CRXプラグインによる自動キャリブレーション
以下では、CRXプラグインを使用して自動キャリブレーションを行う手順について説明します。
キャリブレーションプログラムの作成
-
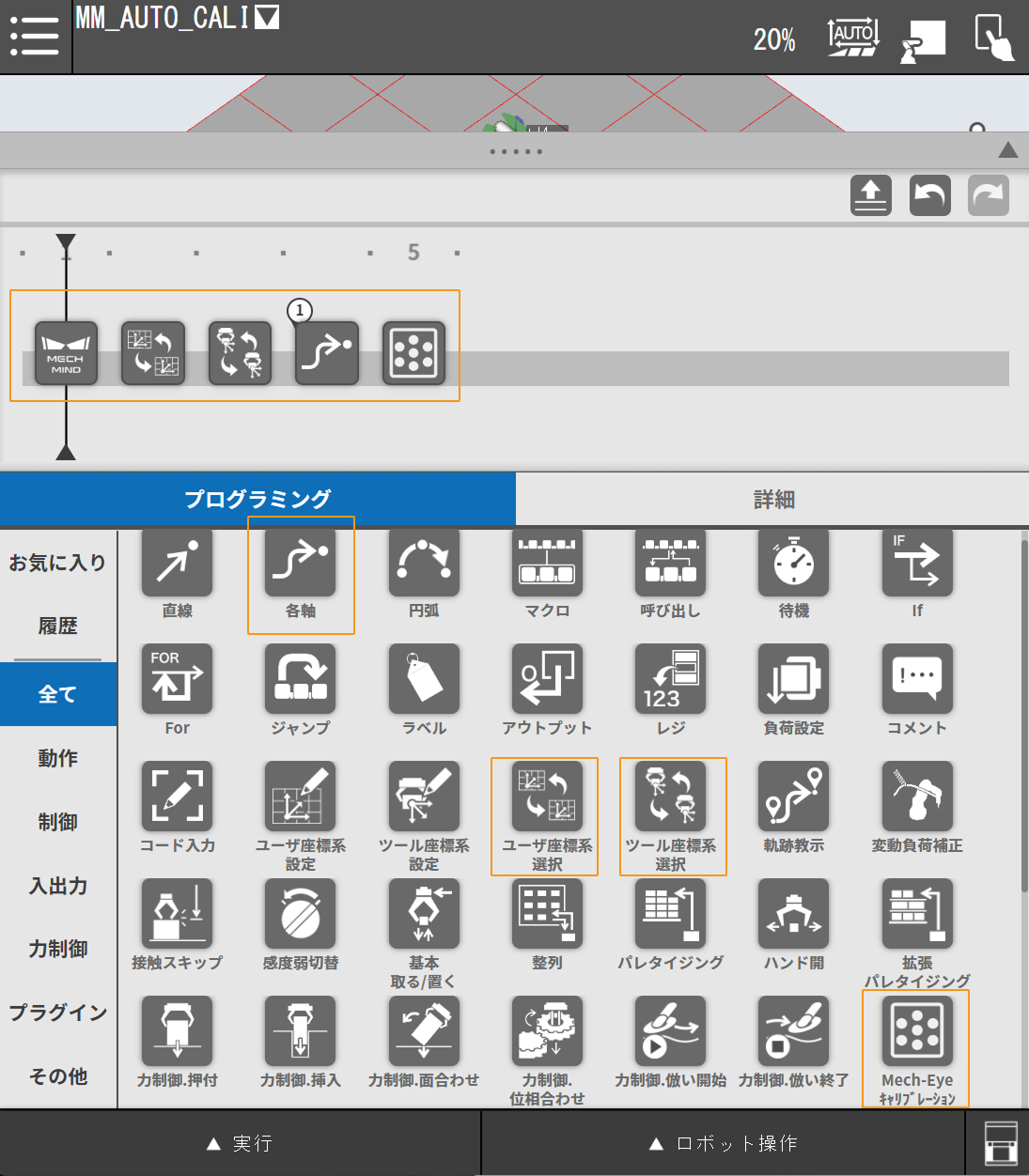
新しいロボットプログラム(本例ではMM_AUTO_CALI)を作成し、プログラミング を選択して、左側の 全て リストから以下のコマンドを順番にドラッグします:Mech視覚システム通信初期化設定、ユーザ座標系選択、ツール座標系選択、各軸、Mech-Eyeキャリブレーション。
-
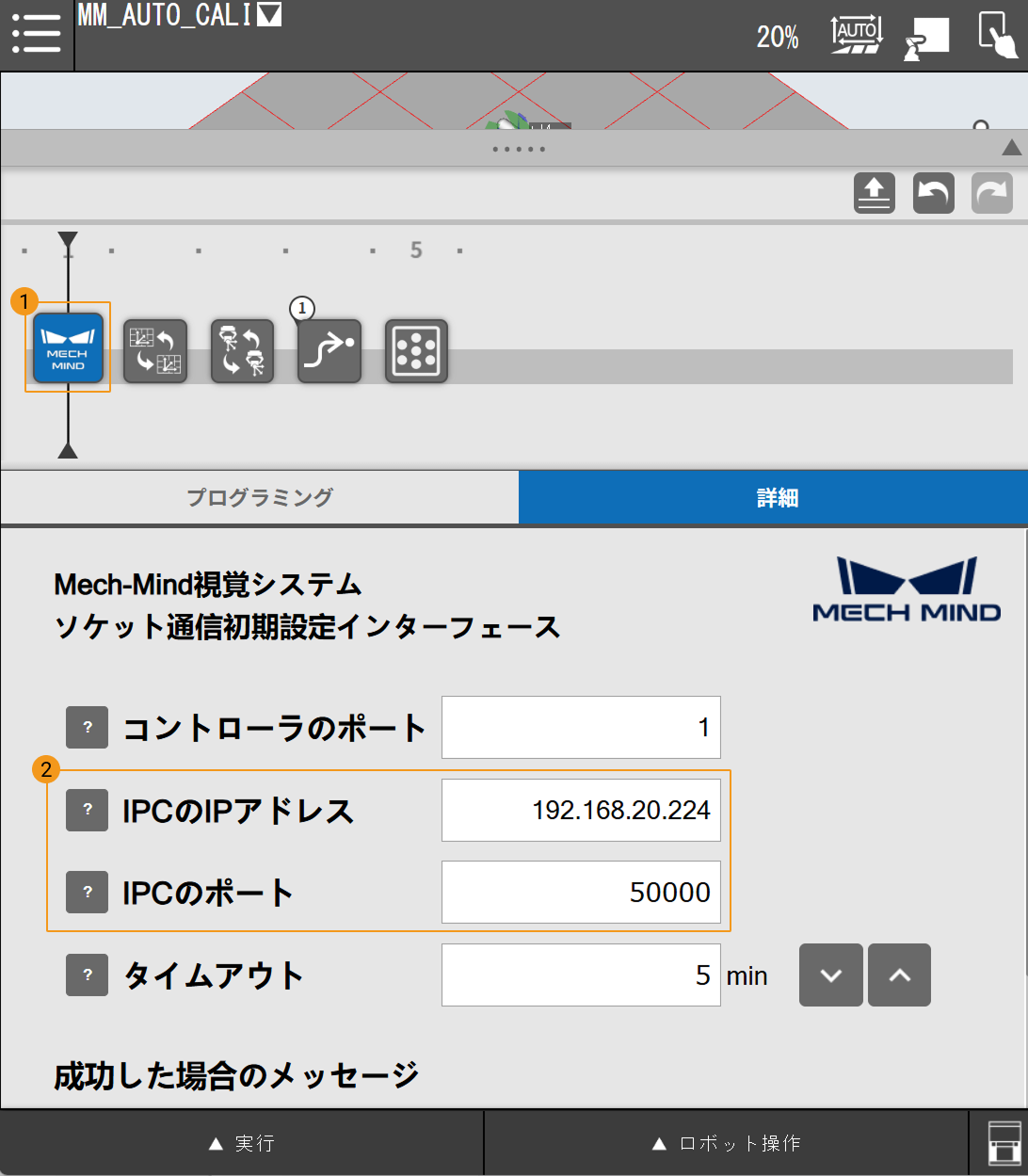
Mech視覚システム通信初期化設定 をクリックし、その詳細を表示します。ここでは、IPCのIPアドレス を使用中のIPCのIPアドレスに設定し、IPCのポート をMech-Visionで設定されたポート番号に設定します。
-
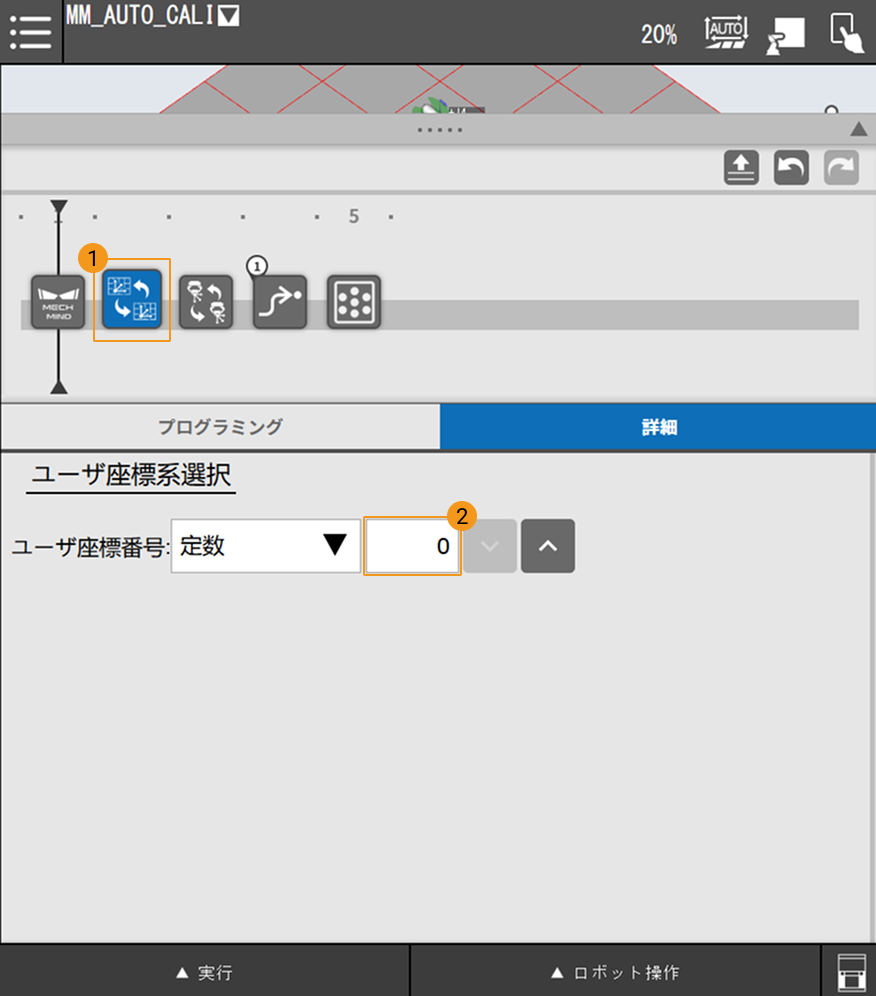
ユーザ座標系選択 をクリックし、ユーザ座標番号を 0 に設定します。
-
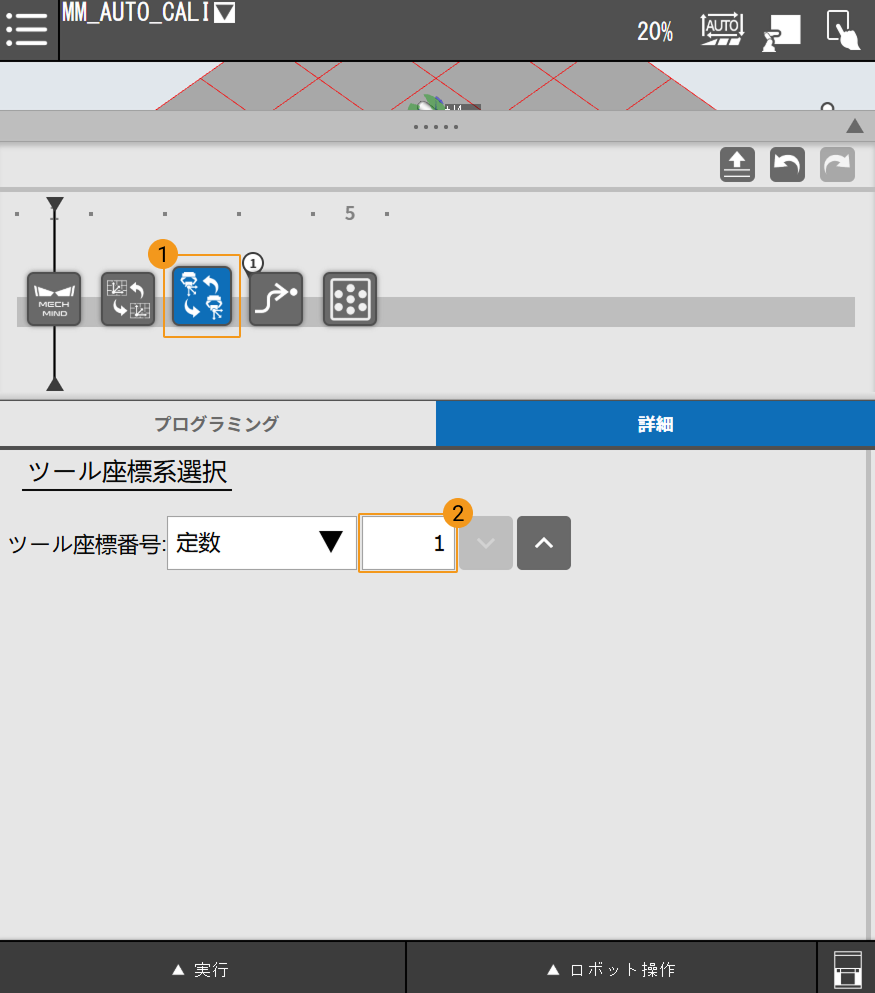
ツール座標系選択 をクリックし、ツール座標番号を 1 に設定します。
キャリブレーションの初期位置を設定
-
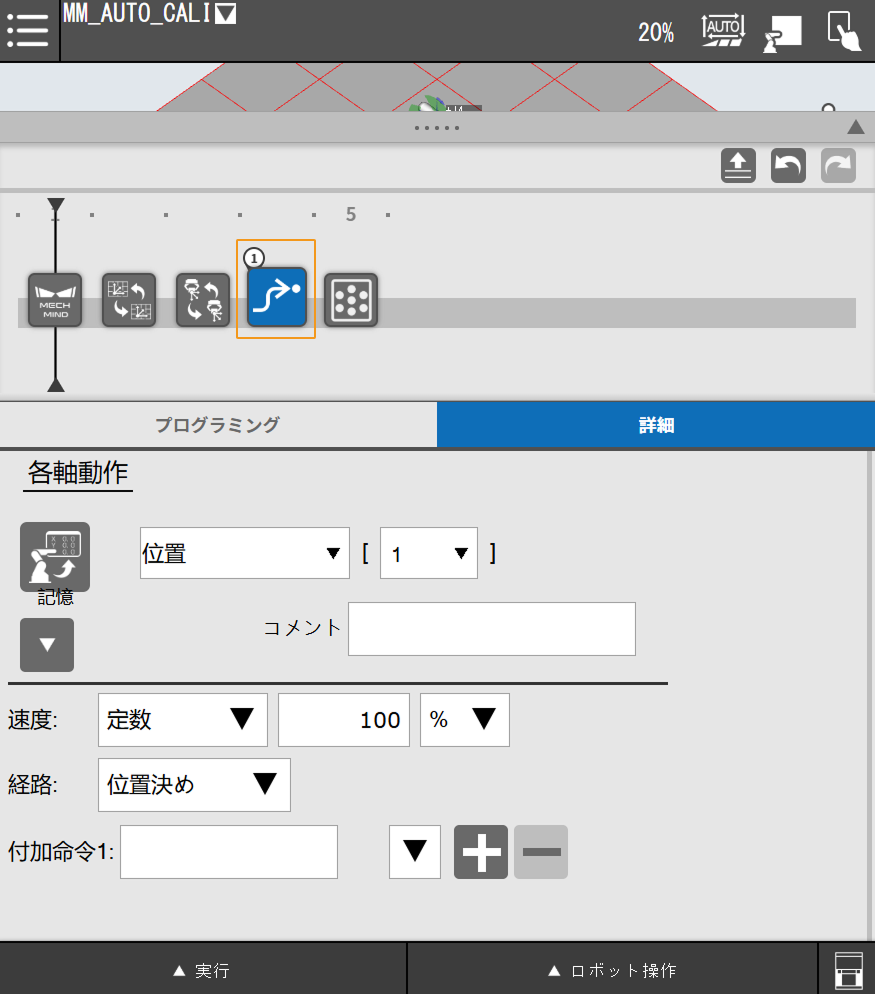
各軸 をクリックします。
-
ロボットを手動でキャリブレーションの開始位置に移動させます。自動キャリブレーションの開始点はキャリブレーション経路の最下層中央にあります。
-
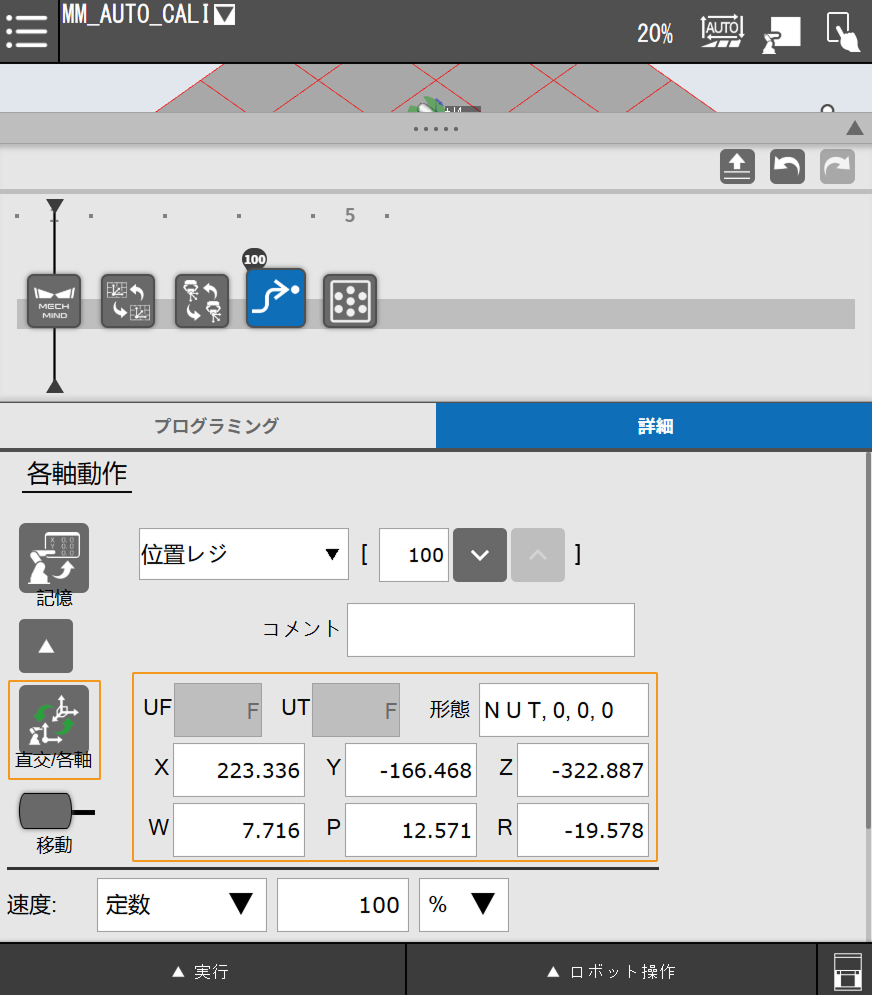
位置レジ を選択し、レジスタ番号を入力します。ここでは、100を使用します。
 をクリックして 直交/各軸 ボタンを表示させます。
をクリックして 直交/各軸 ボタンを表示させます。
-
直交/各軸 をクリックして「直交」に切り替えます。
-
記憶 をクリックするとダイアログが表示されるので、はい をクリックしてキャリブレーションの開始点を保存します。

-
-
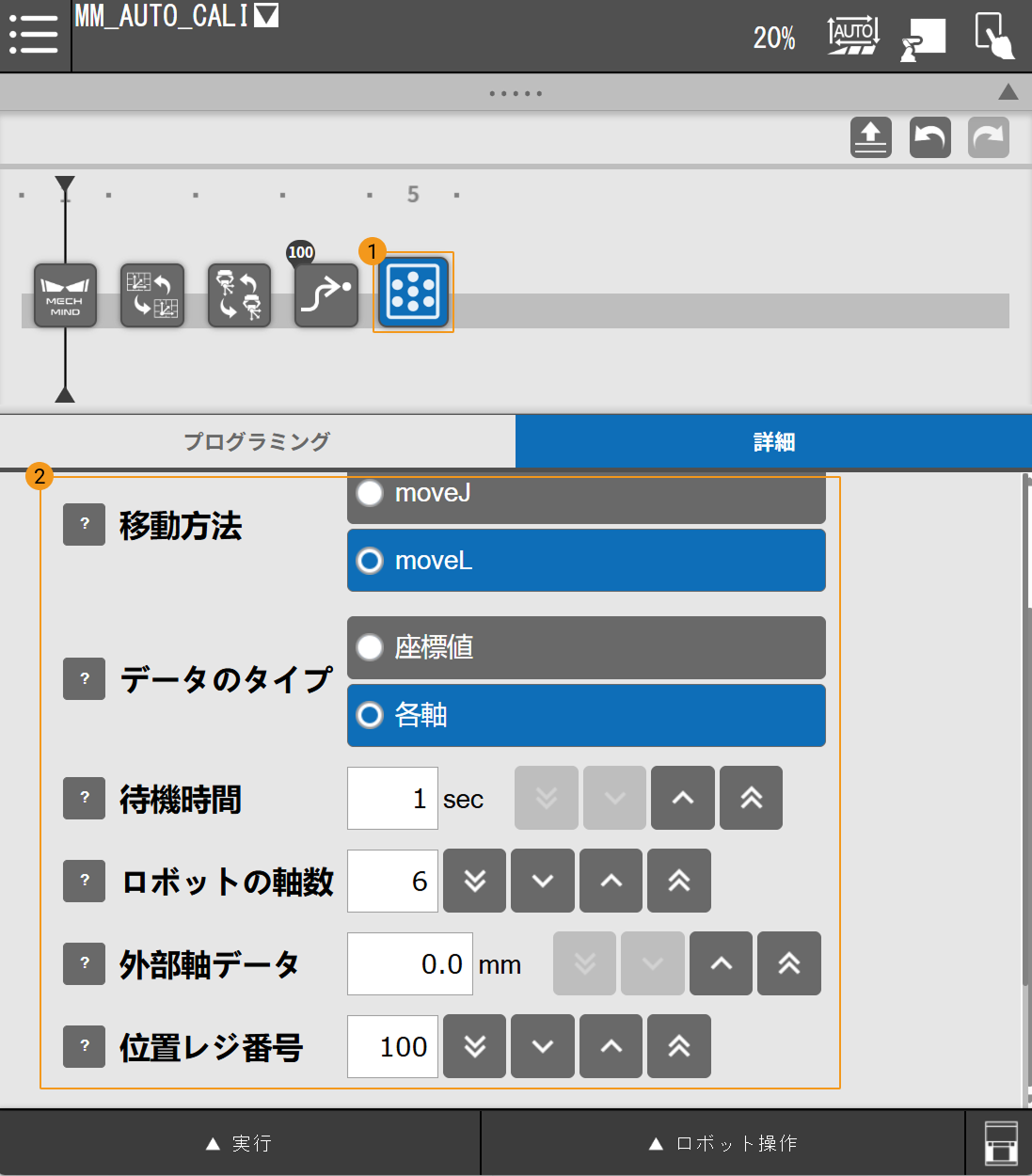
Mech-Eyeキャリブレーション をクリックし、下図に従って設定を行います。
-
移動方法:自動キャリブレーション中のロボットの動作モードを設定します。
-
データのタイプ:ロボットが送信する点の種類を設定します。
-
待機時間:撮影前の待機時間を設定します(ロボットの揺れを防止)。
-
位置レジ番号:前のステップで記憶したキャリブレーション開始点のレジスタ番号に設定する必要があります。
-
キャリブレーションプログラムを実行
-
自動モードに切り替え、左下の 実行 オプションをクリックし、速度を少し下げてから 実行 を再度クリックします。

-
Mech-Visionのログバーの コンソール タブに、「キャリブレーションプロセスに入ります。Mech-Visionでキャリブレーションを開始してください」と表示されます。
Mech-Visionでキャリブレーションを実行
-
Mech-Visionを起動し、カメラキャリブレーション をクリックしてキャリブレーションツールを起動します。
-
カメラの取り付け方式に応じて、ソフトウェアの指示に従って残りの操作を行います。
-
カメラの取り付け方式はEye to handの場合、 自動キャリブレーション(Eye to hand) をご参照ください。
-
カメラの取り付け方式はEye in handの場合、 自動キャリブレーション(Eye in hand) をご参照ください。
-
キャリブレーションが完了したら、把持プログラム を作成してFANUC CRXシリーズのロボットを制御し、ビジョンシステムによる把持と配置を実行します。