サンプルプログラム
本節では簡単な認識と移動を実行するサンプルプログラムとその操作手順を説明します。
概要
簡単な把持・配置のサンプルプログラムは、「JAKA標準インターフェース通信設定」 にロードされました。
3つのサンプルプログラムは次の通りです。
Mech-Visionでビジョン認識を行い、結果を取得
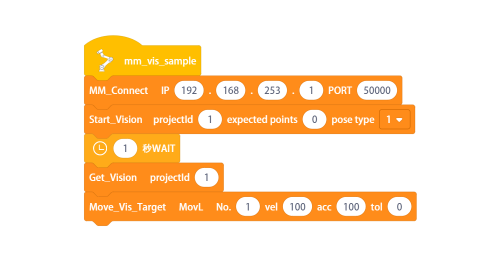
プログラミング 画面で、以下のコマンドをドラッグするか、読み込み 済みのmm_vis_sampleプログラムを開きます。
プログラム説明
-
プログラム名は、「mm_vis_sample」です。
-
ロボットとIPCを接続します。IPCのIPアドレスとポート番号を設定する必要があります。詳細については、MM_Connect コマンドをご参照ください。
-
Mech-Visionプロジェクトを起動します。Mech-Visionプロジェクト番号と取得したい位置姿勢の数、ロボットがMech-Visionに送信する位置姿勢のタイプを設定する必要があります。詳細については、Start_Vision コマンドをご参照ください。
-
1秒待機して、ロボットの振動による撮影への影響を防ぎます。
-
Mech-Visionプロジェクトが出力するビジョン処理の結果を受信します。Mech-Visionプロジェクト番号を設定する必要があります。詳細については、Get_Vision コマンドをご参照ください。
-
Mech-Visionが出力した位置姿勢に移動します。移動の目標点、移動速度・加速度、目標点に到着する誤差を設定できます。詳細については、Move_Vis_Target コマンドをご参照ください。
Mech-Vizで経路を計画
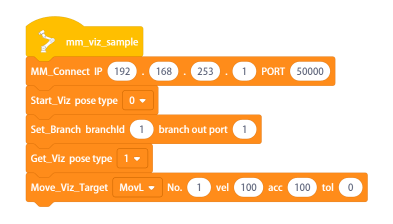
プログラミング 画面で、以下のコマンドをドラッグするか、読み込み 済みのmm_viz_sampleプログラムを開きます。
プログラム説明
-
プログラム名は、「mm_vis_sample」です。
-
ロボットとIPCを接続します。IPCのIPアドレスとポート番号を設定する必要があります。詳細については、MM_Connect コマンドをご参照ください。
-
Mech-Vizプロジェクトを開きます。ロボットからMech-Vizに出力する位置姿勢のタイプを設定する必要があります。詳細については、Start_Viz コマンドをご参照ください。
-
分岐を設定します。分岐ステップ名と出口番号を設定する必要があります。詳細については、Set_Branch コマンドをご参照ください。
-
Mech-Vizプロジェクトが出力するデータを受信します。経路点を返す方式を指定する必要があります。詳細については、Get_Viz コマンドをご参照ください。
-
Mech-Vizが出力した経路点に移動します。移動の目標点、移動速度・加速度、目標点に到着する誤差を設定できます。詳細については、Move_Vis_Target コマンドをご参照ください。
Mech-Visionの「経路計画」ステップを使用して経路を取得
プログラミング 画面で、以下のコマンドをドラッグするか、読み込み 済みのmm_vispath_sampleプログラムを開きます。

プログラム説明
-
プログラム名は、「mm_vispath_sample」です。
-
ロボットとIPCを接続します。IPCのIPアドレスとポート番号を設定する必要があります。詳細については、MM_Connect コマンドをご参照ください。
-
Mech-Visionプロジェクトを起動します。Mech-Visionプロジェクト番号と取得したい位置姿勢の数、ロボットがMech-Visionに送信する位置姿勢のタイプを設定する必要があります。詳細については、Start_Vision コマンドをご参照ください。
-
1秒待機して、ロボットの振動による撮影への影響を防ぎます。
-
Mech-Visionの「経路計画」ステップが出力する経路を受信します。Mech-Visionプロジェクト番号と経路点の位置姿勢タイプを設定する必要があります。詳細については、Get_Vis_Path コマンドをご参照ください。
-
計画した経路点に移動します。移動の目標点、移動速度・加速度、目標点に到着する誤差を設定できます。詳細については、Move_Vis_Target コマンドをご参照ください。