 にチェックを入れ、send と recv プロパティのあるネットワークデバイスを、MM init によって生成したネットワークデバイスに設定します。
下図のように、Run Visionの run_vision_recv を例としてrun_vision_recvのネットワークデバイス設定方法を説明します。
コンポネントのパラメータ設定変更
コンポネントのコマンドのパラメータ設定を変更する場合、以下のガイドに従ってください。
ここでは「Run Visionコンポネント→ Set_Recipeパラメータグループ→ g_mm_whether_set_recipeパラメータ」を例に、変更の方法を説明します。
-
mm_v201_runvis1 を選択し、左上の編集アイコンをクリックします。
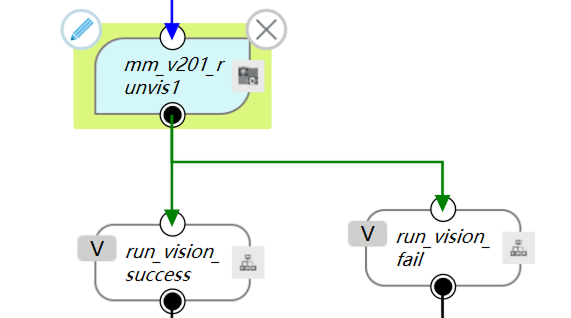
-
Set_Recipe を選択し、編集アイコンをクリックします。

-
選択 をクリックします。

-
g_mm_whether_set_recipe を選択し、編集アイコンをクリックします。
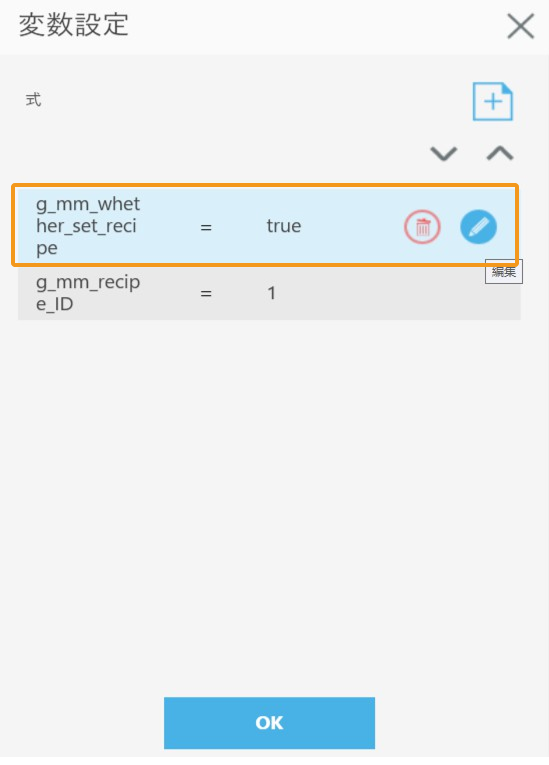
-
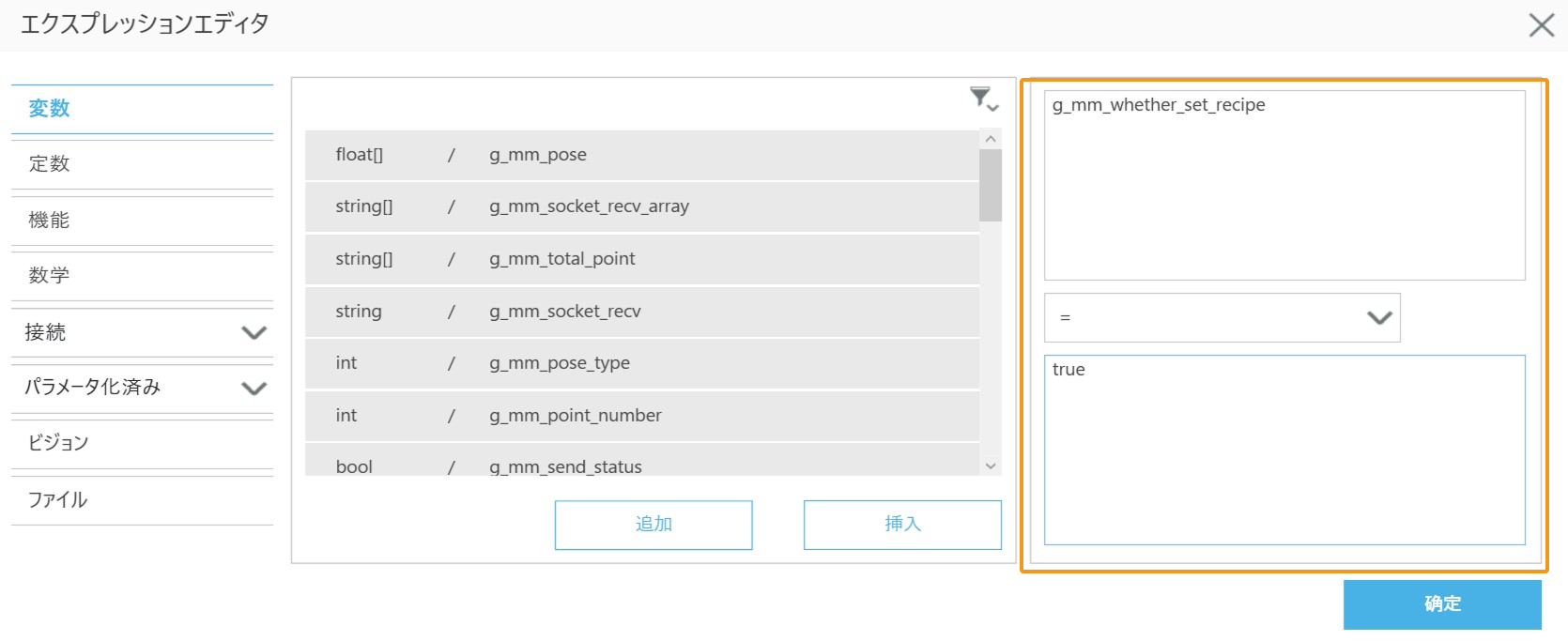
右のエリアでパラメータ値を変更してから 確認 をクリックします。
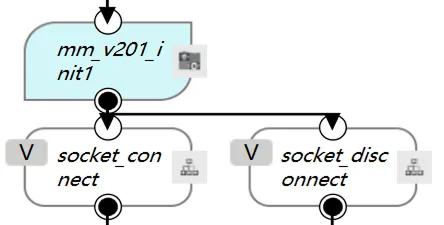
ネットワーク接続(MM init)
このコンポネントは、IPCとのネットワーク接続を構築するのでプログラムの始めに置かなければなりません。
設定可能なパラメータ
こちら をクリックしてIPCのIPアドレスとポート番号修正方法を確認してください。
Mech-Visionプロジェクトを実行 (Run Vision)
このコンポネントは、Mech-Visionプロジェクトで使用されるパラメータレシピを設定し(プロジェクトにパラメータレシピがない場合はスキップします)、それからMech-Visionプロジェクトを実行してビジョンシステムの出力結果(ビジョンポイント)を返します。
設定可能なパラメータ
-
config
-
g_mm_pose_type:ロボット実機の位置姿勢がMech-Visionプロジェクトに送信される形式を指定します。値が0、1、2です。詳細な説明は以下のようです。
g_mm_pose_type 説明 適用シーン 0
このコンポネントは、ロボットの位置姿勢をMech-Visionプロジェクトに送信する必要はありません。
カメラの取り付け方式がEye to Handである場合、この設定を使用します。
1
ロボットの現在の関節角度をMech-Visionプロジェクトに送信します。
カメラの取り付け方式がEye in Handである場合、必ずこの設定を使用してください。
直交ロボットを使用するシーンを除き、ほとんどのシーンではこの設定を推奨します。
2
ロボットの現在のフランジ位置姿勢をMech-Visionプロジェクトに送信します。
直交ロボットを使用する場合、この設定を推奨します。
-
g_mm_point_number:ビジョンポイントの数。
デフォルトでは、一度にビジョンシステムによって送信されるビジョンポイントの最大数は20個であるため、このパラメータの最大初期値は20となります。Mech-Visionでは、ツールバーから をクリックします。実際の状況に応じて 一度に送信する位置姿勢の最大数 を設定し、最大数量を30まで設定可能です。
-
g_mm_project_ID:Mech-Visionプロジェクト番号。
Mech-Visionプロジェクト番号は、Mech-Visionのプロジェクトリストで確認できます。プロジェクト名の前の数字は、プロジェクト番号を示します。
-
-
Set_Recipe
-
g_mm_whether_set_recipe:パラメータレシピを設定するかどうか(true:設定する、false:設定しない)。
-
g_mm_recipe_ID:Mech-Visionプロジェクトのパラメータレシピ番号。
-
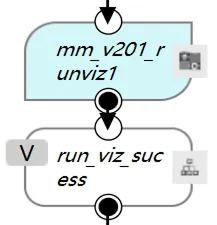
Mech-Vizプロジェクトを実行(Run Viz)
このコンポネントは、Mech-Vizプロジェクトを実行し、インデックス付きステップの現在のインデックス値を設定します(設定する必要がないプロジェクトはスキップします)。それから「メッセージによって異なる分岐を実行」ステップの分岐を設定し(「メッセージによって異なる分岐を実行」ステップがある場合)、Mech-Vizプロジェクトが計画した経路に戻ります。
設定可能なパラメータ
-
Config
-
g_mm_runviz_pose_type:ロボット実機の位置姿勢がMech-Vizプロジェクトに送信される形式を指定します。値が0、1です。詳細な説明は以下のようです。
g_mm_runviz_pose_type 説明 適用シーン 0
Mech-Vizプロジェクトにロボットの位置姿勢を送信する必要はありません。Mech-Vizプロジェクトでは、仮想ロボットが設定された初期位置から最初の経路点に移動します。
カメラがEye to Hand方式で取り付けられている場合に推奨します。
1
Mech-Vizプロジェクトにロボットの現在の関節角度とフランジ位置姿勢を送信する必要があります。Mech-Vizプロジェクトでの仮想ロボットは受信された位置姿勢から最初の経路点に移動します。
カメラがEye in Hand方式で取り付けられている場合に推奨します。
-
g_whether_after_161:Mech-VisionとMech-Vizのバージョンが1.6.1以降であるかどうか。trueは1.6.1以降、falseは1.6.1以降ではない。
-
-
Set_Branch
-
g_mm_whether_set_branch:「メッセージによって異なる分岐を実行」ステップの出口を設定するかどうか。trueは設定する、falseは設定しない。
-
g_mm_branch_task_ID:「メッセージによって異なる分岐を実行」ステップの番号。
-
g_mm_branch_out_port:「メッセージによって異なる分岐を実行」ステップの出口番号。
-
-
Set_Index
-
g_mm_whether_set_index:現在のインデックスを設定するかどうか。trueは設定する、falseは設定しない。
-
g_mm_index_task_ID:インデックス付きのステップ番号。
-
g_mm_index_value:インデックス付きのステップの現在のインデックス値。
-
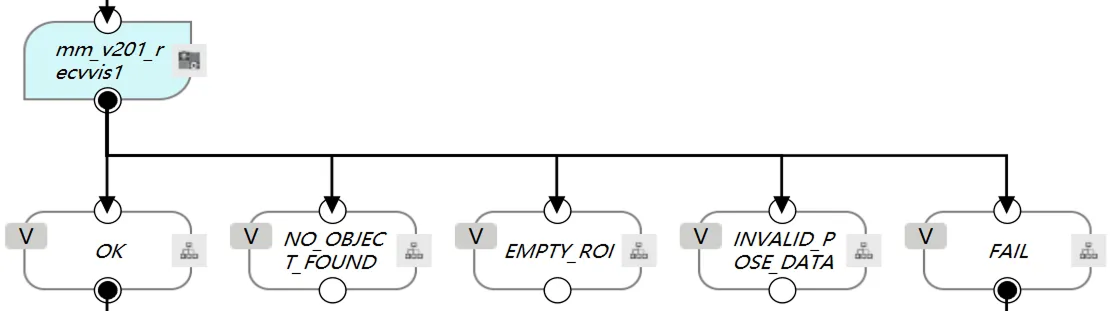
経路計画を取得 (Receive Viz)
このコンポネントは、Mech-Vizプロジェクトによって計画された動作経路(一連の経路点)を取得するために使用されます。

このコンポーネントが実行された後、Mech-Vizからの経路は文字列配列(string[])の形式でg_mm_socket_recv_arrayというグローバル変数に保存され、ユーザーはこの変数のデータを処理することができます。
経路点の位置姿勢は文字列配列(string[])の形式でg_mm_total_pointというグローバル変数に保存されます。最初の6つの要素が最初の経路点の位置姿勢であり、7番目から12番目の要素が2番目の経路点で、等々。
さらに、このコンポーネントは整数型(int)の変数g_mm_recv_viz_timeを提供しており、コンポーネントのトリガー回数を記録します。この変数は0からカウントを開始し、Receive Vizコンポーネントの1回の実行に対応します。2回実行すると1になります。