標準インターフェースコマンド
Mech視覚システム通信初期化設定
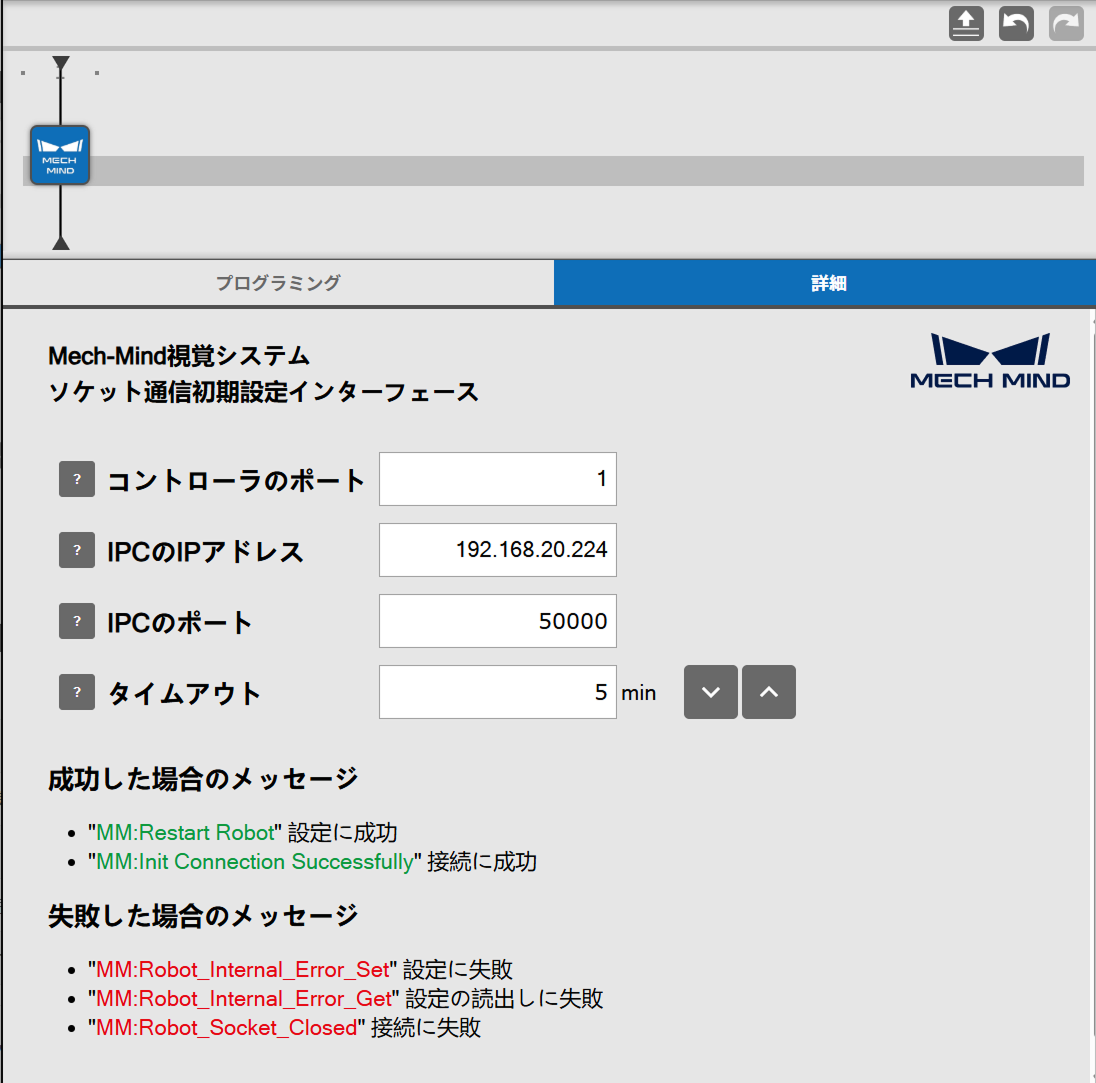
このコマンドは、IPC通信のアドレスおよびポートを設定するために使用されます。
パラメータ説明
| パラメータ | 説明 |
|---|---|
コントローラのLANポート番号 |
コントローラがIPCと通信する際に使用するネットワークポート番号 |
IPCのIPアドレス |
使用するIPCのIPアドレス |
IPCのポート |
Mech-Visionで設定されたポート番号 |
タイムアウト |
接続の試行を停止するまでの待機時間(単位は分) |
| 設定を変更する必要がない場合、ユーザーはCRXプラグインをインストールした後、一度だけ通信設定を行えば十分であり、その後のキャリブレーションプログラムや通常の使用時には通信設定を再度行う必要はありません。 |
Mech-Eyeキャリブレーション
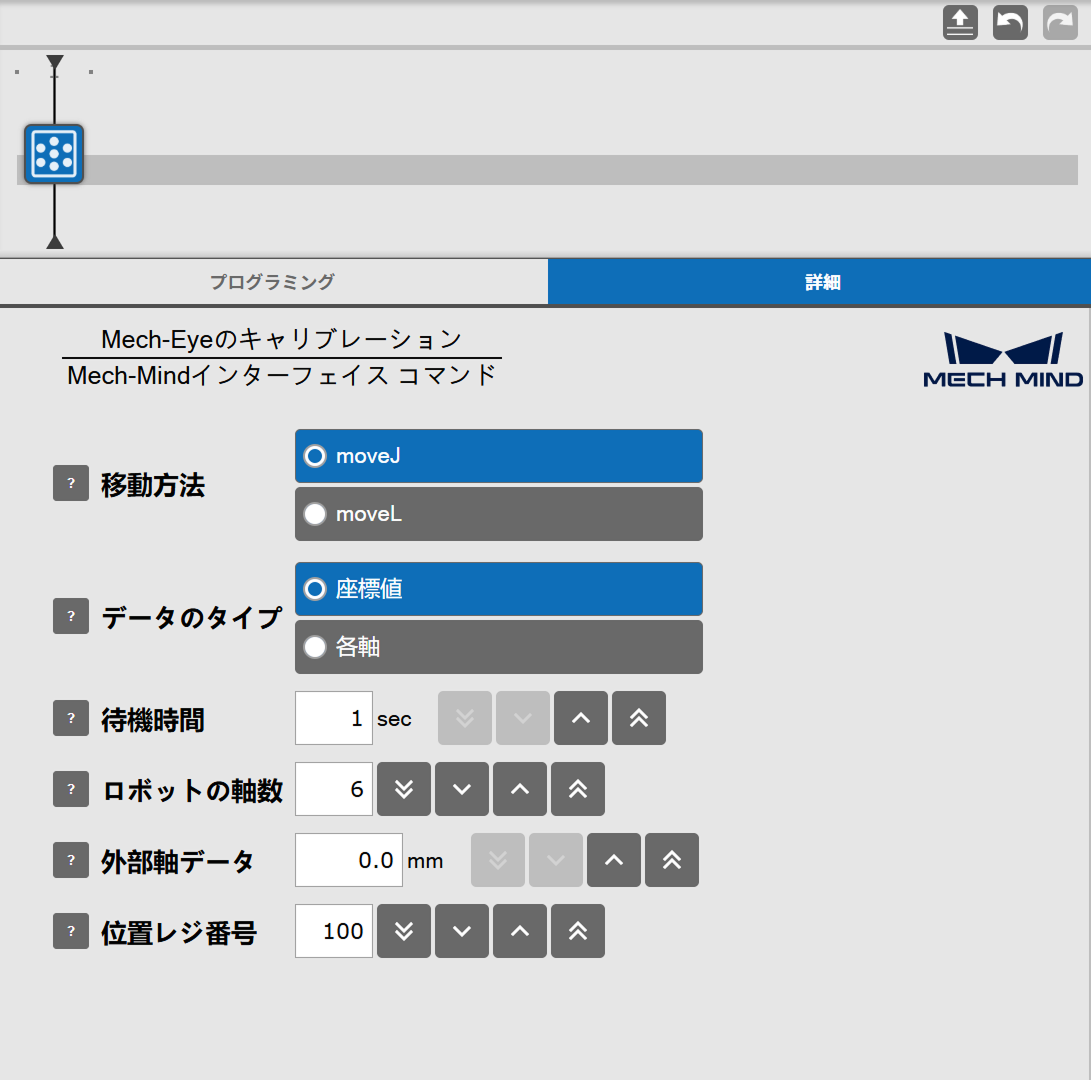
このコマンドは、カメラの外部パラメータを自動でキャリブレーションするために使用されます。Mech-Visionソフトウェアのカメラキャリブレーションツールと連携する必要があります。
パラメータ説明
| パラメータ | 説明 |
|---|---|
移動方法 |
自動キャリブレーションの過程では、ロボットの移動方式として、直線運動または関節運動のいずれかを選択できます。 |
データのタイプ |
ロボットが送信する位置データの種類であり、関節角度データまたは座標データのいずれかを選択できます。 |
待機時間 |
ロボットがキャリブレーションポイントに移動した後の待機時間です(ロボットの揺れを防ぐため)。通常は1〜5秒に設定することを推奨します。 |
ロボットの軸数 |
デフォルトでは6軸ですが、ロボットに7軸がある場合は7に設定する必要があります。 |
外部軸データ |
これは7軸を有するロボットに対応するためのもので、この値にはキャリブレーション時に7軸が固定される位置データを設定します。 |
位置レジ番号 |
この値には、キャリブレーション開始点の位置を保存した位置レジスタの番号を設定する必要があります。 |
Mech-Vision起動
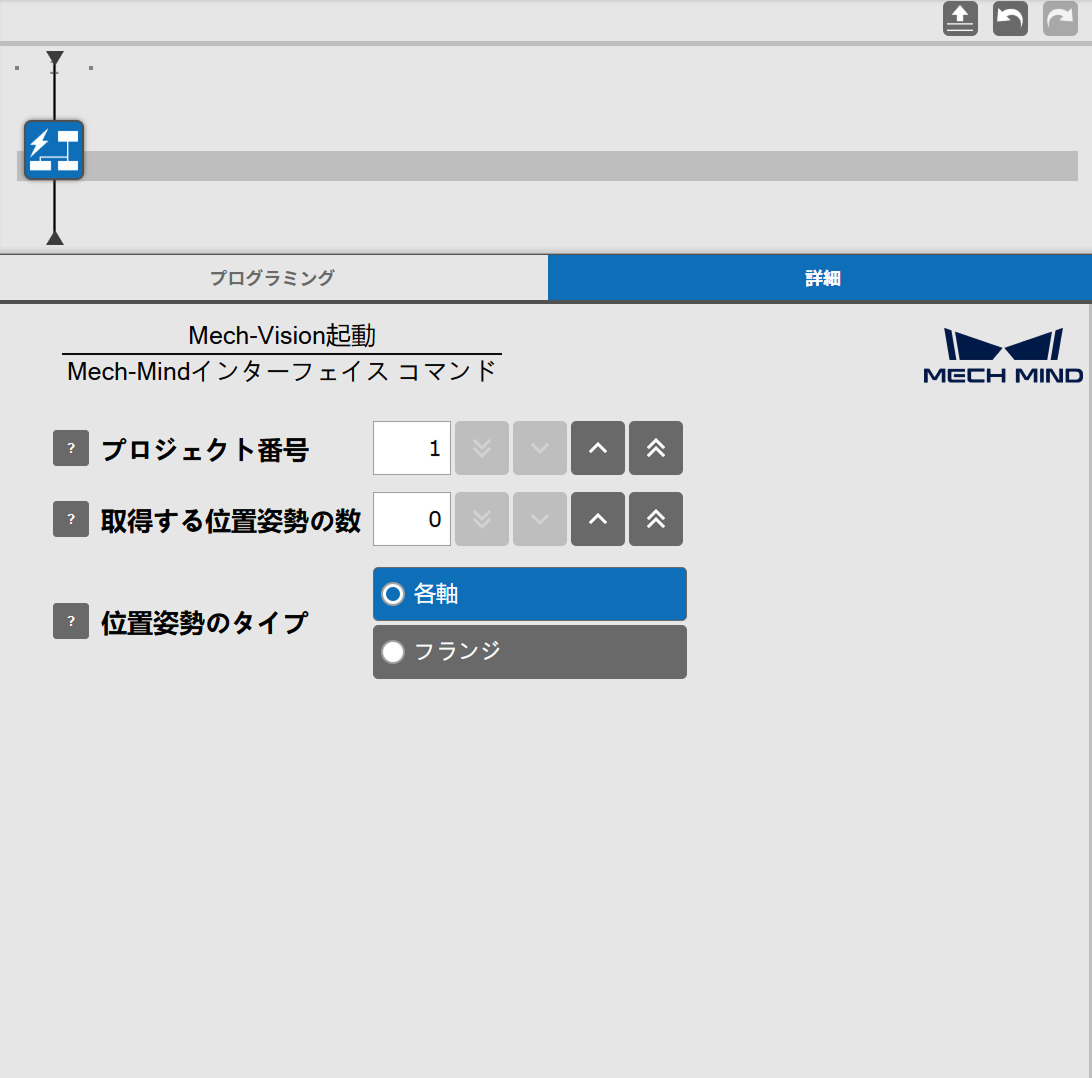
このコマンドは、Mech-Visionプロジェクトを実行するために使用されます。
パラメータ説明
| パラメータ | 説明 | ||
|---|---|---|---|
プロジェクト番号 |
Mech-Visionのプロジェクト番号。Mech-Visionのプロジェクトリストで確認可能で、プロジェクト名の前に表示される数字がプロジェクト番号を表します。 |
||
取得する位置姿勢の数 |
Mech-Visionから出力するビジョンポイントの数を指します。0を設定した場合、検出されたすべてのビジョンポイント(最大20個まで)を出力します。1~20の整数を設定した場合、検出されたビジョンポイントの総数がこの値を超える場合でも、Mech-Visionは指定された数のビジョンポイントを返そうとします。
|
||
位置姿勢のタイプ |
各軸: ロボットの現在の関節角度をMech-Visionに送信します。
|
Mech-Visionから取得
このコマンドは、Mech-Visionプロジェクトの実行結果を受信するために使用されます。Mech-Vision起動 の後に使用する必要があります。

パラメータ説明
| パラメータ | 説明 |
|---|---|
プロジェクト番号 |
Mech-Visionのプロジェクト番号。Mech-Visionのプロジェクトリストで確認可能で、プロジェクト名の前に表示される数字がプロジェクト番号を表します。 |
レジスタ番号 1 |
1:Mech-Visionデータ送信完了。
|
レジスタ番号 2 |
受信したビジョンポイントの数。 |
レジスタ番号 3 |
受信したステータスコード。 |
ワーク変更時レシピの切り替え
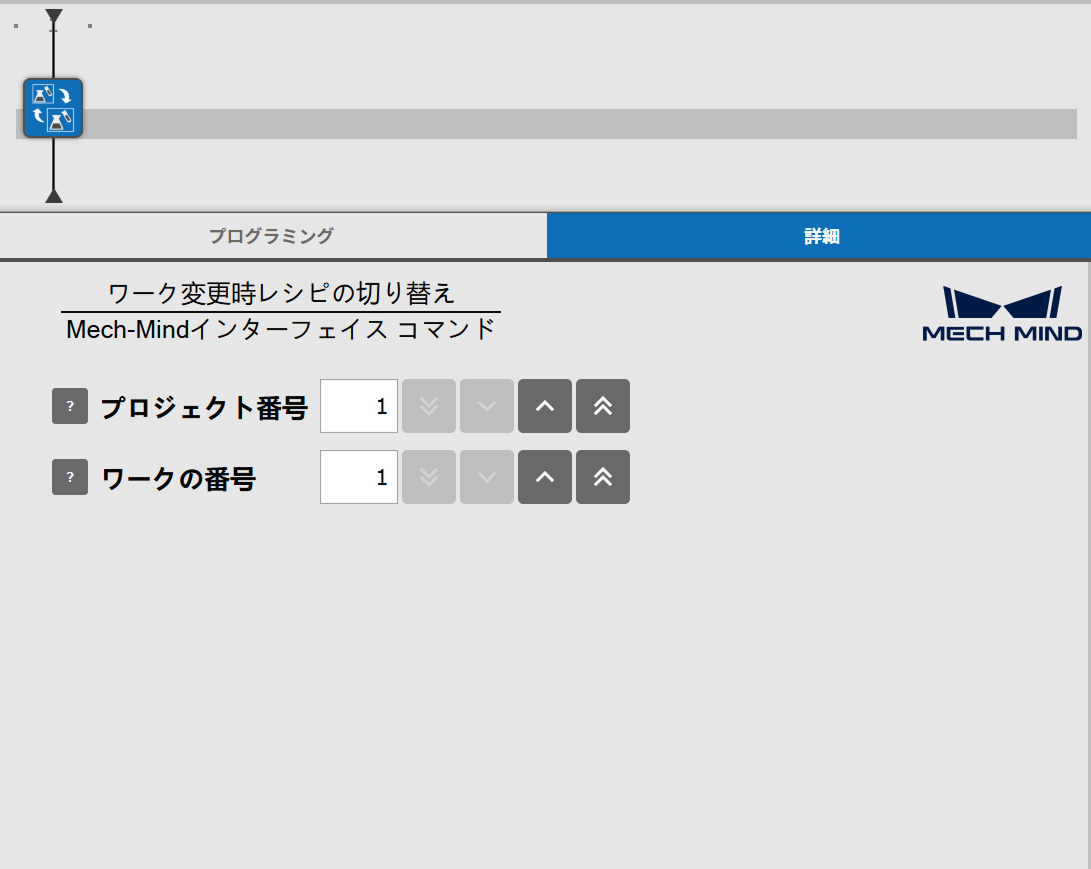
このコマンドは、Mech-Visionプロジェクトのパラメータレシピを切り替えるために使用されます。Mech-Visionでパラメータレシピがすでに設定・保存されている必要があり、またこのコマンドは Mech-Vision起動 の前に使用する必要があります。
パラメータ説明
| パラメータ | 説明 |
|---|---|
プロジェクト番号 |
Mech-Visionのプロジェクト番号。Mech-Visionのプロジェクトリストで確認可能で、プロジェクト名の前に表示される数字がプロジェクト番号を表します。 |
ワークの番号 |
Mech-Visionプロジェクトに設定されたレシピ番号。 |
外部からMech-Visionに箱サイズを設定
このコマンドは、Mech-Visionプロジェクト内の「対象物の寸法を読み込む」ステップに対して、対象物の寸法を外部から入力するために使用されます。

パラメータ説明
| パラメータ | 説明 |
|---|---|
プロジェクト番号 |
Mech-Visionのプロジェクト番号。Mech-Visionのプロジェクトリストで確認可能で、プロジェクト名の前に表示される数字がプロジェクト番号を表します。 |
長さ |
対象物の長さの設定値。 |
幅 |
対象物の幅の設定値。 |
高さ |
対象物の高さの設定値。 |
Mech-Viz起動
このコマンドは、Mech-Vizプロジェクトを実行するために使用されます。
パラメータ説明
| パラメータ | 説明 |
|---|---|
位置姿勢のタイプ |
各軸:ロボットの現在の関節角度をMech-Vizに送信して、ロボットの動作と初期位置を同期させます。
|
Mech-Vizに位置姿勢請求
このコマンドは、Mech-Vizプロジェクトの実行結果を受信するために使用されます。Mech-Viz起動 の後に使用する必要があります。

パラメータ説明
| パラメータ | 説明 | ||
|---|---|---|---|
戻り値のタイプ |
各軸:経路点の関節角度値。
|
||
レジスタ番号 1 |
1:Mech-Vizデータ送信完了。
|
||
レジスタ番号2 |
受信した経路点の数。
|
||
レジスタ番号 3 |
経路内における把持点のインデックス。 |
||
レジスタ番号 4 |
受信したステータスコード。 |
Mech-Vizのブランチ設定
このコマンドは、Mech-Vizプロジェクトの「メッセージによって異なる分岐を実行」ステップに出口番号を設定するために使用されます。
パラメータ説明
| パラメータ | 説明 |
|---|---|
ブランチの名前 |
「メッセージによって異なる分岐を実行」ステップの番号に対応する値。 |
ブランチの出力ポート |
指定された分岐の出口番号。Mech-Vizプロジェクトはこの出口に沿って実行を継続します。範囲は[1~99]です。 |
Mech-Vizのインデックス設定
リストによる移動、グリッドによる移動、事前計画パレットパターン、カスタマイズのパレットパターンなど、インデック機能を持つ移動ステップは、このコマンドを呼び出すことでインデックス値を設定することができます。
パラメータ説明
| パラメータ | 説明 |
|---|---|
移動スキルの名前 |
ステップの番号が対応する値。 |
インデックス |
設定されたインデックス値。この値は、Mech-Vizで表示される現在のインデックス値に1を加えた値となります。 |
フランジ位置姿勢を取得
このコマンドは、Mech-Visionのビジョン結果に含まれる特定のビジョンポイント、またはMech-Vizの移動経路に含まれる特定の経路点を、指定の位置姿勢変数に転送して保存するために使用されます。複数のビジョンポイントや経路点を取得したい場合は、このコマンドを複数回使用し、それぞれのコマンドでレジスタ番号を変更してください。
パラメータ説明
| パラメータ | 説明 |
|---|---|
レジスタ番号 |
ユーザーが指定した正の整数値を「位置番号」として使用し、何番目のビジョン把持点を保存するかを指定します。 |
位置レジ番号 |
ユーザーが指定した把持点の座標を、指定されたPR(位置レジスタ)に保存します。 |
レジスタ番号 1 |
ユーザーが指定した把持点のラベルを、指定されたR レジスタ 1に保存します。 |
レジスタ番号 2 |
ユーザーが指定した把持点の移動速度を指定されたR レジスタ 2に保存します。その値は常に0です。 |
各軸データを取得
このコマンドは、Mech-Vizが返す移動経路内の特定の経路点の関節角度データを、指定された位置姿勢変数に保存するために使用されます。複数の経路点の関節角度データを取得したい場合は、このコマンドを複数回使用し、「取得位置姿勢の番号」を変更してください。
パラメータ説明
| パラメータ | 説明 |
|---|---|
レジスタ番号 |
ユーザーが指定した正の整数値を「位置番号」として使用し、何番目のビジョン把持点を保存するかを指定します。 |
位置レジ番号 |
ユーザーが指定した経路点の関節角度の値を、指定されたPR(位置レジスタ)に保存します。 |
レジスタ番号 1 |
ユーザーが指定した経路点のラベルを、指定されたR レジスタ 1に保存します。 |
レジスタ番号 2 |
ユーザーが指定した経路点の移動速度を指定されたR レジスタ 2に保存します。 |