3220:コマンドデータ構文エラー
問題
Yaskawaロボットでフォアグラウンドプログラムを読み込む際に、エラー3220(コマンドデータ構文エラー)が発生します。
考えられる原因
読み込むプログラム内の軸構成設定に誤りがあります。
解決策
-
Mech-VisionおよびMech-Vizのソフトウェアインストールディレクトリにある
Communication Component/Robot_Interface/YASKAWA/JBI/MM_CALIB.JBIファイルを開き、読み込まれたファイルとMM_CALIB.JBIファイルを比較し、軸構成の設定が一致しているか確認してください。例えば、下図では左側が読み込まれたファイル、右側がMM_CALIB.JBIファイルであり、両者の軸構成設定が一致していないことが分かります。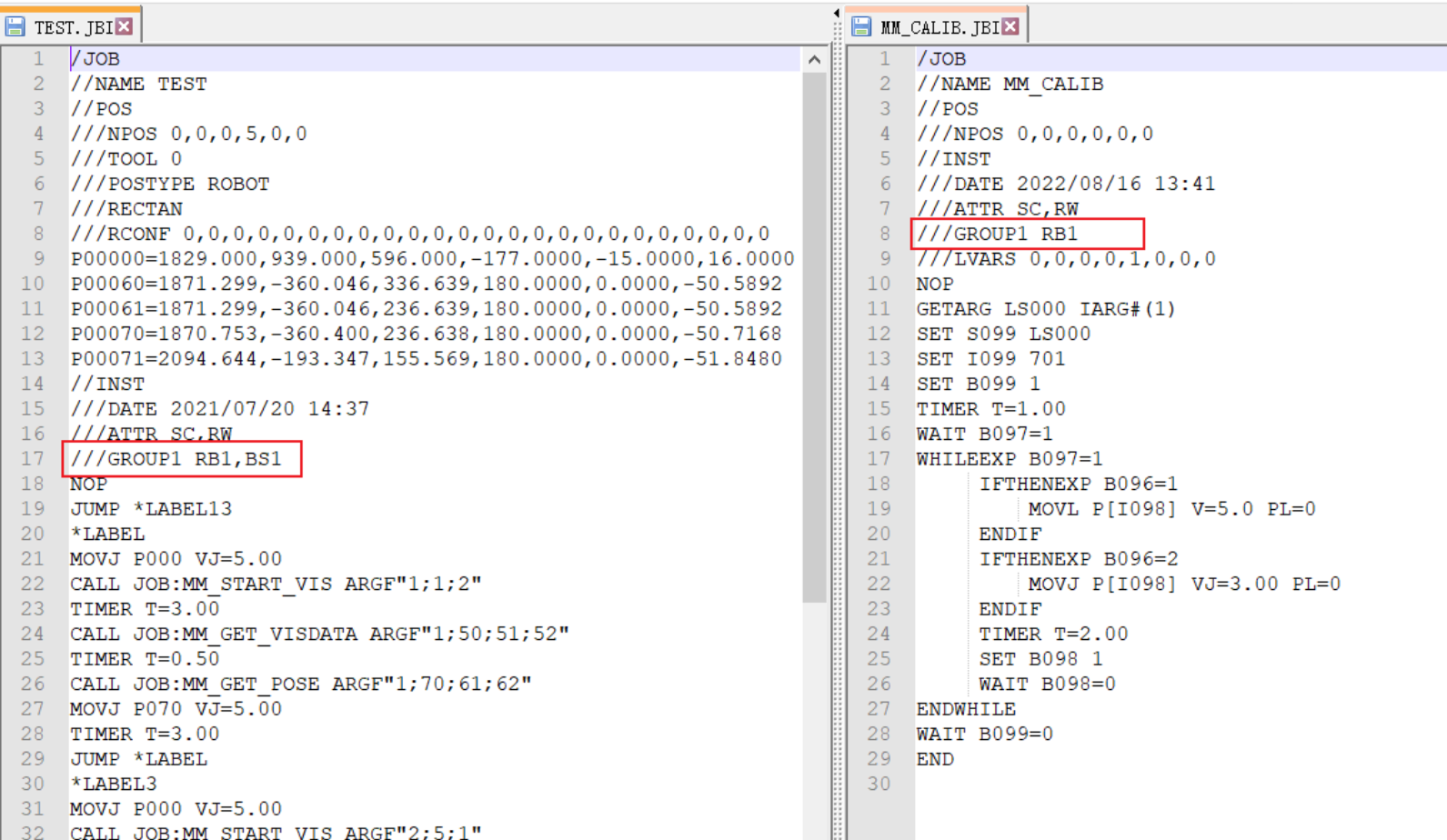
-
軸構成の設定が異なる場合は、読み込むファイルの軸構成をMM_CALIB.JBIファイルと同じ設定に置き換えた上で、再度読み込んでください。