自動キャリブレーション
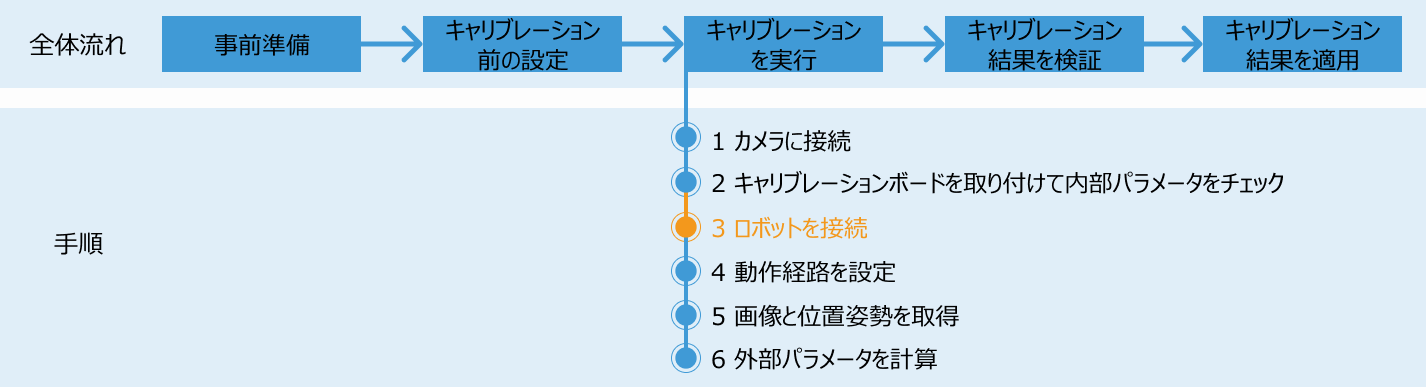
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
|
キャリブレーションを実行する前に、以下のことを確認してください。
|
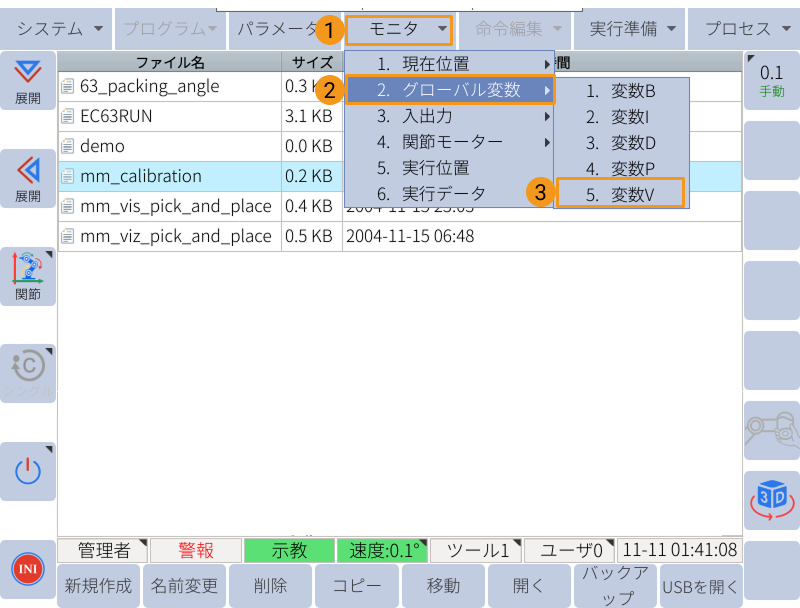
1. 変数を表示
キャリブレーションポイントのTCPはV099変数に保存され、対応する関節角度のデータはP099変数に保存されます。キャリブレーションを開始する前に、以下の指示に従ってV099、P099変数を開いてください。
-
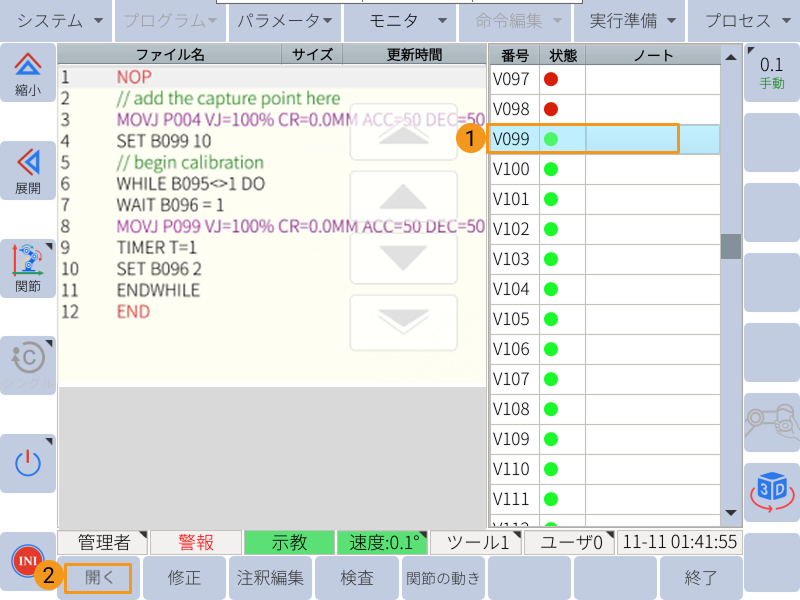
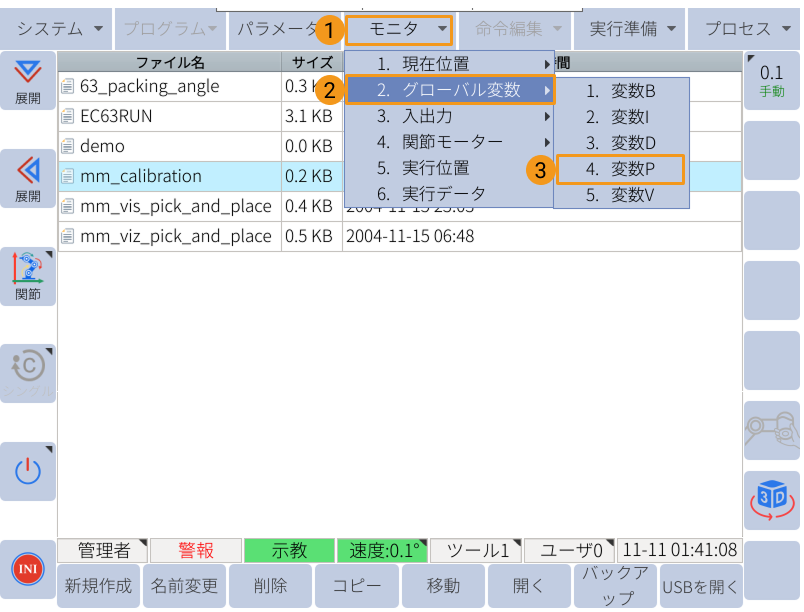
ティーチペンダントの の をタップし、V099変数が開いているか確認します。ステータスアイコンが緑になっているものは開いています。赤になっているものは開いていません。
開いていない変数を選択してから、左下の 開く ボタンをタップします。
-
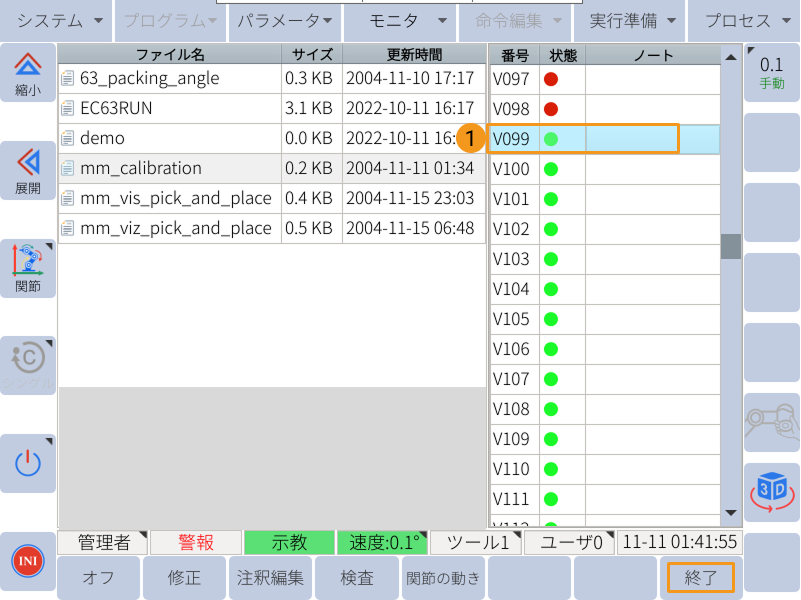
このように、ティーチペンダントで をタップしてP099変数を開き、終了 をタップしてホーム画面に戻ります。
2. キャリブレーションの初期位置を設定
-
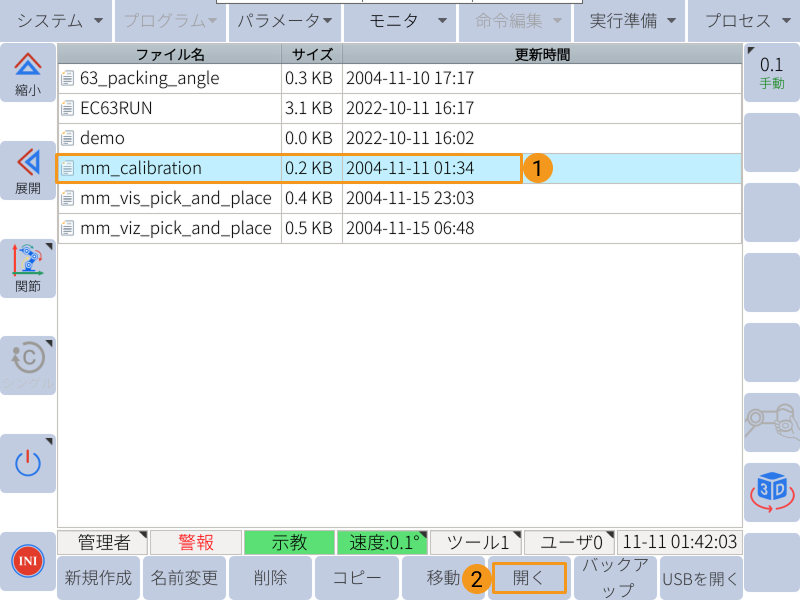
MM_Calibration を選択した後、開く をタップします。
-
手動でロボットをキャリブレーションの初期位置に移動させます。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。
-
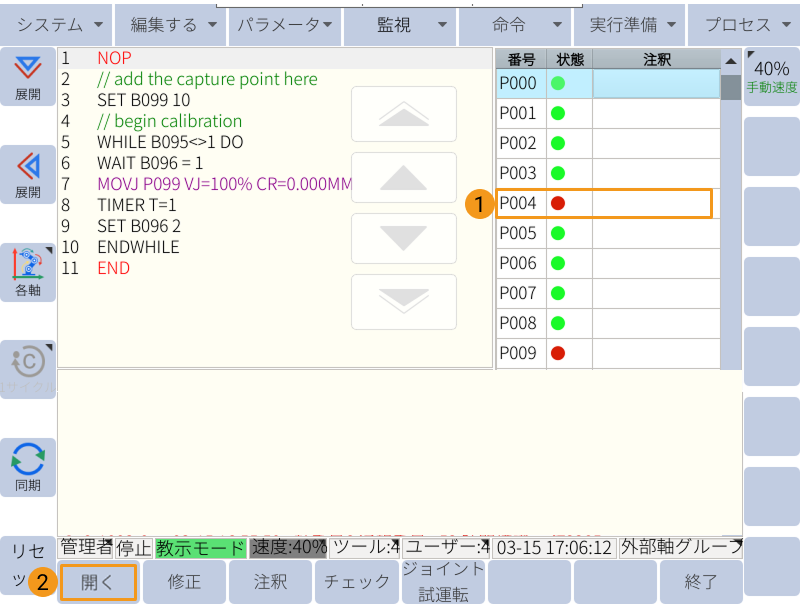
ティーチペンダントで をタップし、ティーチングポイントに保存したい変数を選択します。ここではキャリブレーションポイントはP004変数に保存します。
-
この変数が閉じている場合は、開く をタップしてティーチングポイントに保存します。
-
この変数が開いている場合は、オフ をタップしてから 開く をタップし、ティーチングポイントに保存します。
-
-
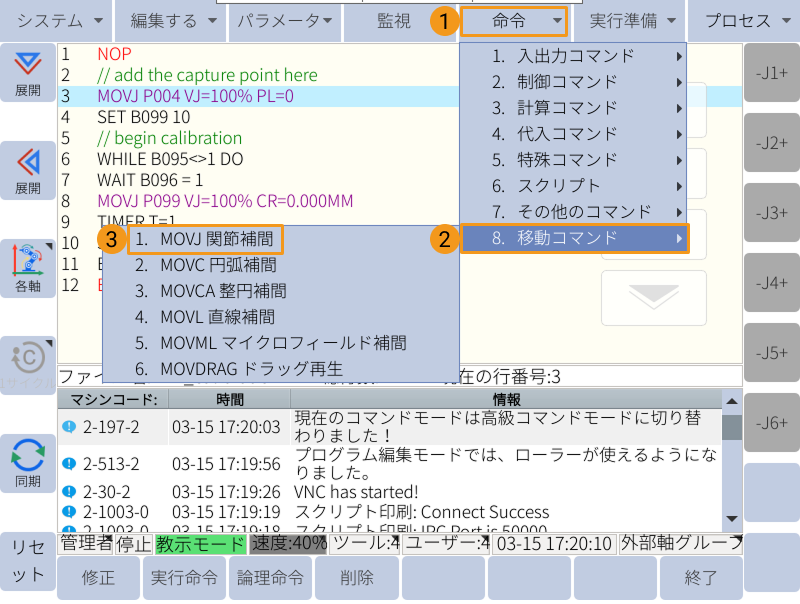
プログラムの2行目を選択し、 をタップします。
-
キャリブレーション初期位置を保存している変数Pを選択し、Done をタップします。ティーチペンダントの裏にある黄色いイネーブルスイッチを押し、確認 をクタップして移動コマンドを挿入します。


-
MOVJ命令を追加した場合に、以下のようにプログラム3行目の命令が見えます。
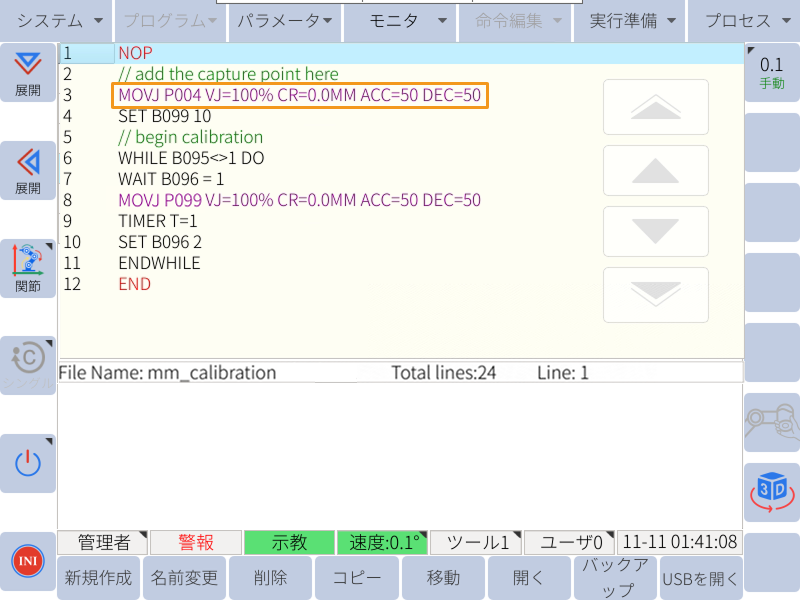
|
実際の状況に応じて移動の種類(MOVJまたはMOVL)を選択してください。MOVJ を選択した時、対応する 変数P を使用してキャリブレーションポイントを関節角度(JPs)として保存してください。MOVL を選択した時、対応する 変数V を使用してキャリブレーションポイントをTCPとして保存してください。 |
3. キャリブレーションプログラムを実行
-
カーソルをプログラムの一行目に合わせ、ティーチペンダントのキーを回転させてPLAYモードにします。
-
ティーチペンダントの右下の黄色いボタンを押してサーボモーターを起動し、それから緑色のボタンを押してプログラムを自動的に実行します。

-
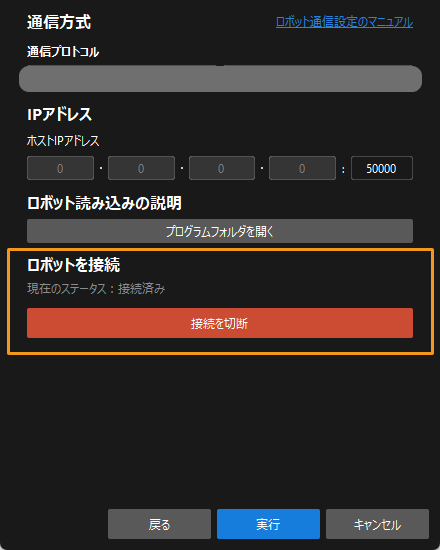
Mech-Visionの キャリブレーション 画面では、ロボットを接続 の下に「接続済み」の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、次へ をクリックします。
-
次に、キャリブレーションを実行 の4番目の手順(動作経路を設定)および残りの設定を実行します。以下の内容をご参照ください。