ロボットの基本操作
以下では、安川ロボットの基本操作について説明します。
ロボットがビジョンポイントに到達したときに使用するツールを定義
以下の操作は、P071位置レジスタを例にして、ツール1を設定するものです。
| ツール0の位置姿勢データはすべて0でなければなりません。ツール0の位置姿勢はフランジ位置姿勢です。 |
-
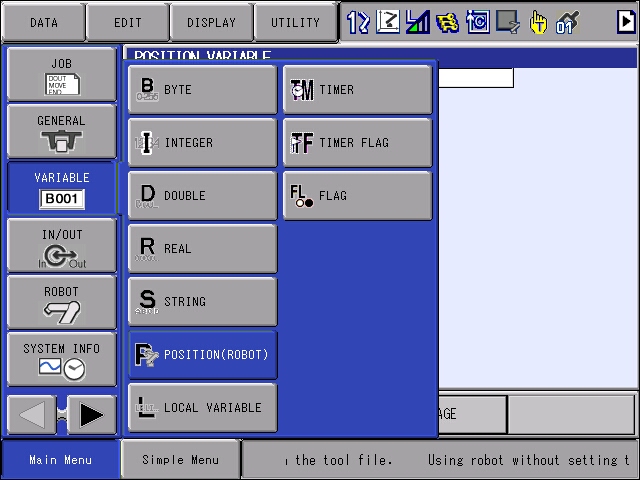
ティーチインモードでは、特定のプログラムを選択した後、 を順番にクリックします。
-
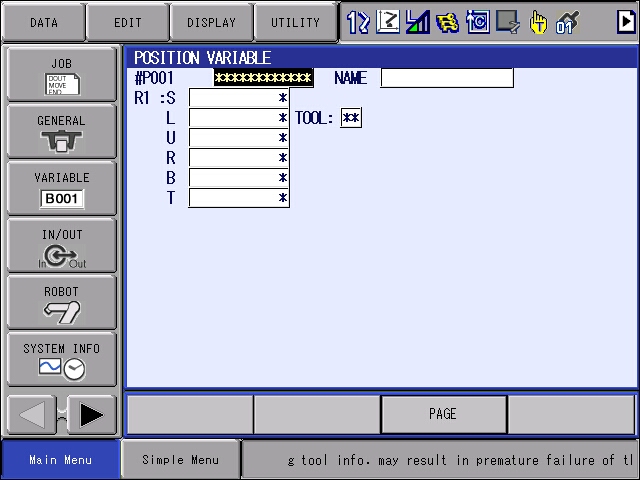
POSITION VARIABLE画面で、 PAGE をクリックします。
-
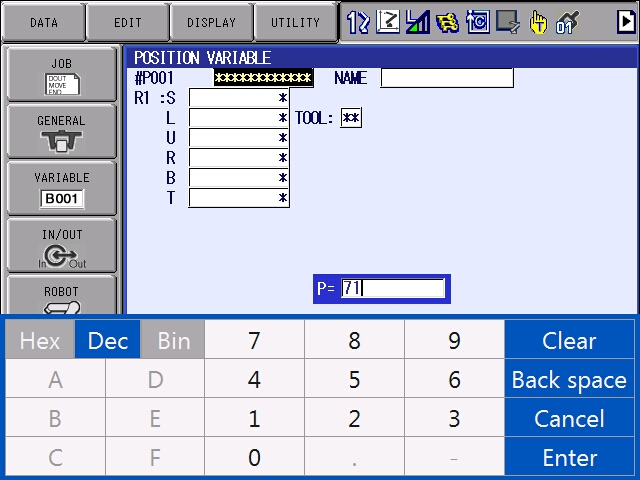
キーパッドパネルがポップアップしますので、 Dec を選択し、 71 (P071位置レジスタ)を入力し、 Enter をクリックします。
-
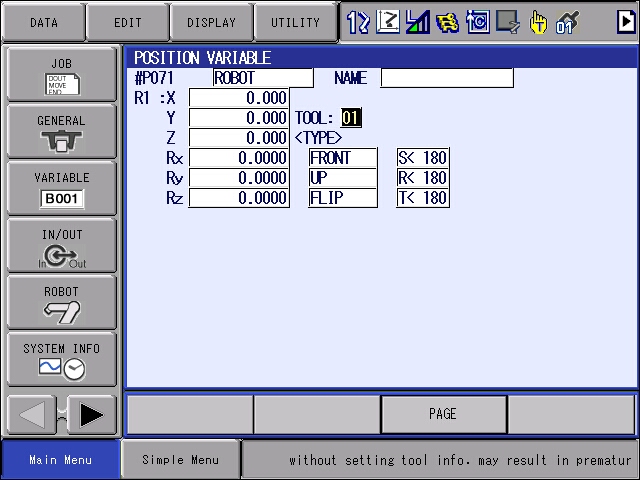
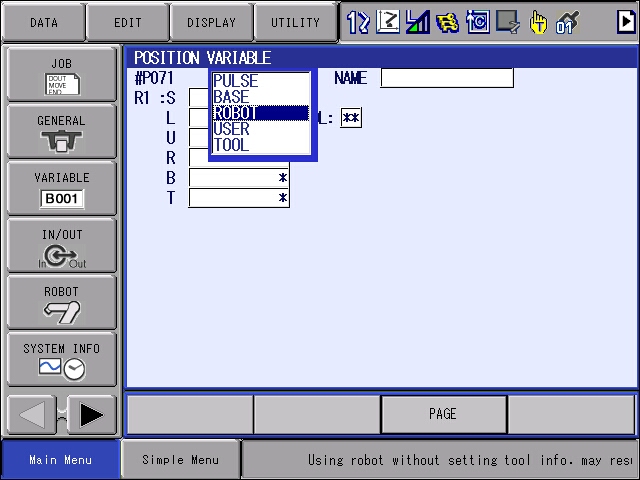
座標系を ROBOT に設定します。
-
TOOL をクリックしてキーボードパネルを表示し、 1 (ツール1を使用)と入力して Enter をクリックします。
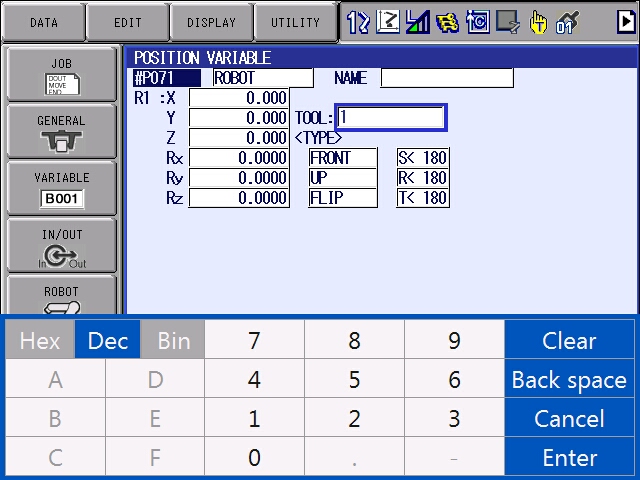
設定完了後の画面は以下の通りです。