概要
事前準備
本マニュアルを利用の際に以下の準備が必要です。
-
下記のリンク(オンラインDocs)を参照し、サンプルプログラムおよび標準インタフェースプログラムをインストールして、通信設定を行います。
-
読み込むファイルは下記です(ダウンロード )
-
MM.h
-
MM_Auto_Calib.pcs
-
MM_Module.pcs
-
MM_Check.pcs
-
MM_S01.pcs ~ MM_S05.pcs
-
-
自動キャリブレーション を参照し、MM_Auto_Calib.pcsを実行します。この手順によって 外部パラメータのキャリブレーション が行われます。
-
必要な Mech-Vision、Mech-Vizのプロジェクトを作成し、現在のプログラムを自動的に読み込む にチェックを入れます。
-
TCP(ツール)を Mech-Viz 上およびロボットにて正しく設定します。
-
ロボットが予期しない動作する可能性があるので、初めは速度を低く設定します。
予備知識
標準インターフェースコマンドの使用にあたり、必ず以下の点を意識しながら進めてください。
-
Mech-Visionから出力される位置姿勢について、通常はロボットのベース座標系における対象物の位置と回転角を表します。よって、結果取得の際はコマンド「MM_Get_Pose」で TCP 位置姿勢を取得します。
-
Mech-Visionの 経路計画機能 やMech-Vizから出力される経路よりロボットを動作させる場合、経路点は関節角度・TCP 2 種類で表現ができますが、コマンド「MM_Get_JPS」で関節角度を取得することを推奨します。TCPの場合はロボットコントローラとMech-Vizで形態の選択が異なる場合があり、衝突検出が正しく機能しない可能性があります。
-
コマンド「Open_socket」は、Densoのデータ通信関数Commを呼び出します。通常、プログラムの始めに「Open_socket」を実行し、終了前に「Close_socket」を呼び出します。
|
メインプログラムと通信プログラムの役割、またMech-Mindシステムがコマンドを受信してからの行動は下図のフローチャートに示されます。通信プログラムはメインプログラムから独立して使用できます。 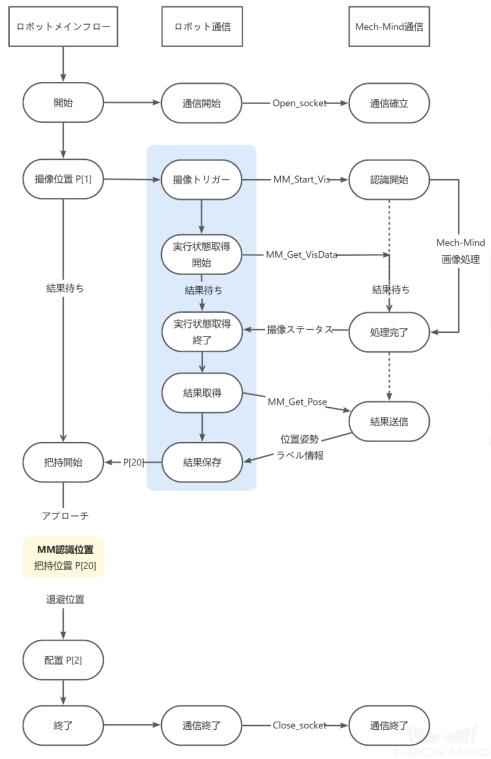
|
安全注意、免責事項
サンプルプログラムを用いてロボットの動作を行う際はロボットの動作範囲内に入らないように注意してください。
-
当資料にあるサンプルプログラムの使用にあたり、必ず以下の点に注意しながらソフトウェア、ロボットの操作を行ってください。
-
サンプルプログラムの為想定外の動きをする可能性があります。衝突などに注意し、ロボットを停止させることが出来る状態にてお使い下さい。
-
当資料のサンプルプログラムについて、できる限り動作確認を行い安全性を保つように努めていますが、掲載内容の正確性・完全性・信頼性・最新性を保証するものではございません。
-
当該サンプルプログラムに起因してご利用者様および第三者に損害が発生したとしても、当社は責任を負わないものとします。