標準インターフェース通信設定
以下では、UR Eシリーズロボット(Polyscope X 10.4以上)にURCapプラグインをインポートし、Mech-Mindビジョンシステムとロボット間の標準インターフェース通信の設定方法について説明します。
ハードウェアとソフトウェアのバージョンを確認
-
ロボットがUR Eシリーズであることを確認します。
-
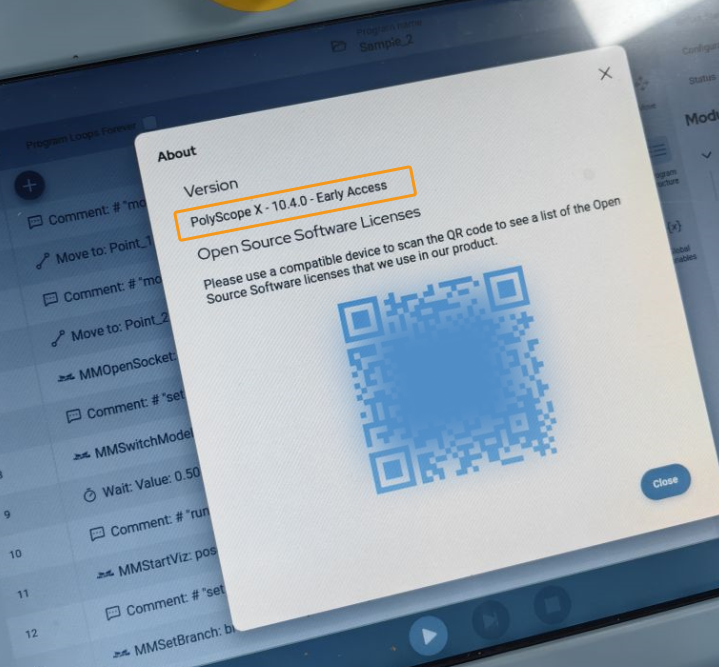
PolyscopeがXシリーズであり、バージョンが10.4以上であることを確認します。
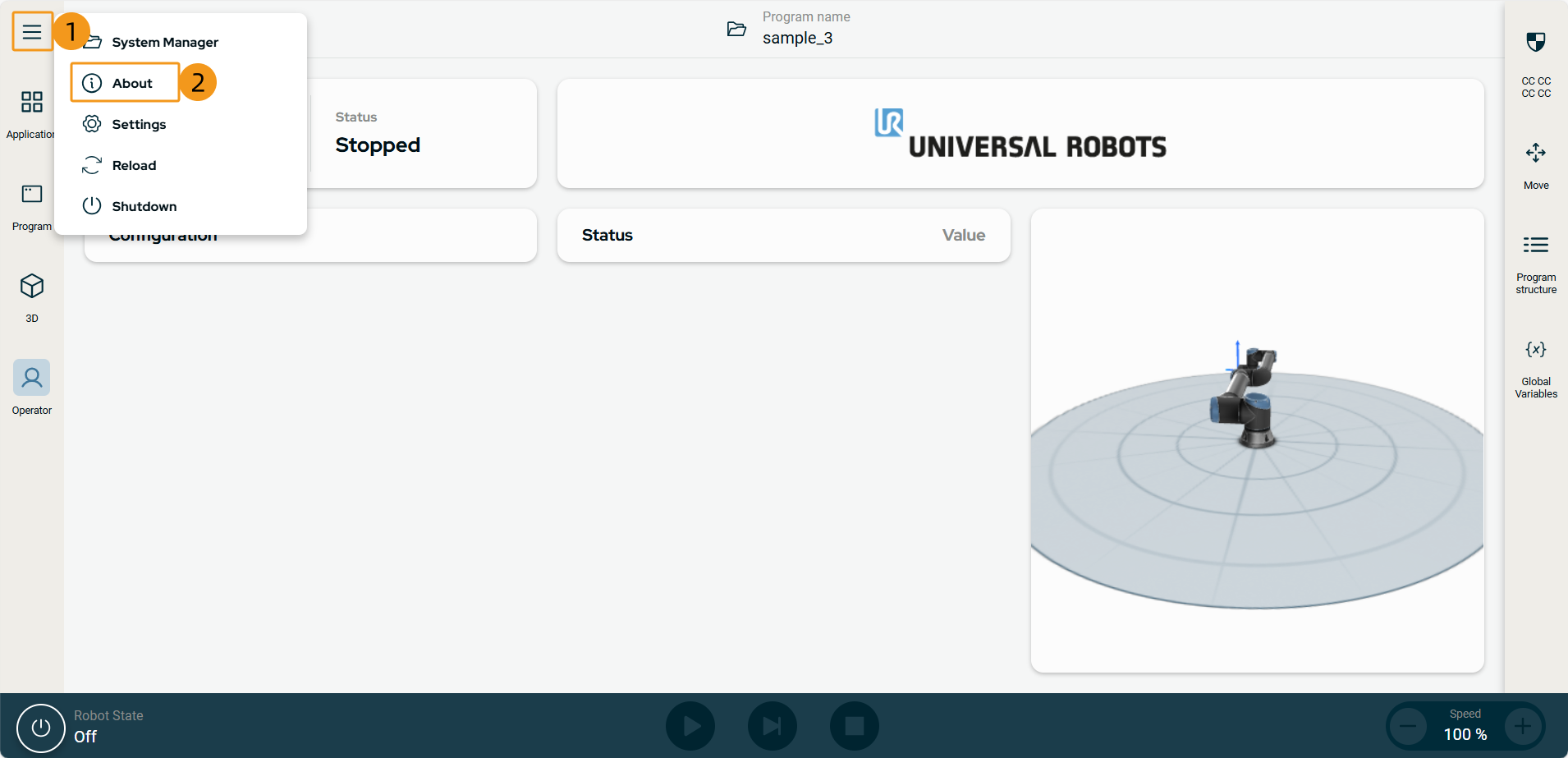
(クリックして展開)詳細方法
-
ティーチペンダント左上のメニューをクリックし、About を選択します。
-
PolyscopeがXシリーズであり、バージョンが10.4以上であることを確認してください。
-
ネットワーク接続を確立
IPアドレスを設定
-
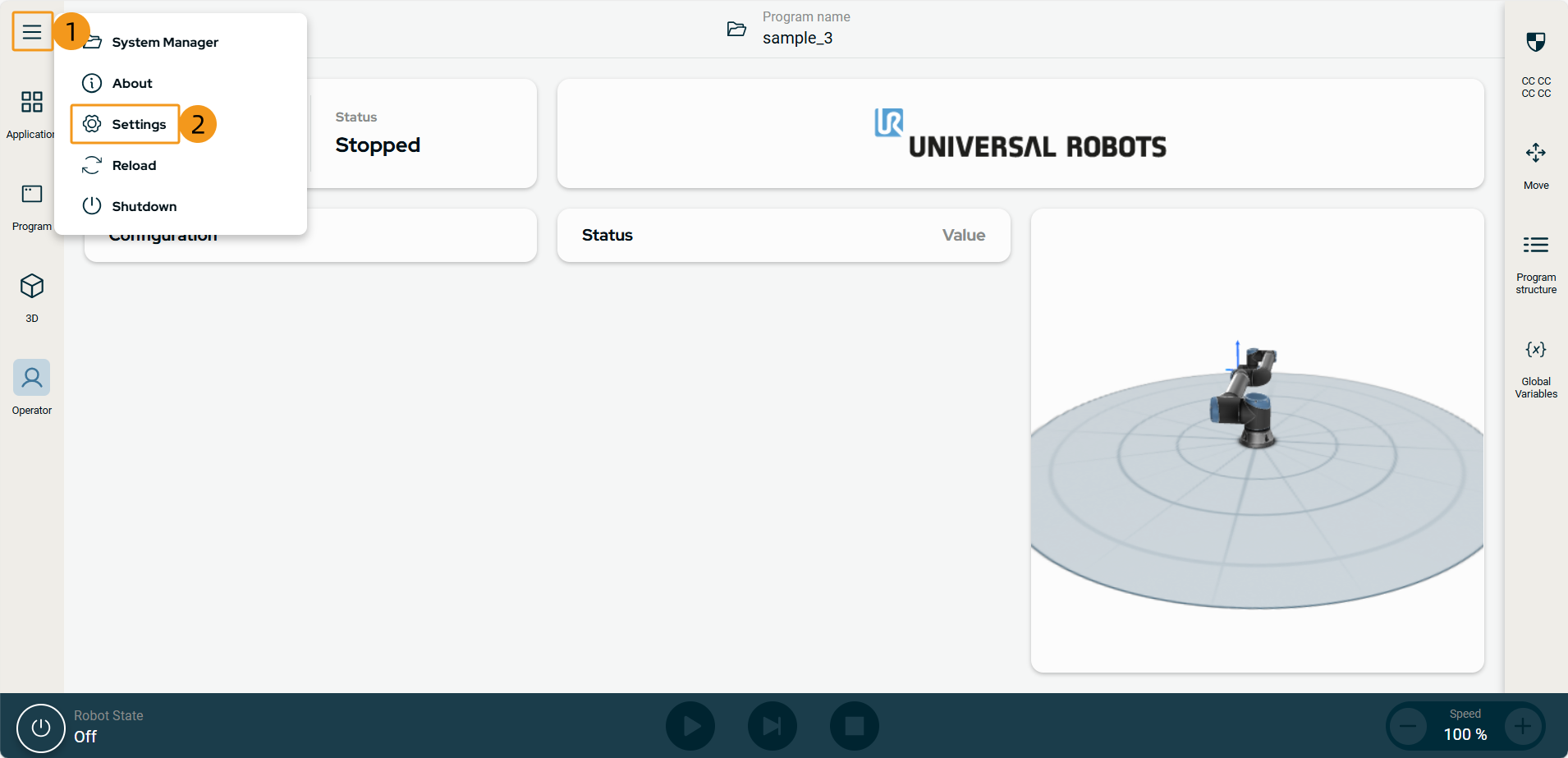
ティーチペンダント左上のメニューをクリックし、Settings を選択します。
-
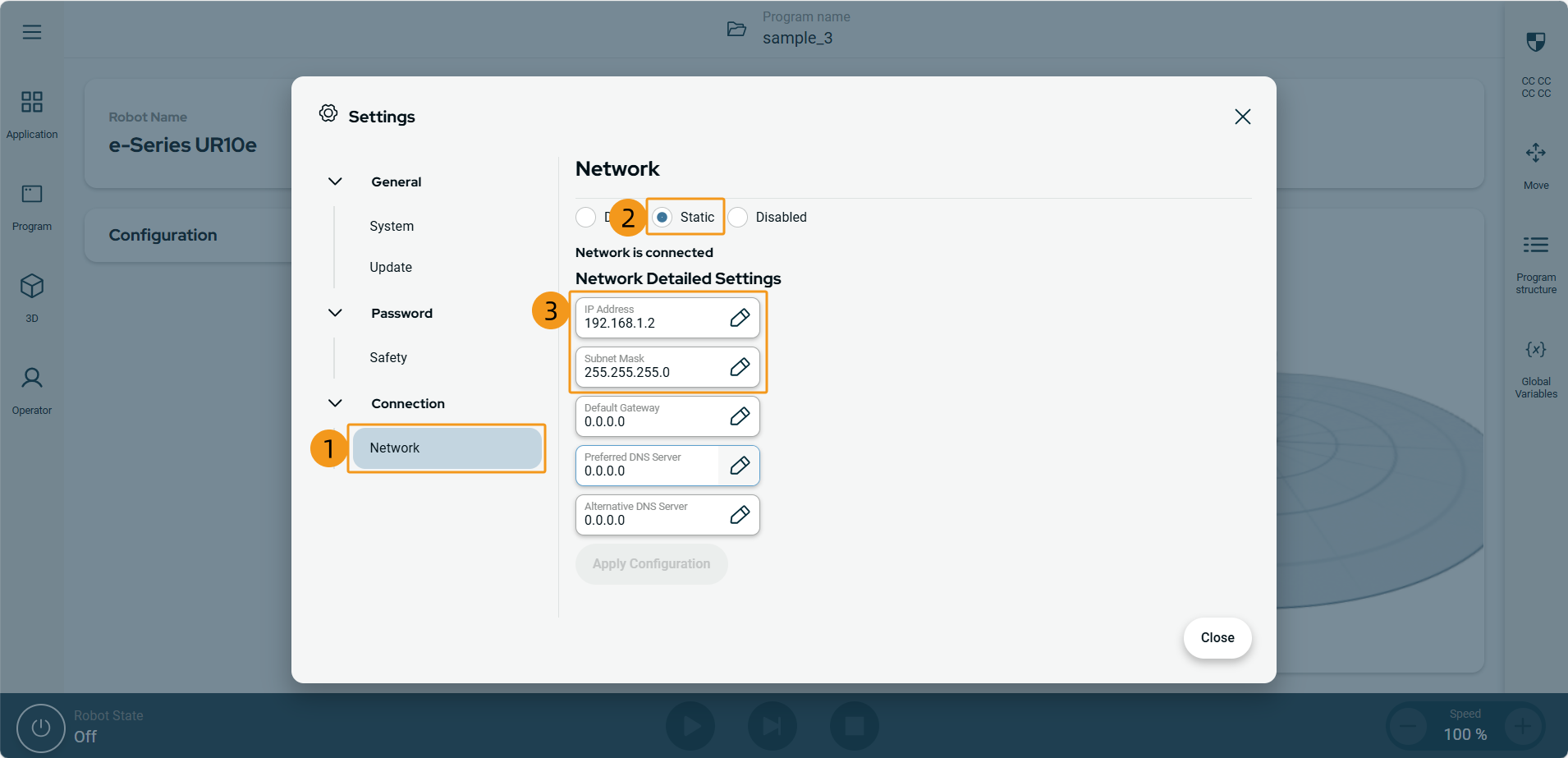
を順に選択し、Static を選択した上で、IP Address と Subnet Mask をそれぞれ編集して設定します。設定完了後、IP Address と Subnet Mask の下に設定値が表示されます。
-
IPCのIPアドレスを設定 します。
IPCのIPアドレスは、ロボットのIPアドレスと同じネットワークセグメントにある必要があります。つまり、両方のIPアドレスのネットワーク部分とサブネットマスクが同じである必要があります。例えば、192.168.100.169/255.255.255.0と192.168.100.170/255.255.255.0は同じネットワークセグメントにあります。
「ロボット通信設定」を実行
-
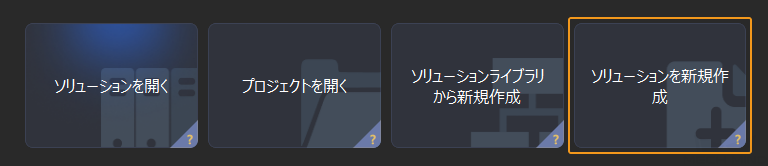
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
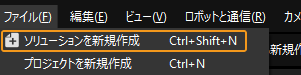
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 ドロップダウンリストから 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
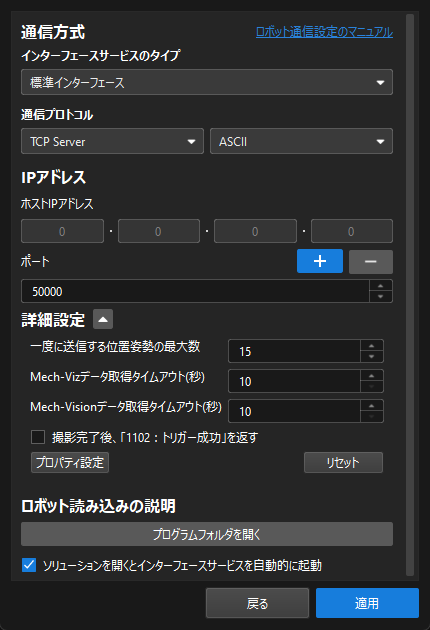
通信方式 の画面で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を ASCII に選択します。
-
詳細設定 を展開し、一度に送信する位置姿勢の最大数 を 15 に設定します。
-
ポート番号を50000(固定値、変更不可)に設定します。設定したポート番号が他のプログラムに使用されていないことを確認してください。
-
ロボット読み込みの説明 の下で、プログラムフォルダを開く をクリックします。
その後、読み込みファイルはこのフォルダからコピーされますので、フォルダウィンドウを閉じないようにしてください。 -
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-
-
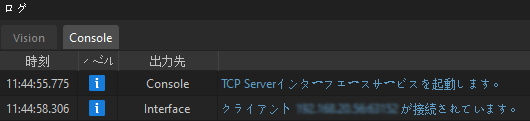
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
URCapプラグインをロボットにインポート
-
IPCで、読み込み用プログラムフォルダ(
UR_URCAPフォルダ)内のPolyscopeXフォルダにアクセスし、拡張子が.urcapxのファイルをUSBメモリの ルートディレクトリ にコピーします。-
読み込みプログラムフォルダは、Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある
Communication Component\Robot_Interface\Robot_Plugin\UR_URCAPパス内でも見つけることができます。 -
sampleフォルダはサンプルプログラムファイルです。ユーザーは本文の操作手順を参考にして、サンプルプログラムファイルをロボットにインポートすることができます。
-
-
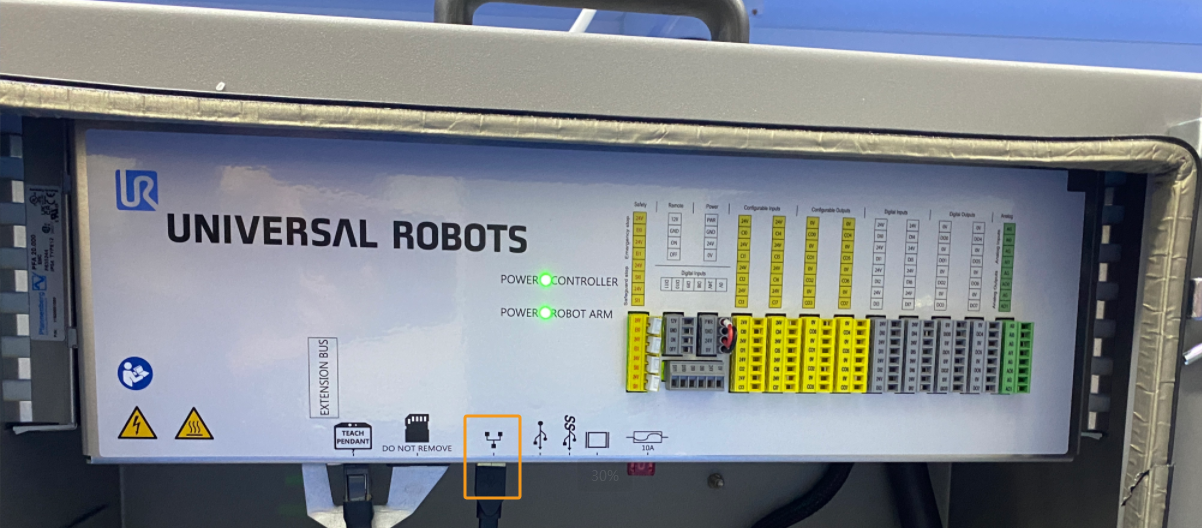
USBメモリをロボットのティーチペンダントのUSBポートに挿入します。
-
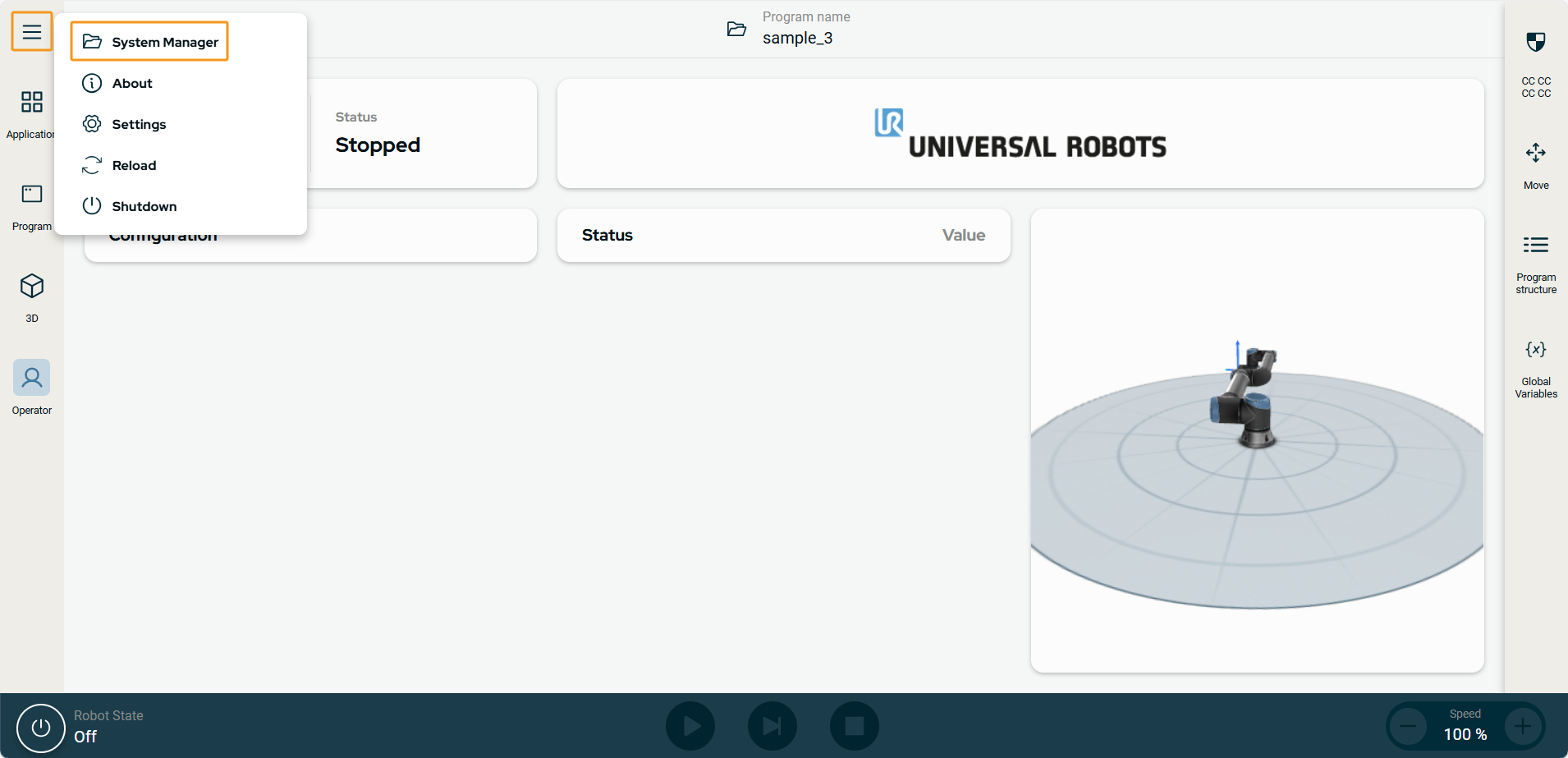
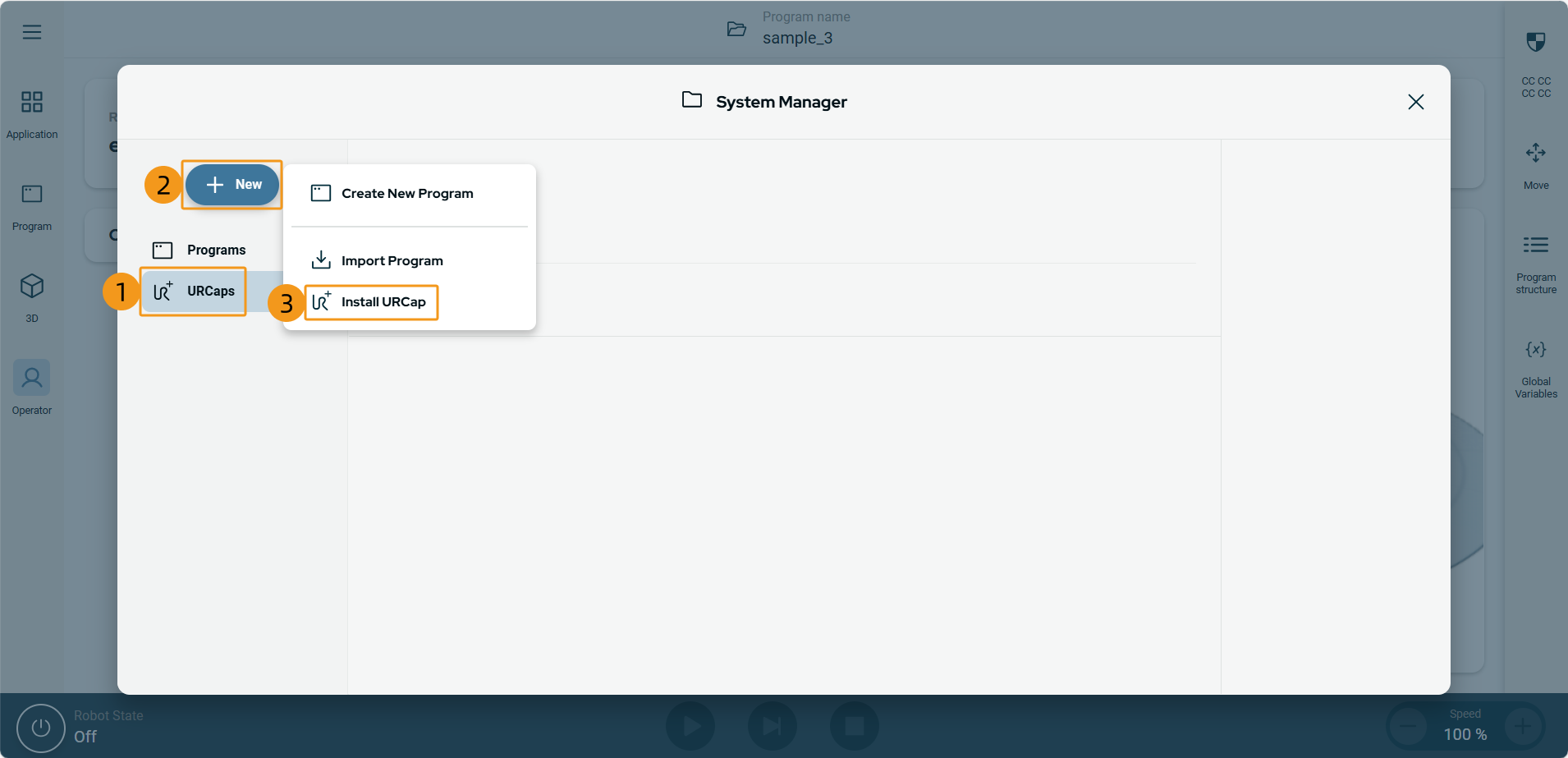
左上メニューをクリックし、System Manager を選択します。
-
を順にクリックします。
-
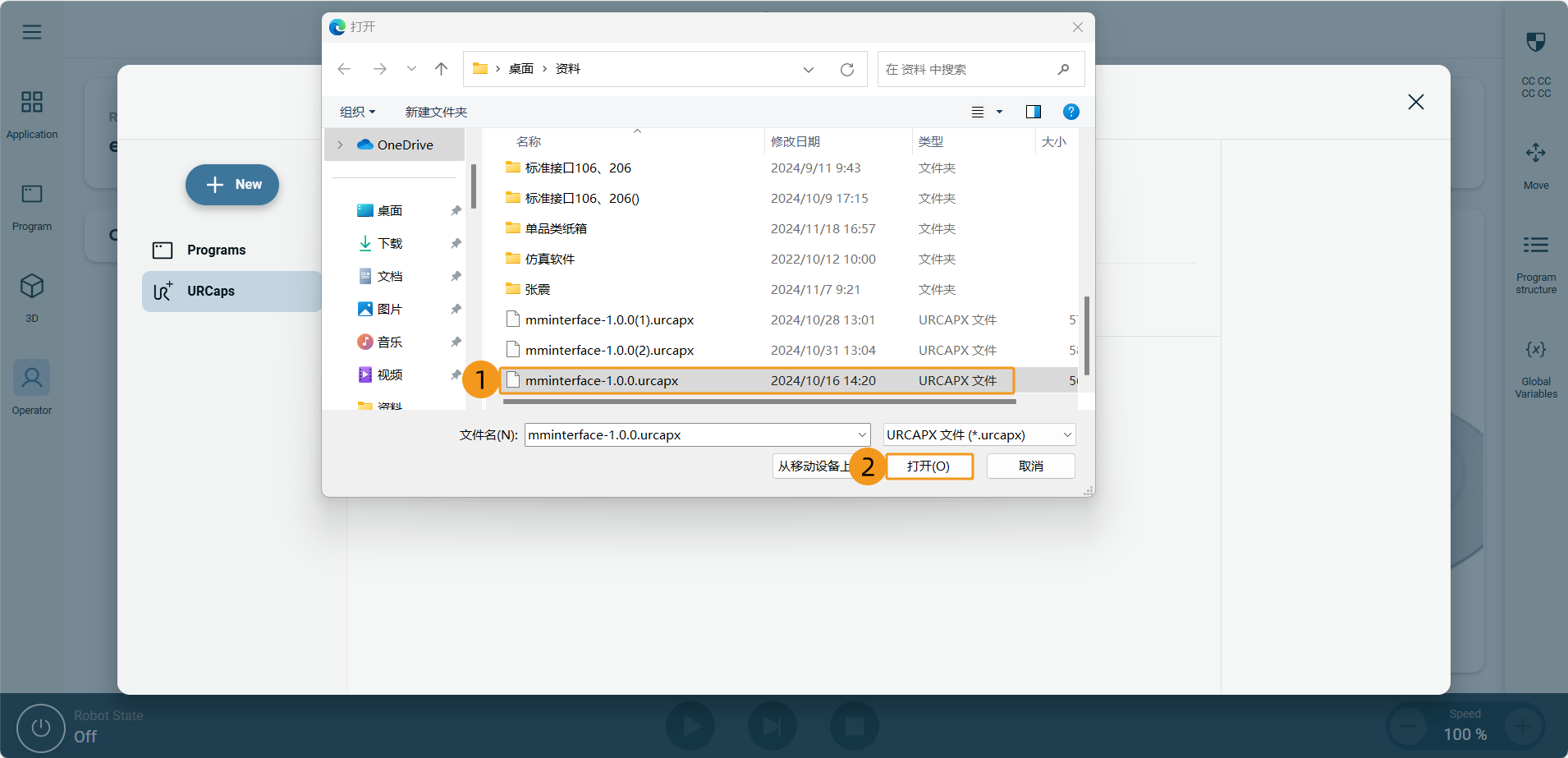
ファイル選択画面でUSBルートディレクトリ内の .urcapx ファイルを選択し、Open をクリックします。
-
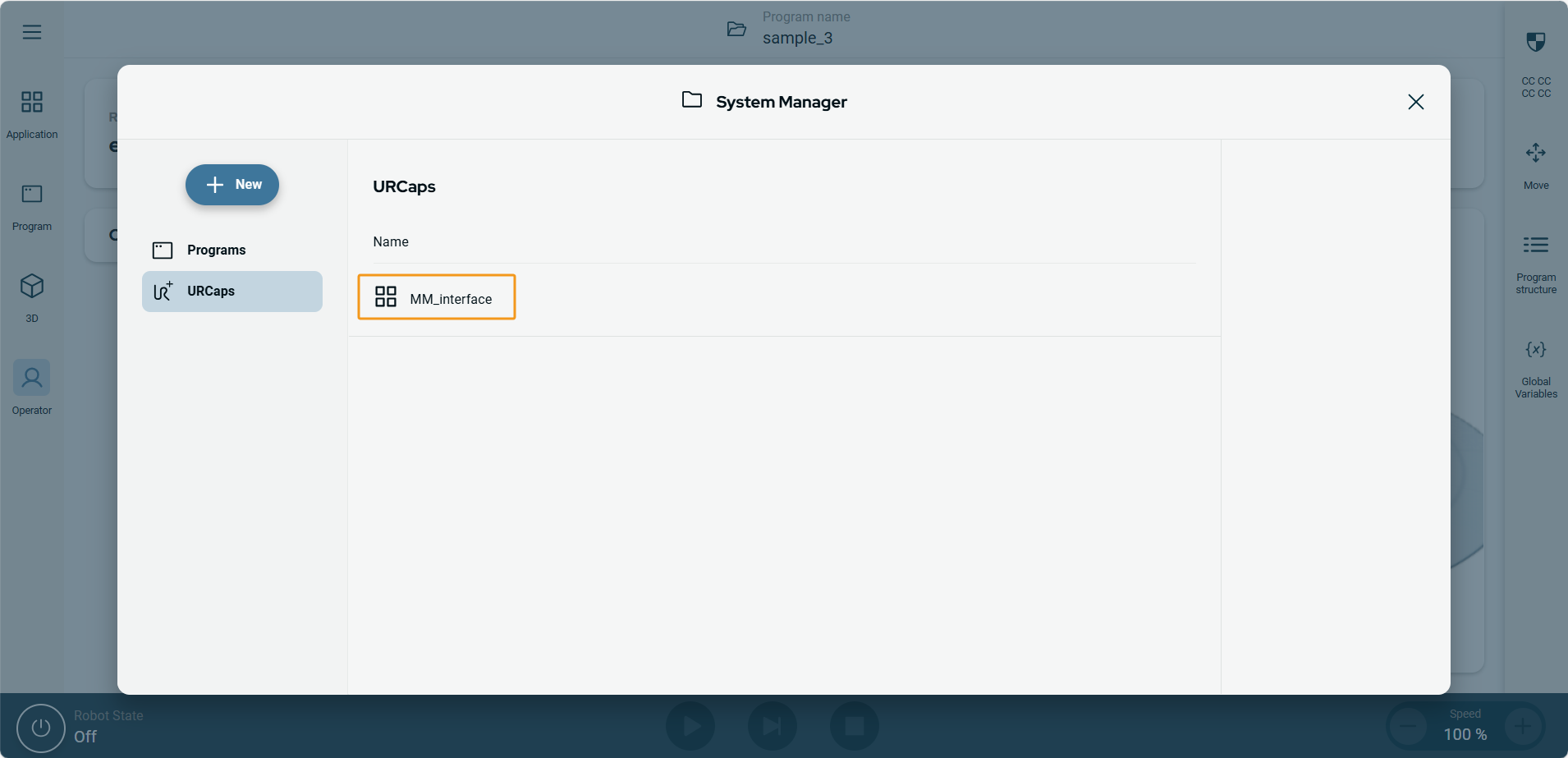
.urcapxファイルが正常に開かれれば、URCapプラグインのインポートは完了です。画面に MM_interface と表示されます。
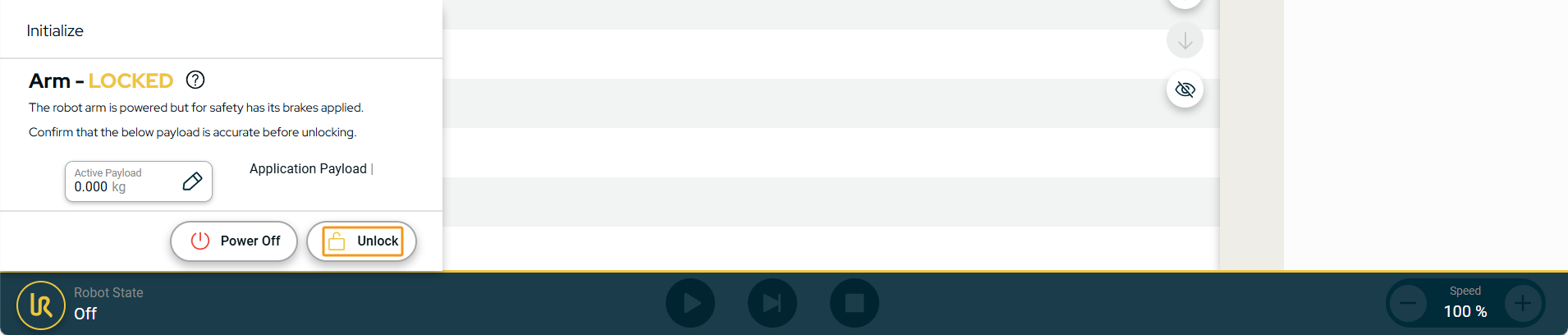
通信初期化
-
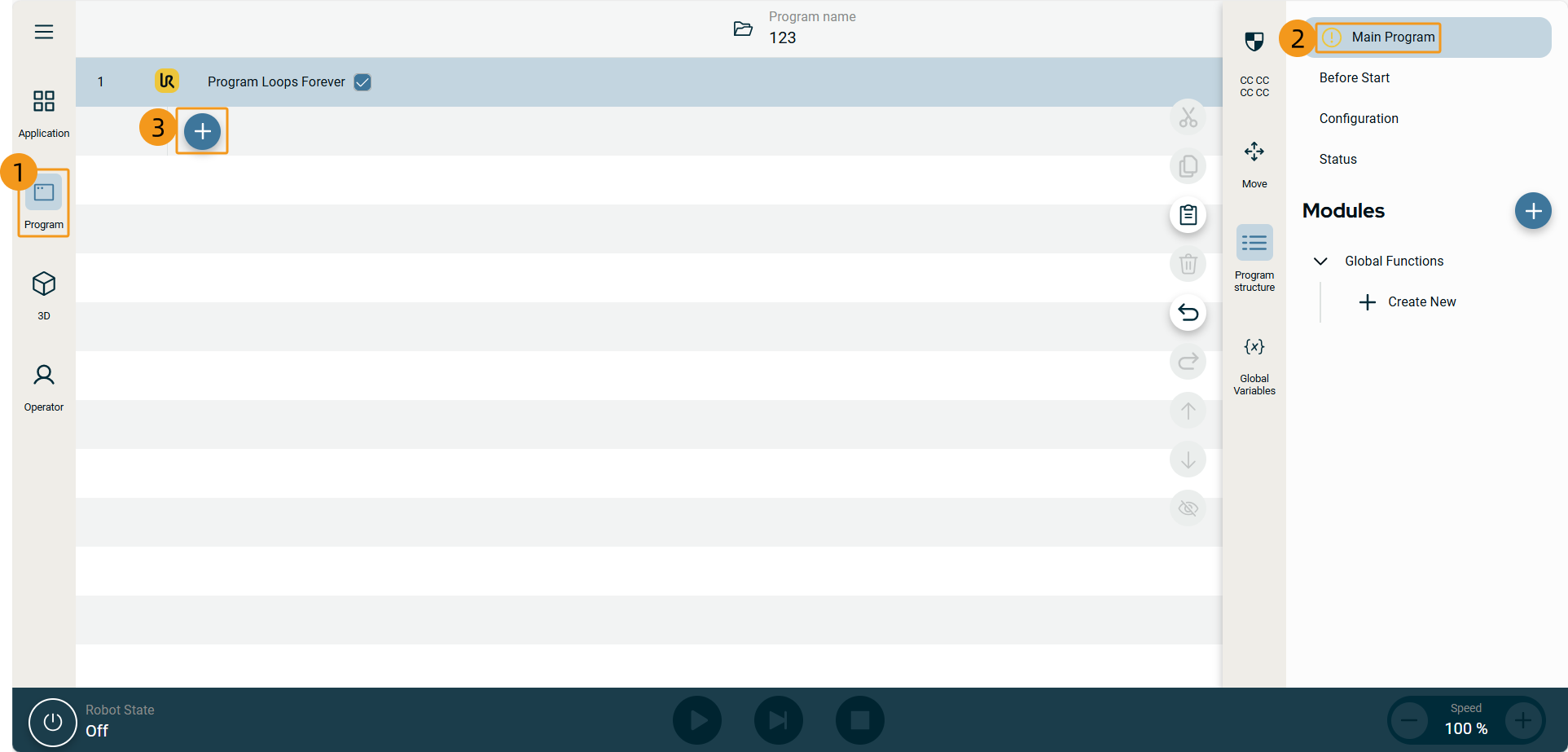
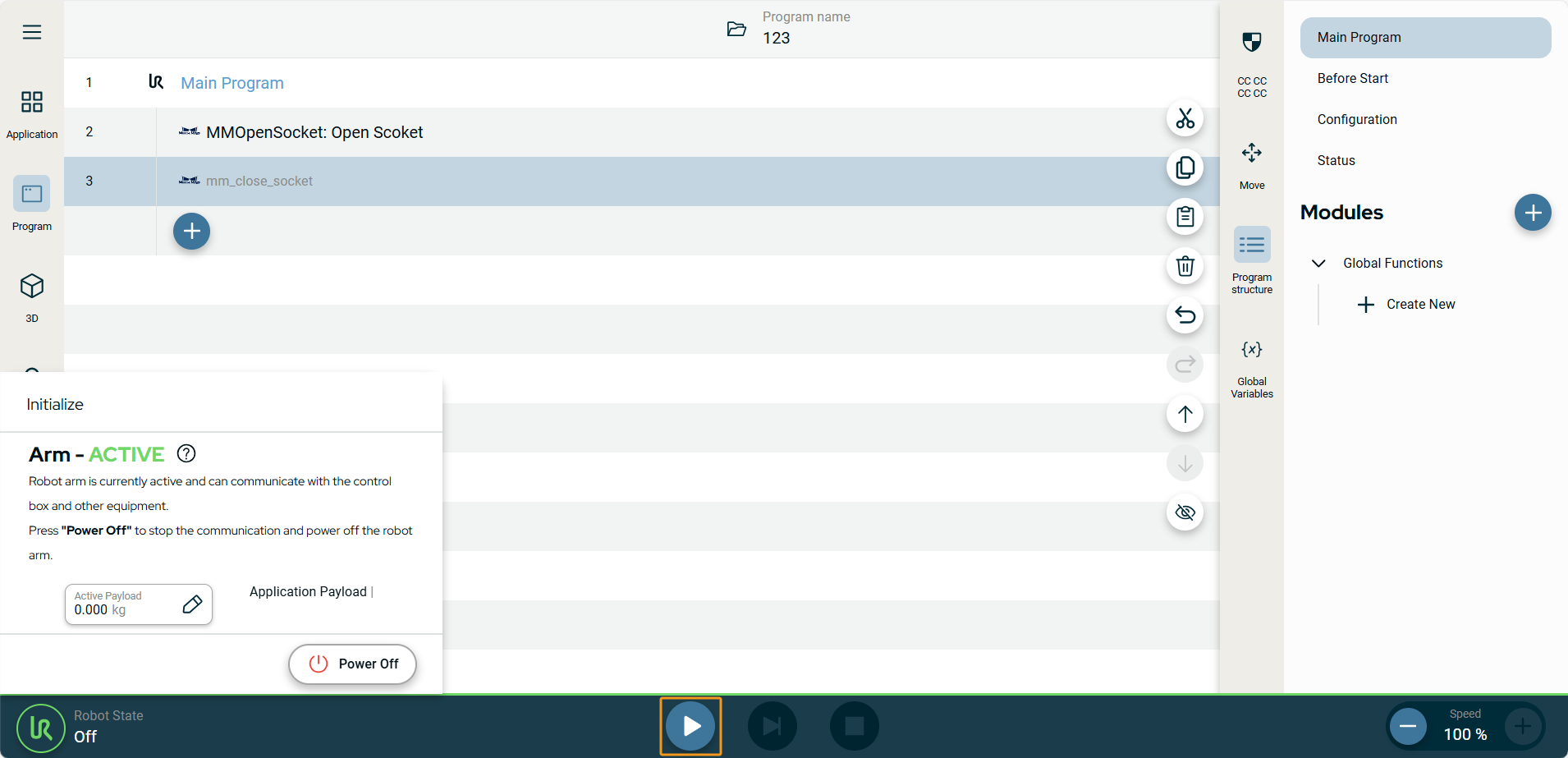
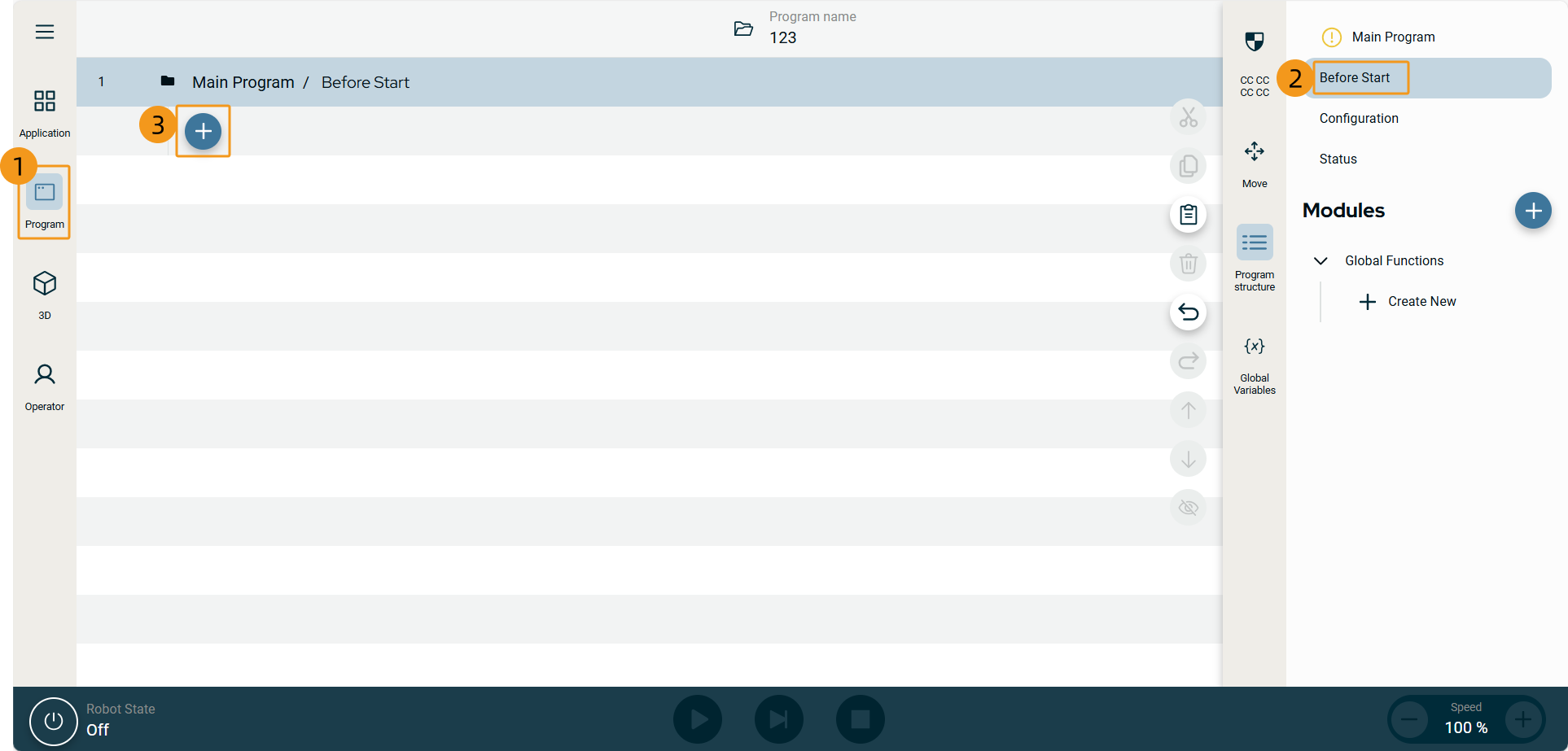
ティーチペンダントで を順にクリックします。
-
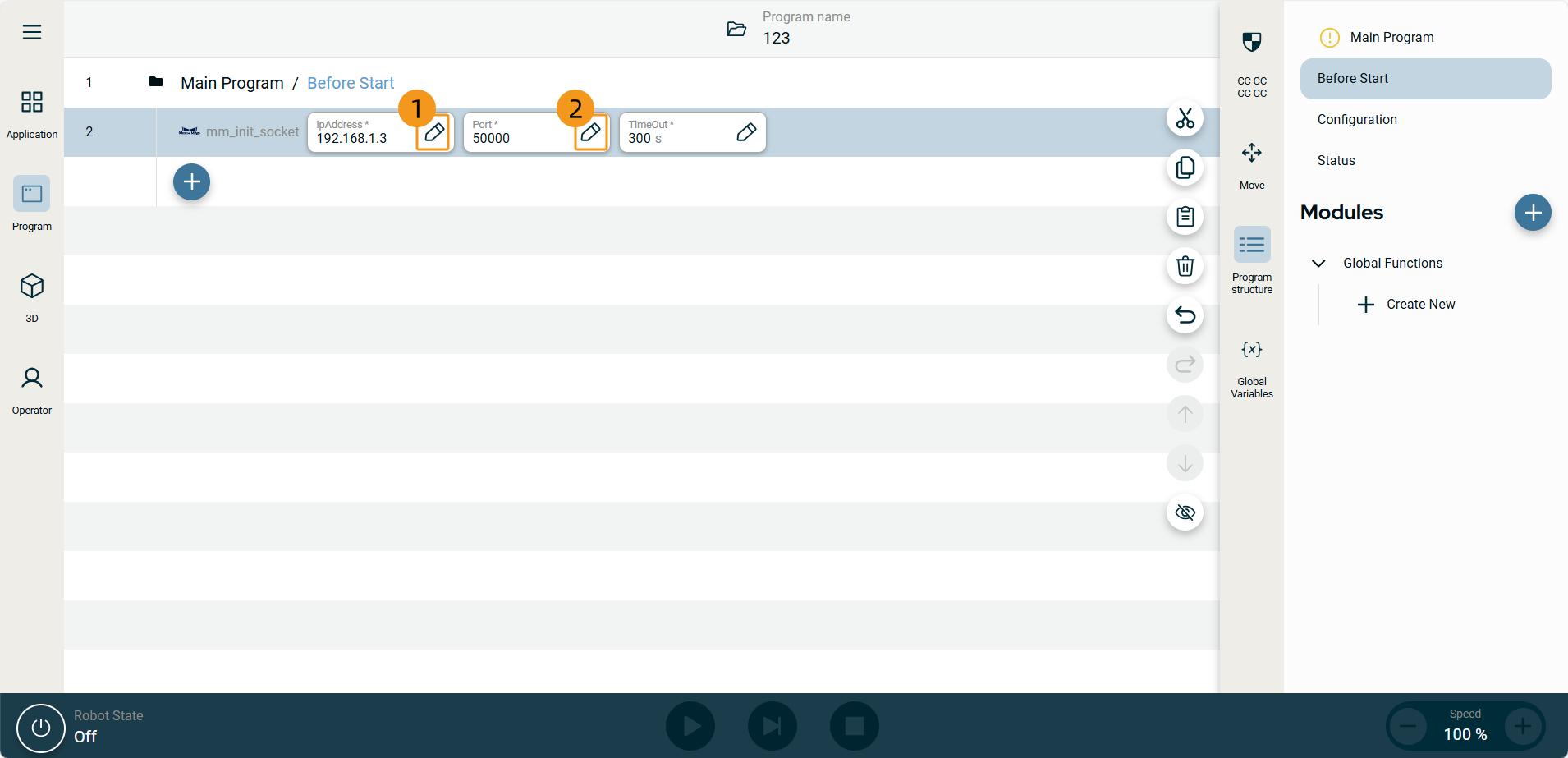
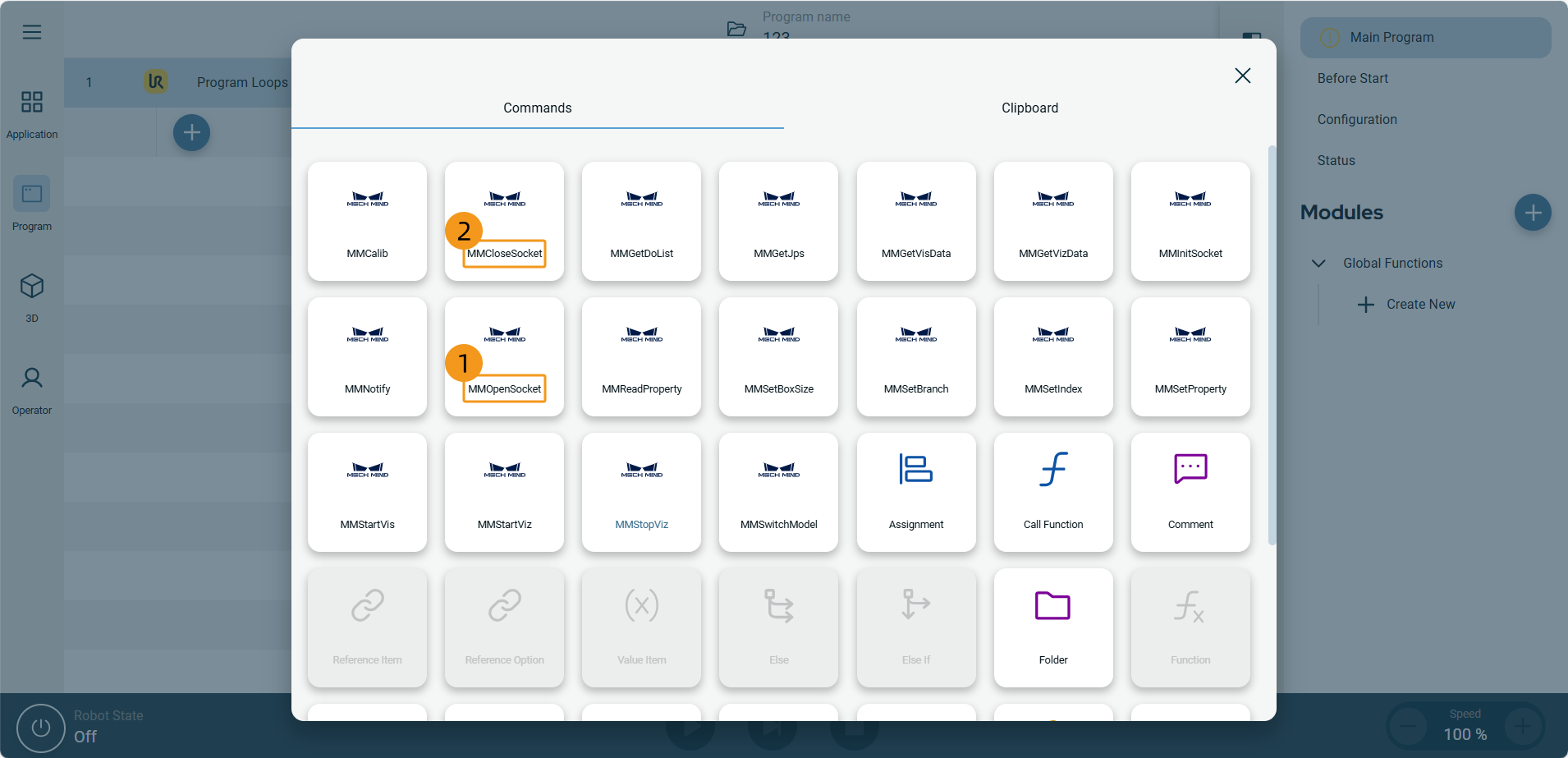
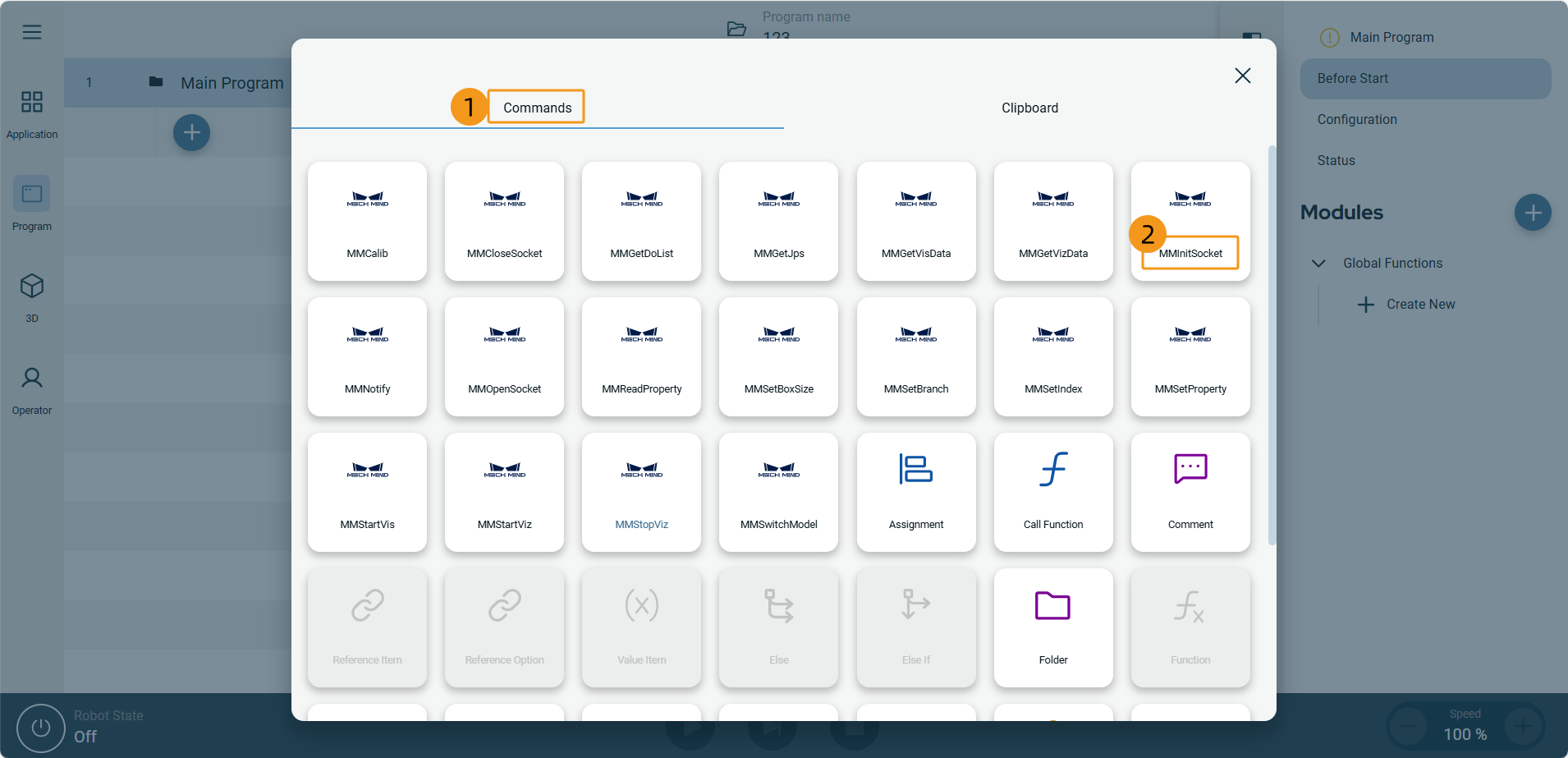
Commands から MMInitSocket を選択します。
-
表示された画面で、コマンド内の ipAddress をIPCのIPアドレスに、Port を 50000 に設定します(このポート番号はMech-Visionで設定されたホストポートと一致させる必要があります)。設定完了後、ipAddress と Port の下には設定したIPCのIPアドレスとポート番号が表示されます。