把持プログラムの作成
CRX プラグインは参考用の把持フローを提供しており、少ないプログラミング作業で把持プログラムを作成することができます。
把持フローには以下の2種類のプログラムがあります。
-
Mech-Visionと連携して把持:Mech-Visionプロジェクトのみを使用し、Mech-Vizを使用したロボットの経路計画が不要なシーンに適しています。
-
Mech-Vizと連携して把持:Mech-VizプロジェクトとMech-Visionプロジェクトを併用し、ロボットに衝突のない動作経路を提供するシーンに適しています。
|
以下のサンプルは、現在使用中のロボットハンドとツールセンターポイント(TCP)が正しく設定されていることを前提としています。 |
Mech-Visionと連携して把持
このサンプルプログラムでは、Mech-Visionの撮像をトリガーし、ロボットを把持位置姿勢まで移動させます。
-
新しいロボットプログラム(本サンプルではMM_SAMPLE_VISION)を作成し、プログラミング を選択、左側の 全て リストから以下のコマンドを図に従ってドラッグします。
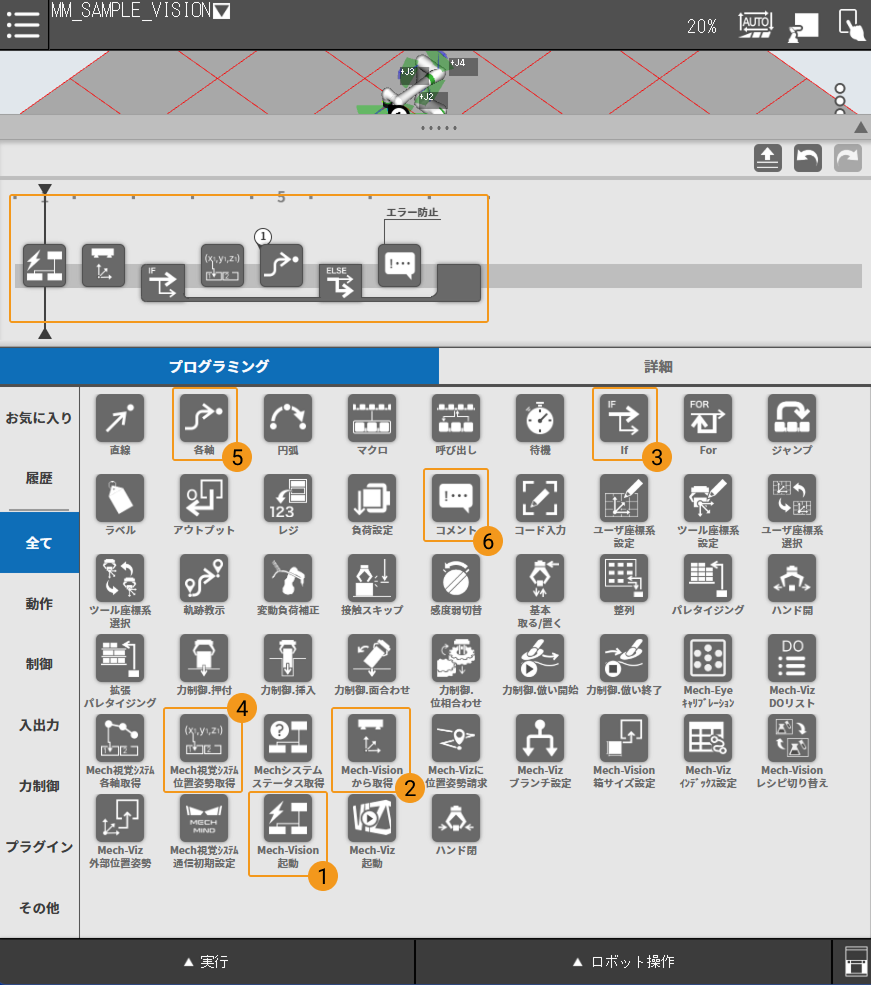
フロー内の コメント をクリックし、詳細 タブでコメント内容(例:エラー防止)を入力します。コメントアイコン上に入力内容が表示されます。
プログラムフローの説明:
-
ロボットは現在位置で Mech-Vision起動 コマンドを実行し、Mech-Visionプロジェクトを起動します。
-
ロボットは Mech-Visionから取得 コマンドを実行し、Mech-Visionプロジェクトの処理結果を取得します。
-
If コマンドで結果を判断します。
-
Mech-Visionプロジェクトが正常に実行すれば、Mech視覚システム位置姿勢取得 コマンドを使用して最初の把持位置姿勢を指定の位置レジスタに保存します。ロボットは 各軸 コマンドを使用して、最初の把持位置姿勢まで関節移動します。
-
Mech-Visionプロジェクトの実行に異常があれば、エラー処理を行います(本サンプルでは省略)。
-
-
-
If をクリックし、下図に従って条件を設定します。
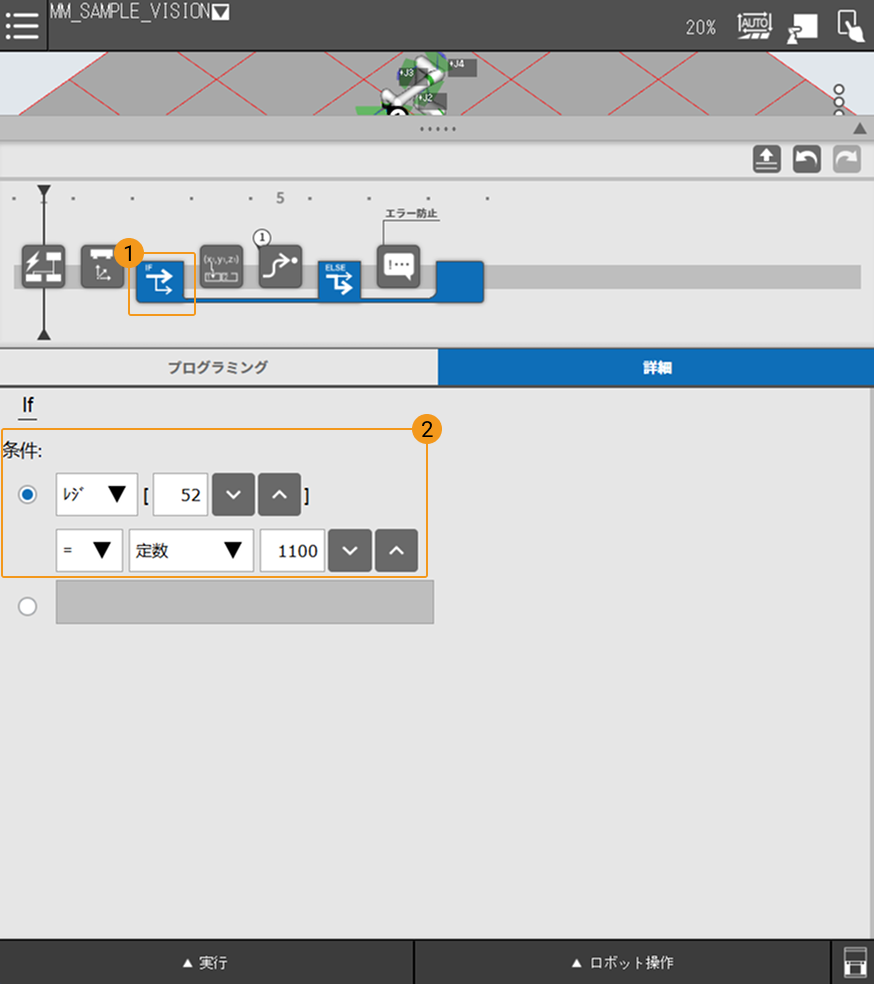
Ifコマンドの前で、登録された最初のMech-Visionプロジェクトが起動され、ステータスコードがR[52]に格納されます。IfコマンドではR[52]が1100かどうかを判断し、1100であればビジョンポイントを正常に取得できたことを意味します。それ以外の場合はエラー処理を行います(本サンプルでは省略)。
-
各軸 をクリックし、下図に従って位置レジスタを設定します。
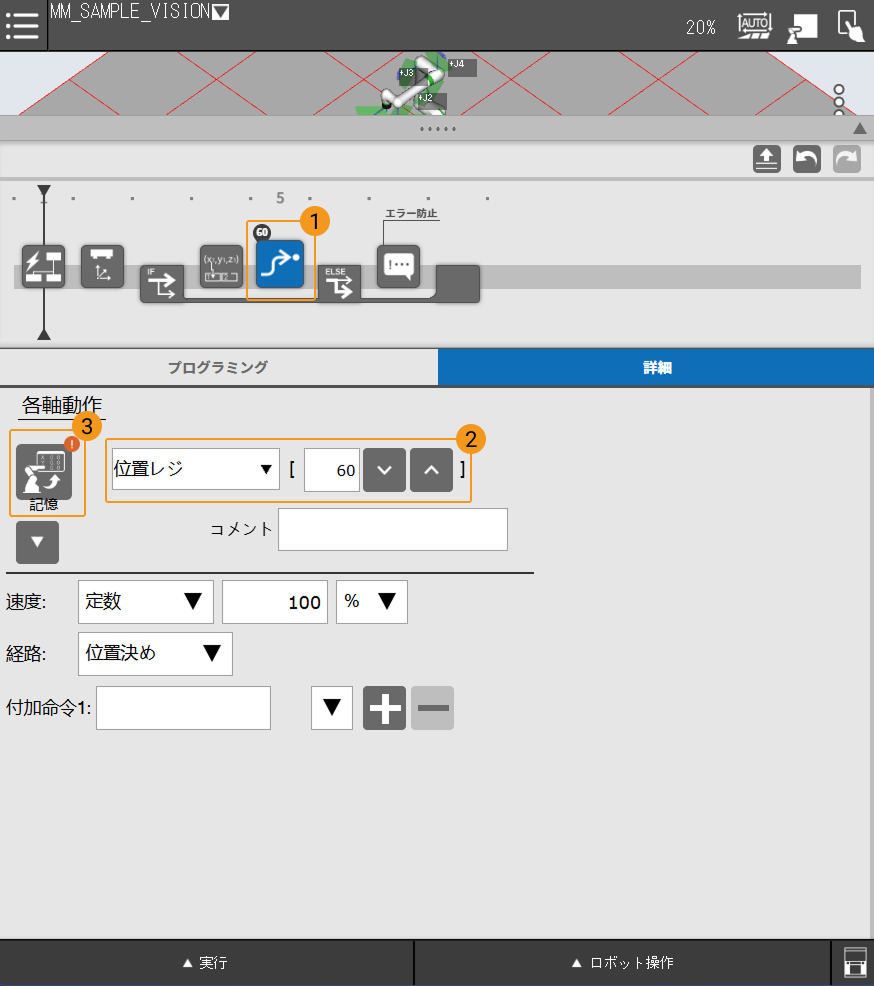
Mech-Visionプロジェクトが出力された最初の把持位置姿勢は TCP形式 でPR[60]に保存されます。把持位置姿勢が正常に取得できた後、moveJを使用してPR[60]へ移動します。
これで、Mech-Visionプロジェクトと連携した簡単な把持プログラムの作成が完了しました。右上で「自動モード」に切り替えた後、左下の 実行 オプションをクリックし、速度を少し下げてから 実行 をクリックするとプログラムが実行されます。
Mech-Vizと連携して把持
Mech-Vizプロジェクトの実行開始から終了までに出力されたすべての経路点は、Mech-Interfaceを通じてロボットに送信されます。このサンプルプログラムでは、Mech-Vizの計画をトリガーし、ロボットを次の経路点まで移動させます。
-
新しいロボットプログラム(本サンプルでは MM_SAMPLE_VIZ)を作成し、プログラミング を選択、左側の 全て リストから以下のコマンドを図に従ってドラッグします。
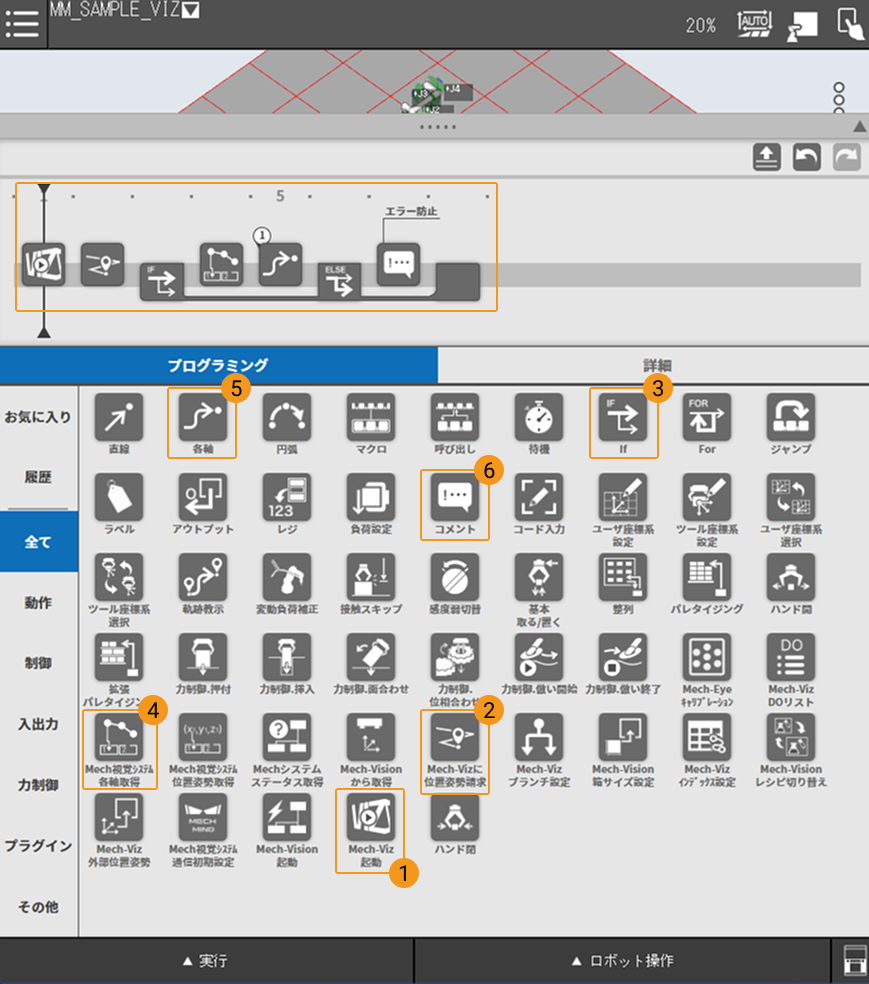
プログラムフローの説明:
-
ロボットは現在位置で Mech-Viz起動 コマンドを実行し、Mech-Vizプロジェクトを起動します。
-
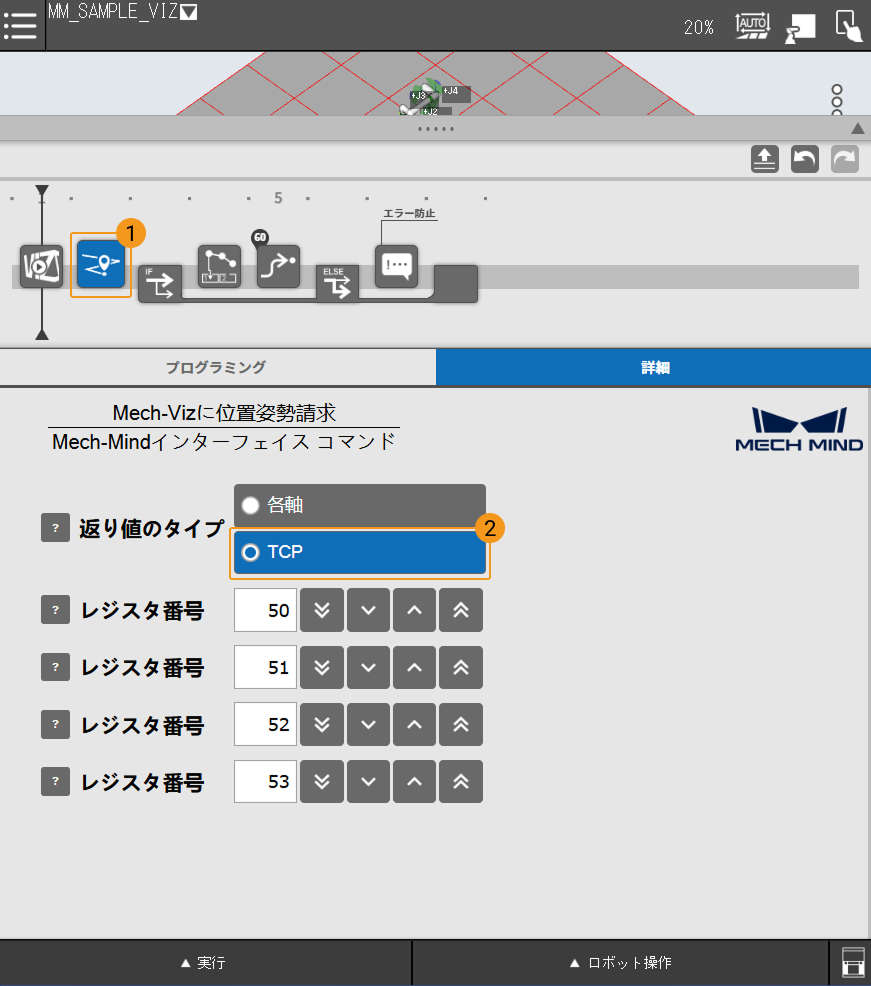
ロボットは Mech-Vizに位置姿勢請求 コマンドを使用して、Mech-Vizの経路計画結果を取得します。
-
If コマンドで結果を判断します。
-
Mech-Vizプロジェクトが正常に実行すれば、Mech視覚システム各軸取得 コマンドを使用して、Mech-Vizが出力された最初の経路点の関節角度の値を指定された位置レジスタに保存します。ロボットは 各軸 コマンドを使用して、関節角度を最初の経路点に移動させます。
-
Mech-Vizプロジェクトの実行に異常があれば、エラー処理を行います(本サンプルでは省略)。
-
-
-
If をクリックし、下図に従って条件を設定します。
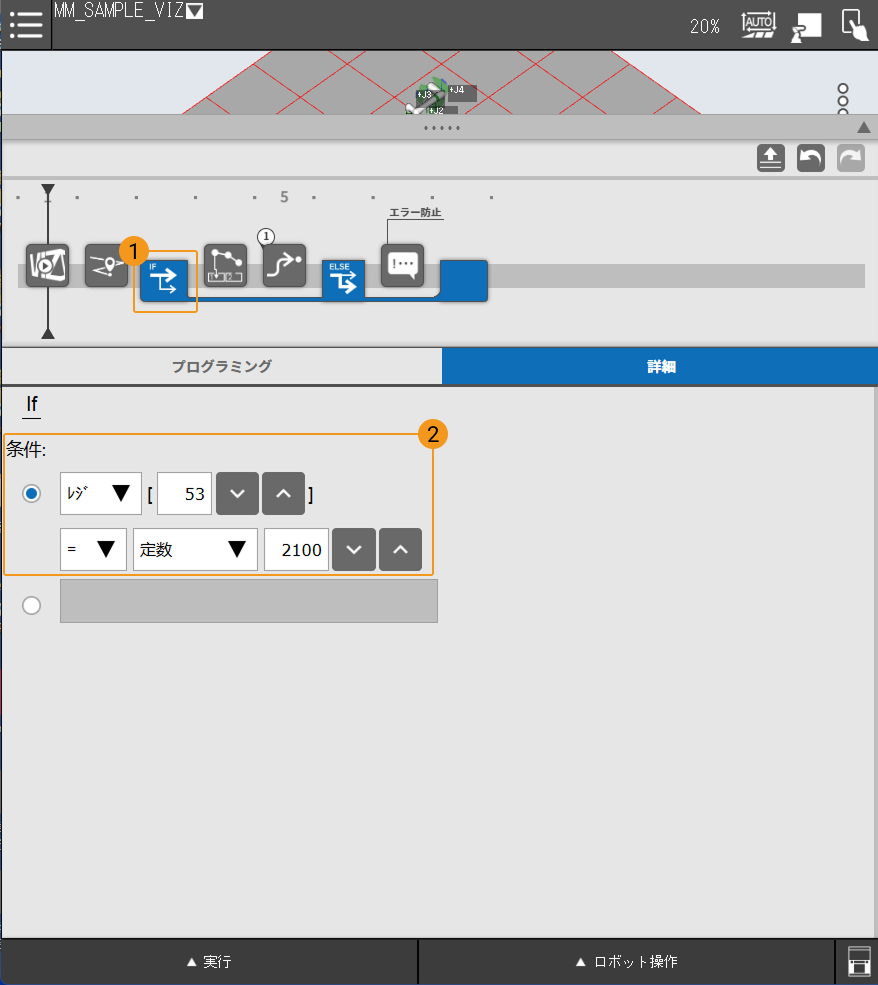
Ifコマンドの前で、登録されたMech-Vizプロジェクトが起動され、ステータスコードがR[53]に格納されます。IfコマンドではR[53]が2100かどうかを判断し、2100であれば正常にMech-Vizの実行が完了したことを意味します。それ以外の場合はエラー処理を行います(本サンプルでは省略)。
-
各軸 をクリックし、下図に従って位置レジスタを設定します。
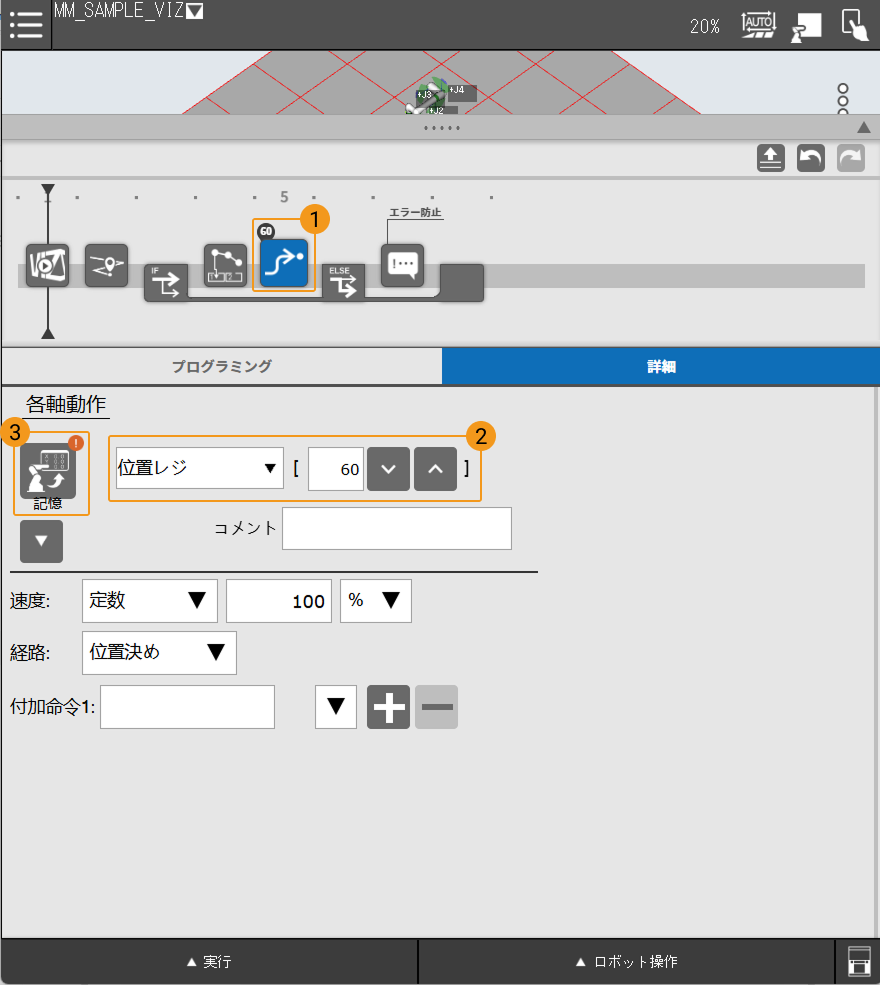
Mech-Vizプロジェクトが出力された最初の経路点は、関節角度形式 でPR[60]に保存されます。Mech-Vizプロジェクトが正常に実行された後、moveJを使用してPR[60]へ移動します。
TCPデータの送信が必要な場合は、「Mech-Vizに位置姿勢請求」コマンドの返り値をTCPに変更してください。その後、「Mech視覚システム各軸取得」コマンドは、点の位置姿勢をTCP形式でPR[60]に書き込みます。
これで、Mech-Vizプロジェクトと連携した簡単な把持プログラムの作成が完了しました。右上で自動モードに切り替えた後、左下の 実行 オプションをクリックし、速度を少し下げてから 実行 をクリックするとプログラムが実行されます。