mm_viz_pick_and_place
Mech-Vizプロジェクトを実行することで計画された経路を取得し、把持および配置を実行します。
設定説明
ポイントの設定
以下のように、このプロジェクトでは2つのポイントが使用されます。

-
vizPose:Mech-Vizから返された経路に基づいて定義されるポイント。事前にティーチングする必要はありません。
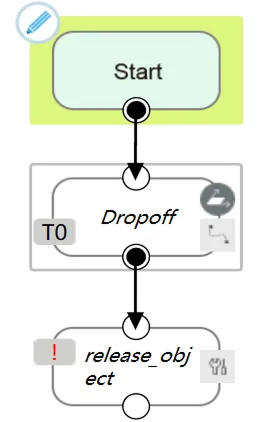
-
Dropoff:配置ポイント。事前にティーチングしなければなりません。
パラメータ設定
MM initコンポネント
全てのネットワークデバイスには、MM init によって生成されたネットワークデバイスを使用します。このコンポネントは、IPCのIPアドレスとポート番号 を修正できます。
Run Vizコンポーネント
手動で Run Viz コンポネントのパラメータを設定する必要があります。設定方法については、コンポネントのパラメータ値修正 をお読みください。
プログラム説明
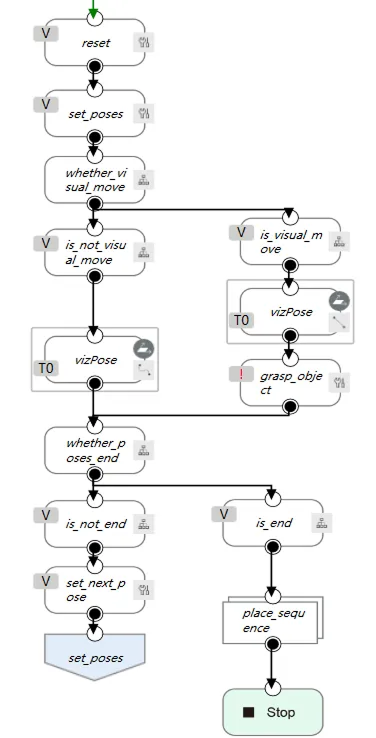
メインプログラム(mm_v201_viz_pick_and_place)
-
まず、mm_v201_init1 によってロボットとビジョンシステム間の通信を構築します。mm_v201_init1でIPCのIPアドレスとポート番号を修正できます。
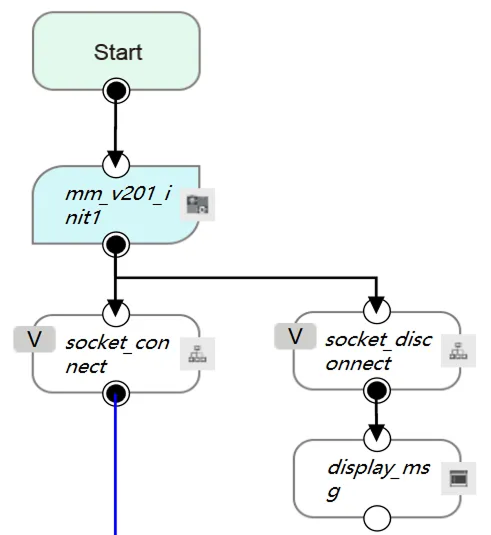
-
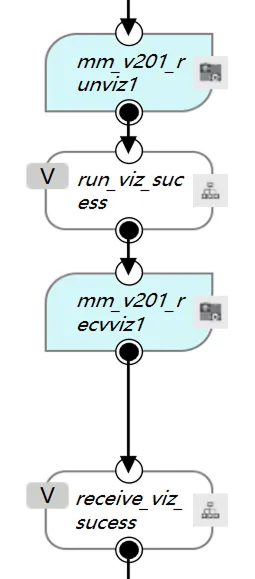
mm_v201_runviz1 によってMech-Vizプロジェクトを実行し、同時にその中で「メッセージによって異なる分岐を実行」ステップの出口番号と現在のインデックスを設定することが可能です。
-
mm_v201_recvviz1 によってMech-Vizプロジェクトの移動経路を取得します。これで、Mech-Vizから取得した経路は、文字列配列(string[])の形式でg_mm_socket_recv_arrayというグローバル変数に保存されます。
-
g_mm_socket_recv_arrayにある経路点の位置姿勢でvizPoseを定義し、かつそれが「ビジョン処理による移動」の経路点であるか判断します(「ビジョン処理による移動」ステップの対応する経路点で、把持点として使用される)。「ビジョン処理による移動」の経路点でなければ、関節運動で経路点に移動します。「ビジョン処理による移動」の経路点であれば、直線運動で経路点に移動してから対象物を把持します。grasp_objectも同じように不完全ですが、ユーザーはここでロボットハンドを制御するためのパラメータ設定を変更することができます。
-
計画した経路点に到達したか判断します。全部到達した場合、対象物配置のワークフローに入ります。