標準インターフェース通信設定
CRXプラグインはTCPプロトコルに基づくソケット通信を使用し、IPC上のビジョンシステムと連携します。ネットワーク構成および通信両方のIP設定に変更がない限り、通信設定は初回のみ行えば十分です。
| CRXプラグインを再インストールした場合は、通信設定を再度行う必要があります。 |
CRXプラグインがビジョンシステムと接続する前に、以下の項目が完了していることを確認してください。
-
CRXプラグインが正常にインストールされていること。
-
ロボットコントローラがMech-Mind IPCとイーサネットで接続されていること(ルーター経由も可)。
「ロボット通信設定」を実行
-
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
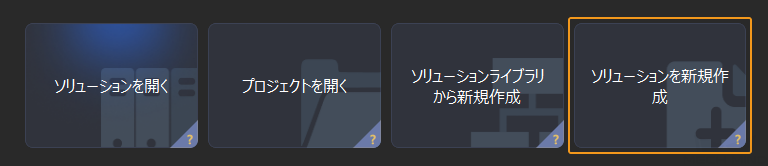
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
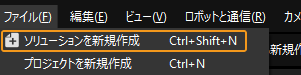
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 ドロップダウンリストから 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
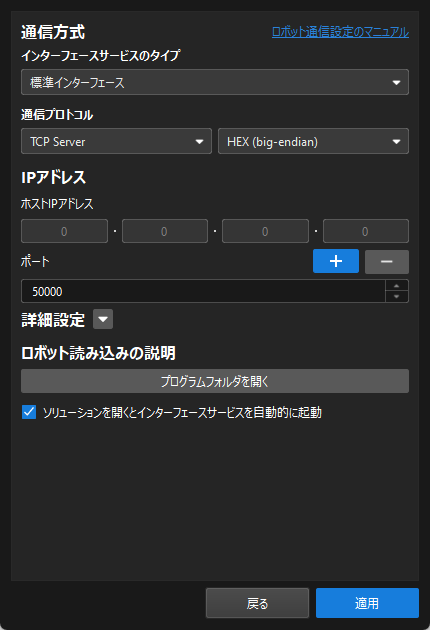
通信方式 の画面で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を HEX(big-endian) に選択します。
-
ポート番号は50000または50000以上に設定することを推奨します。設定したポート番号が他のプログラムに使用されていないことを確認してください。
-
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-
-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
ティーチペンダントで通信を設定
-
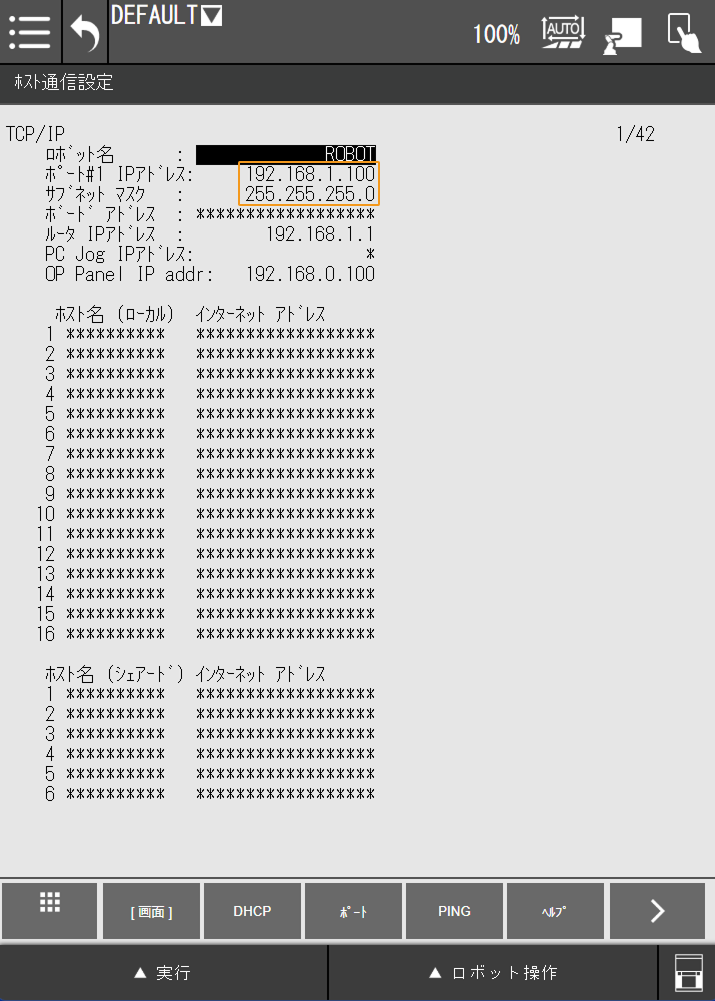
ロボットのIPアドレスを設定します。
-
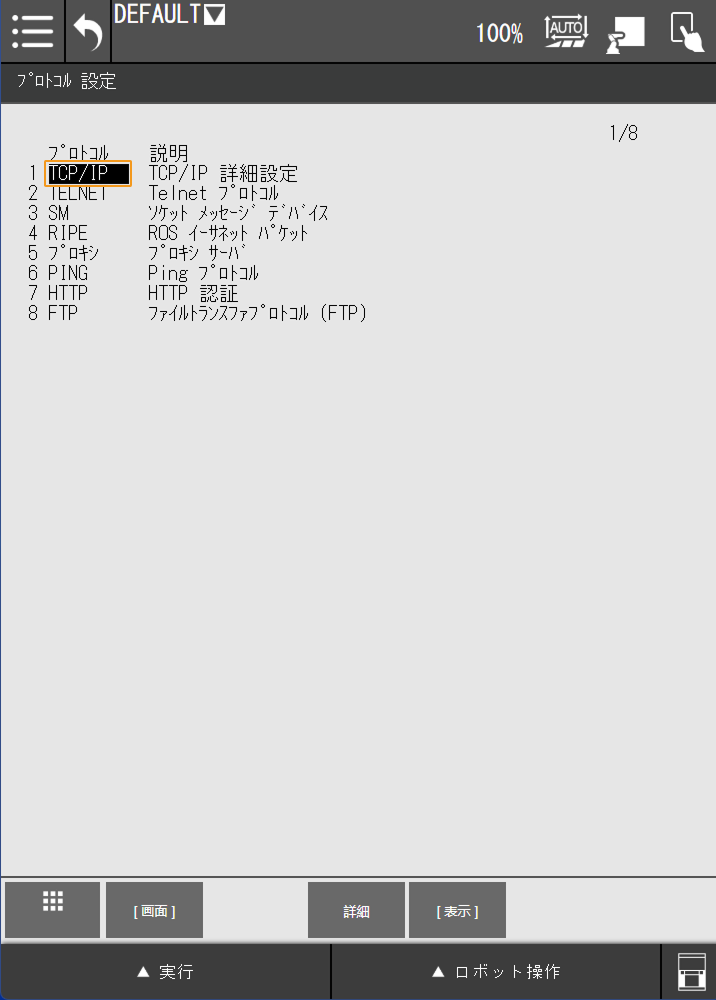
完全メニューをクリックし、設定 > ホスト通信 の順に選択してプロトコル設定画面を開きます。

-
TCP/IP をクリックし、IPアドレス とサブネットマスクを要件に応じて設定します。
-
-
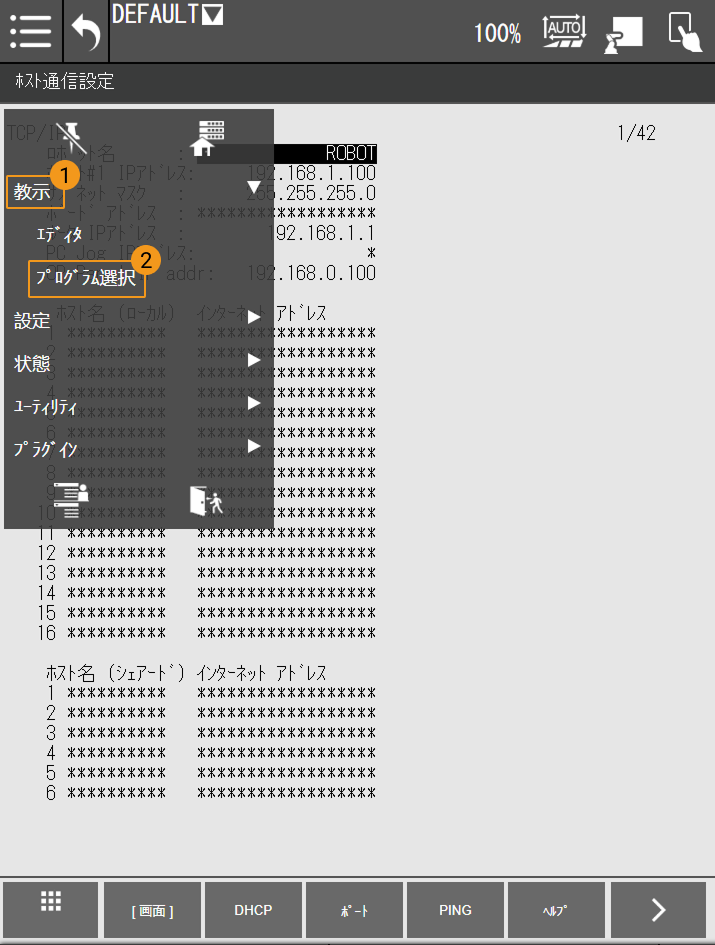
ロボットプログラムを新規作成します。
-
メニューをクリックして通常メニューに切り替え、教示 > プログラム選択 を選択します。
-
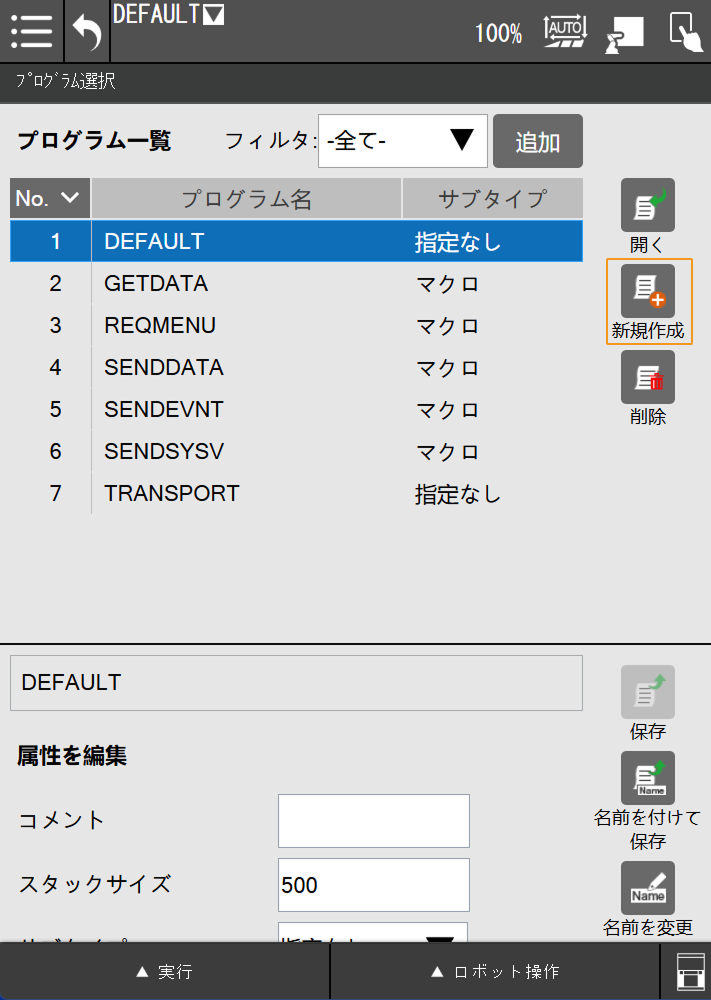
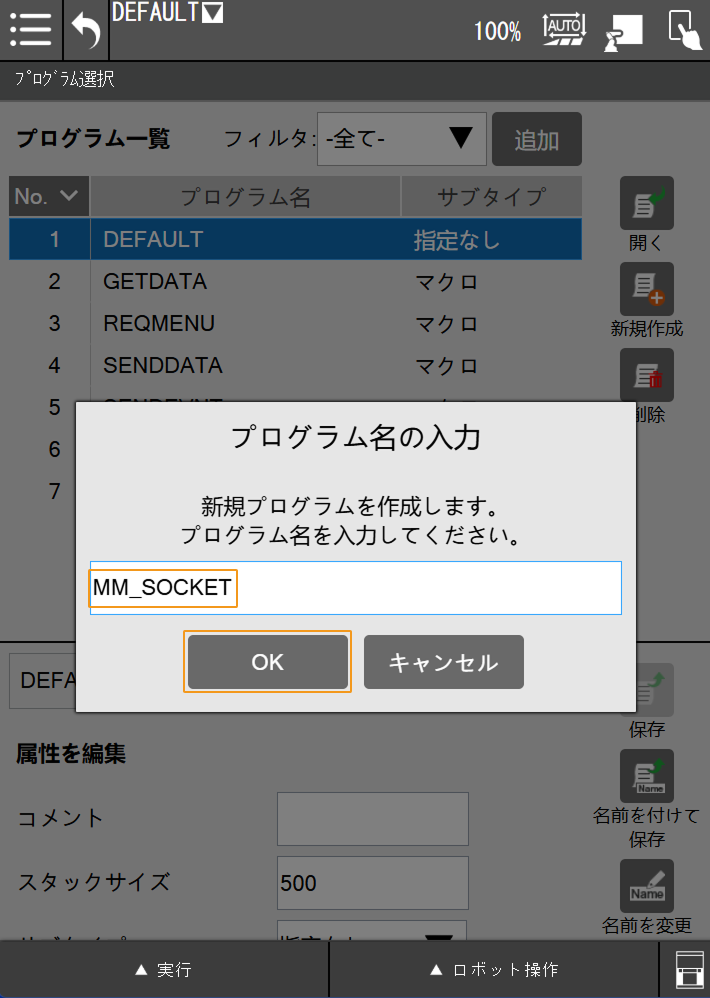
右側の 新規作成 をクリックします。
-
例として「MM_SOCKET」という名前を入力し、OK をクリックします。
-
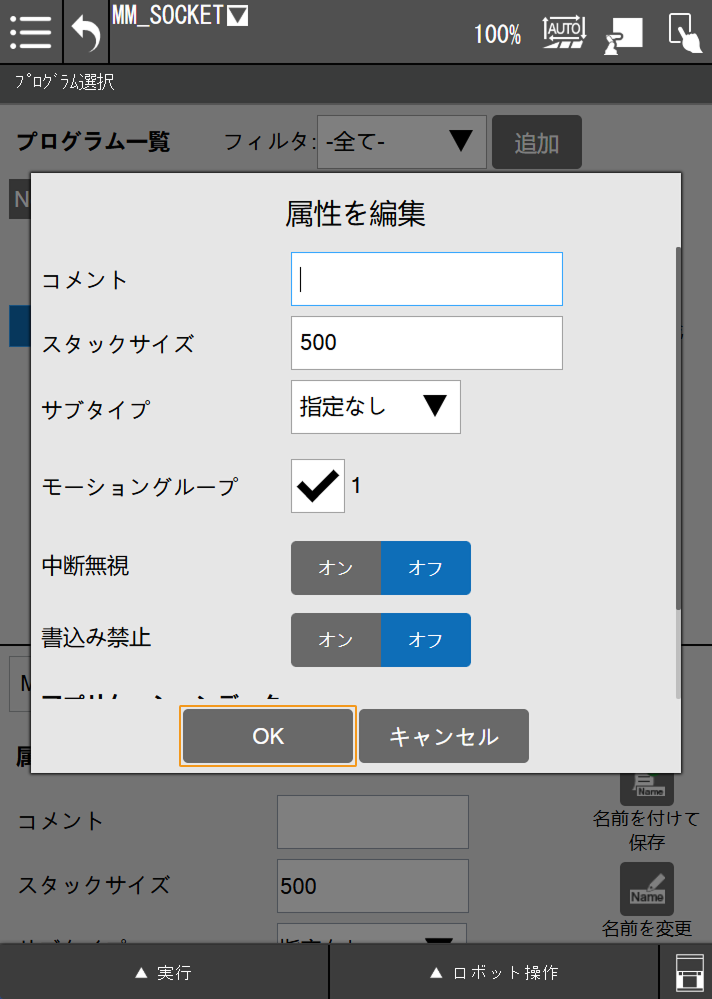
プログラム属性はデフォルト設定で問題ありません。OK をクリックします。
-
-
通信接続の機能を呼び出します。
-
作成したプログラムに入り、編集モードにします。
自動モードでは編集できません。右上の表示が自動モード(アイコン:  )であれば、手動モード(アイコン:
)であれば、手動モード(アイコン: )に切り替えてください。
)に切り替えてください。
-
プログラミング > プラグイン を選択すると、すべてのプラグインが右下に表示されます。

-
一覧から Mech視覚システム通信初期化設定 を見つけ、上部のワークフローにドラッグします。

-
追加されたコマンドをクリックして詳細画面を開きます。IPCのIPアドレス を使用するIPCのアドレスに、IPCのポート をMech-Visionで設定したポート番号に設定します。
初めて コントローラのLANポート番号(1~8)を変更した後、再起動する必要があります。それにより変更が有効になります。

パラメータの横の「?」マークを長押しすると、説明が表示されます。
-
右上のアイコンで手動モード(アイコン:
)から自動モード(アイコン:)に切り替えます。 -
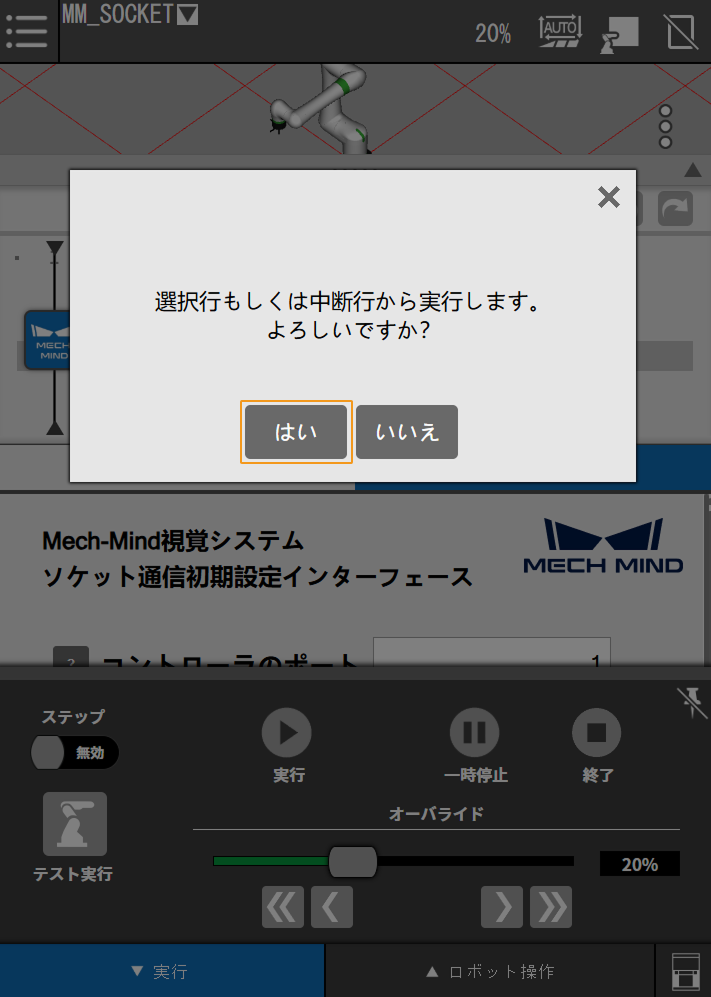
左下の 実行 オプションをクリックし、実行 をクリックします。

-
ダイアログが表示されたら、はい を選択します。
-
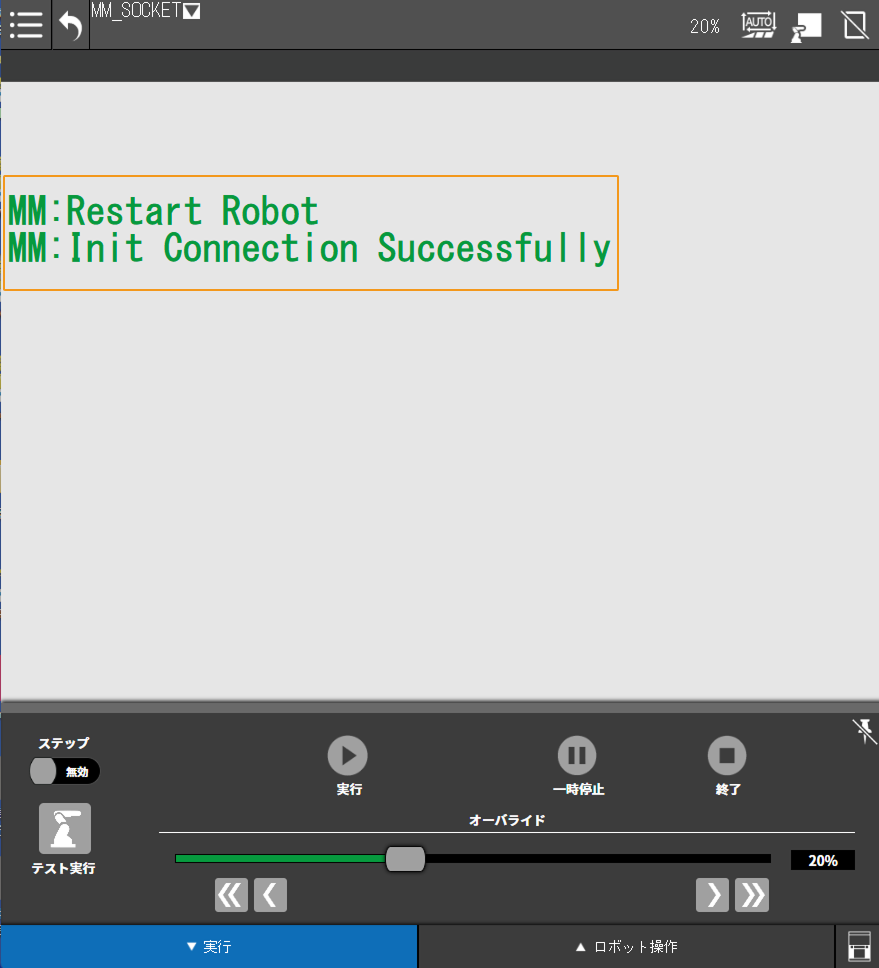
自動的に ユーザー タブ(完全メニュー)に切り替わり、ユーザーインターフェースが表示されます。ティーチペンダントの画面に「MM:Init Connection Successfully」と表示される場合、通信テストは成功です。
ティーチペンダントの画面に「MM: Restart Robot」と表示された場合、またはページが自動で切り替わらない場合は、手動でコントローラの電源をオフにして再起動し、上記のプログラムを再度実行してください。
また、Mech-Visionのログバーの コンソール タブでも関連メッセージが表示されます。
-
-
通信が成功したら、コントローラの電源を手動でオフにし、再起動します。