自動キャリブレーション
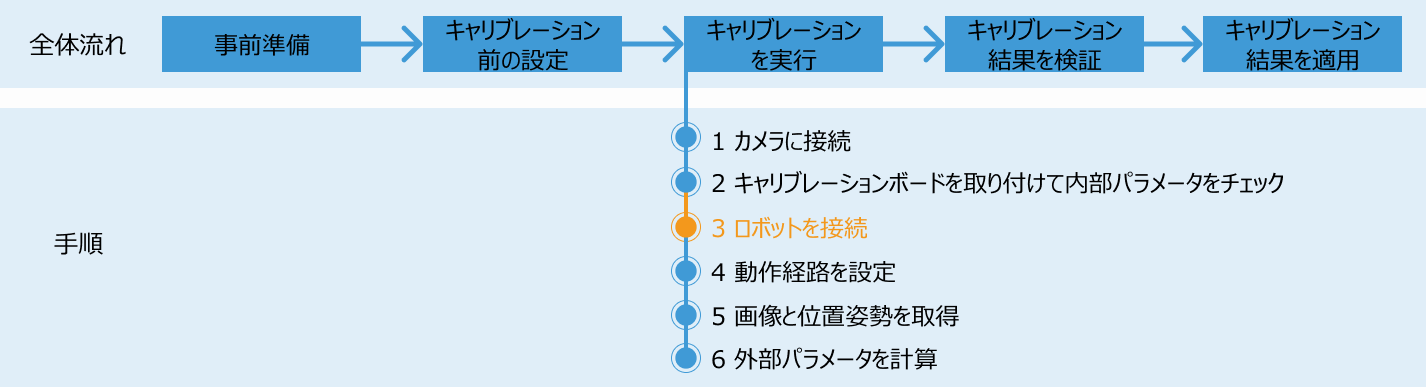
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
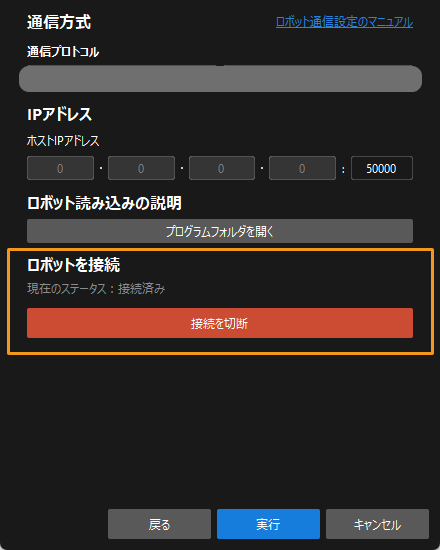
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
1. キャリブレーションプログラムの読み込み
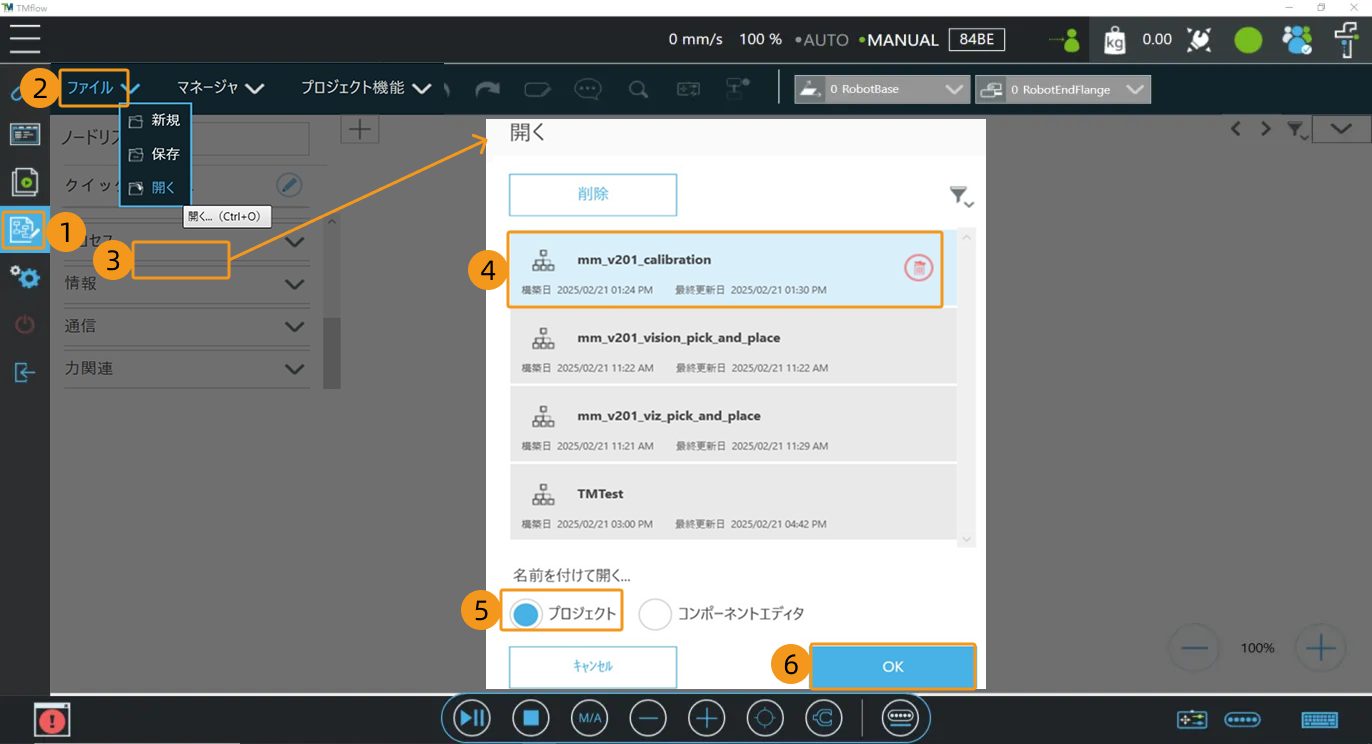
手動モード(Manual表示灯常時点灯している時)では、TMflowソフトウェアを起動します。下図のように設定を行い、mm_v201_calibration ファイルを開きます。
2. キャリブレーションの初期位置を設定
-
をクリックします。
-
表示される画面で編集ボタンをクリックします。

-
ポイント編集ウィンドウで デカルト座標 または 結合角度 をクリックし(ここではデカルト座標を例に)、値の変更 をクリックしてcali_point位置姿勢を編集することができます(この位置姿勢をキャリブレーションの初期位置に設定)。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。

-
編集完了後、適用 をクリックします。

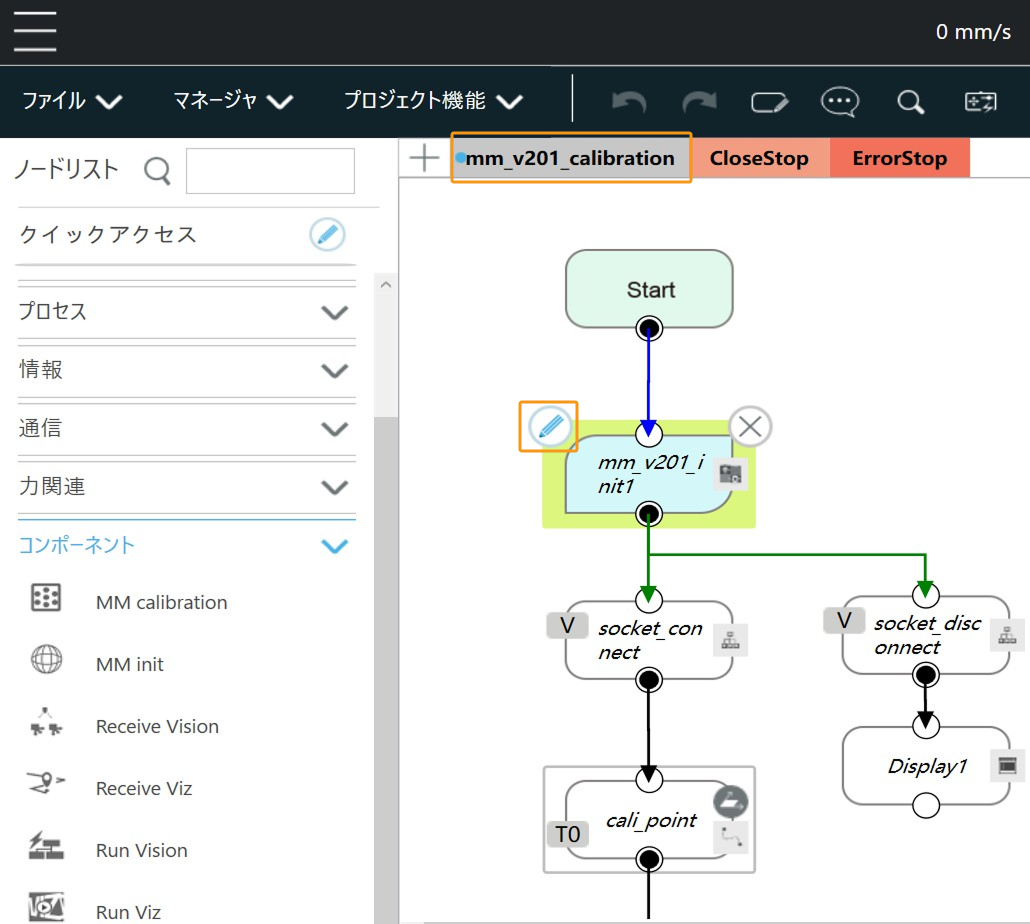
3. キャリブレーションプログラムを修正
-
mm_v201_calibration プログラム画面の mm_v201_init1 の左上の編集アイコンをクリックします。
-
send を選択して編集アイコンをクリックします。

-
選択 をクリックします。

-
右上の追加アイコンをクリックします。

-
vision3D_mm_mm_v201_init1.ntd_mm を選択し、編集アイコンをクリックして表示されたウィンドウに IP と ポート を入力します。最後に表示されたウィンドウで OK をクリックします。
-
IP にIPCのIPアドレスを入力してください。
-
ポート にMech-Visionで設定したホストポート番号を入力してください。

-