標準インターフェースコマンド
合計6つの標準インターフェースのコンポーネントが用意されています。
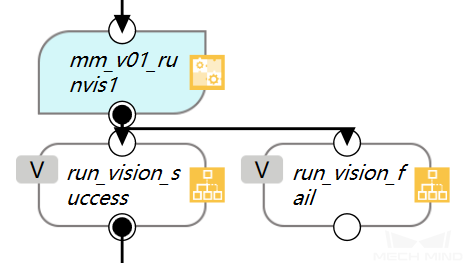
Mech-Visionを実行 (Run Vision)
このコンポーネントはMech-Visionプロジェクトを実行するために使用されます。
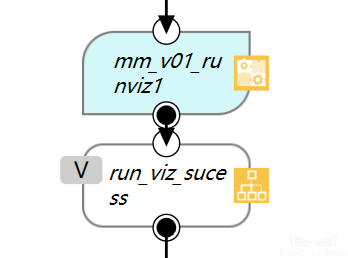
Mech-Vizを実行 (Run Viz)
このコンポーネントはMech-Vizプロジェクトを実行するために使用されます。
設定可能なパラメータ
-
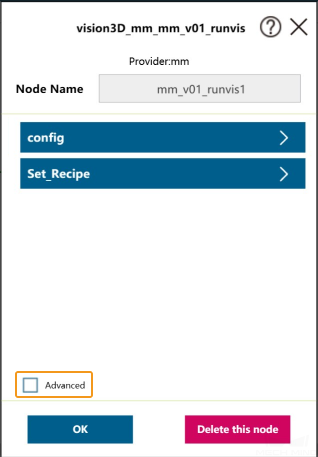
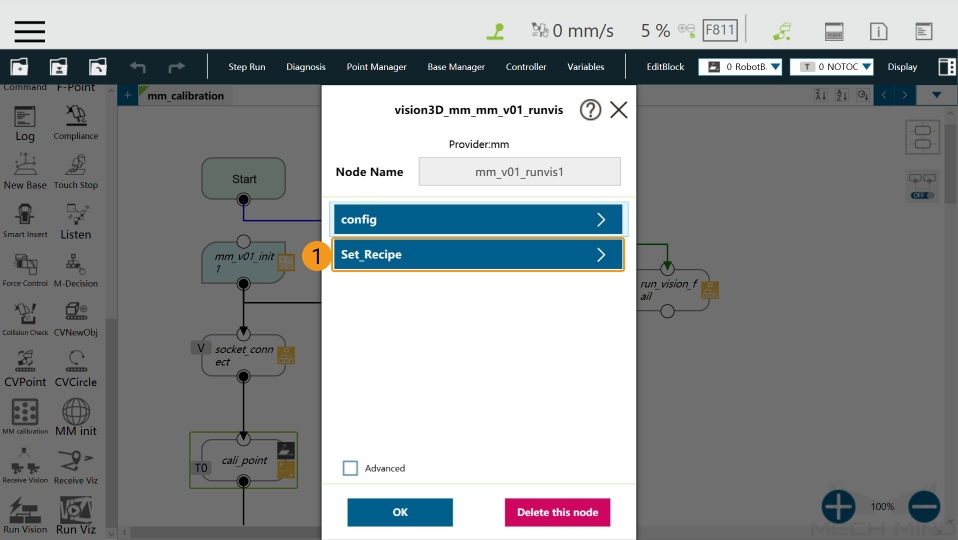
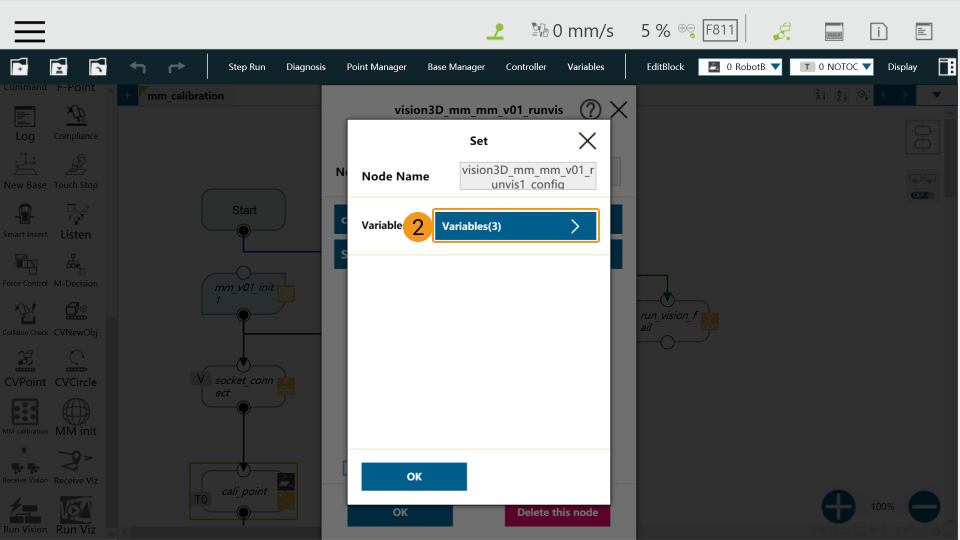
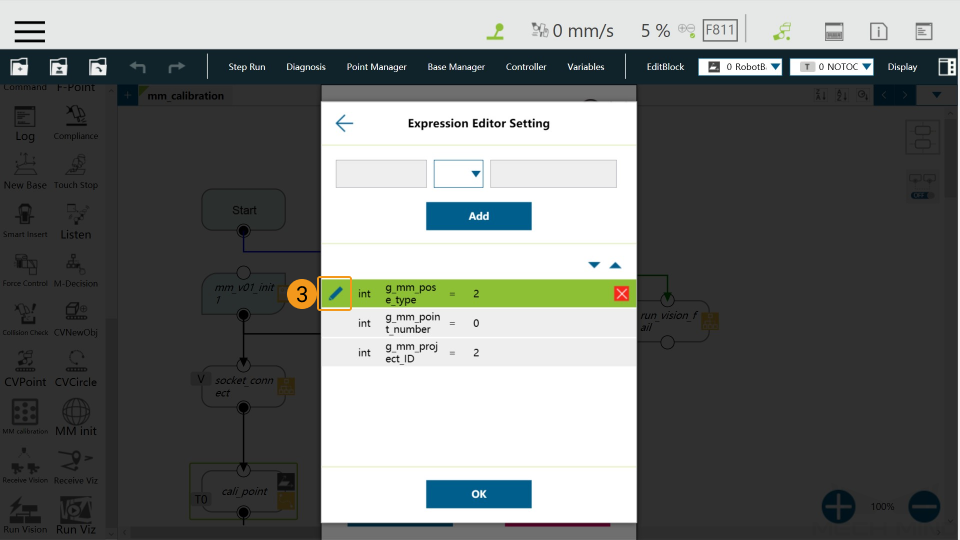
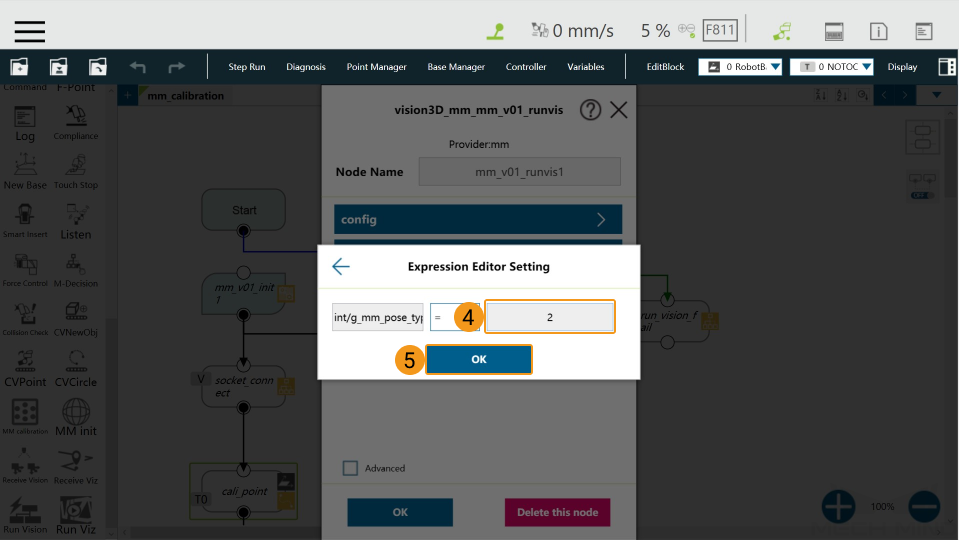
Config
-
g_mm_runviz_pose_type : ロボットの位置姿勢タイプは、値が1のみとなり、これは関節角度を示します
-
g_whether_after_161 : Mech-VisionおよびMech-Vizのソフトウェアバージョンが1.6.1以降であるかどうか、true は「はい」、false は「いいえ」を示します
-
-
Set_Branch
-
g_mm_whether_set_branch : 分岐を設定するかどうか(trueは分岐を設定する必要がある、falseは分岐を設定する必要がない)
-
g_mm_branch_task_ID : 分岐ステップ名
-
g_mm_branch_out_port : 分岐出口番号
-
-
Set_Index
-
g_mm_whether_set_index : インデックスを設定するかどうか(trueはインデックスを設定する必要がある、falseはインデックスを設定する必要がない)
-
g_mm_index_task_ID : インデックス関連のステップ名
-
g_mm_index_value : インデックス值
-
ビジョン結果を取得 (Receive Vision)
このコンポーネントはMech-Visionプロジェクトを実行した後、Mech-Visionの結果を取得するために使用されます。出口の判定条件はビジョン結果のステータスコードです。
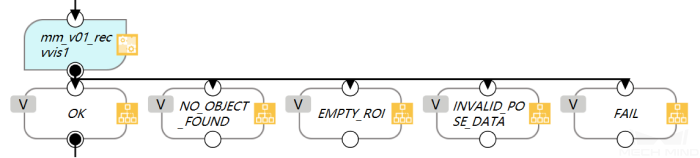
このコンポーネントが実行された後、Mech-Visionからの結果は文字列配列(string[])の形式でg_mm_socket_recv_arrayというグローバル変数に保存され、ユーザーはこの変数のデータを処理することができます。
出口の対応するステータスコード:
-
NO_OBJECT_FOUND: 1002
-
EMPTY_ROI: 1003
-
INVALID_POSE_DATA: 1006
経路計画を取得 (Receive Viz)
このコンポーネントはMech-Vizプロジェクトを実行した後、Mech-Vizによって計画された経路を取得するために使用されます。
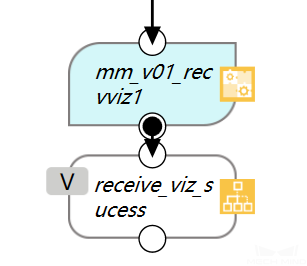
このコンポーネントが実行された後、Mech-Vizからの結果は文字列配列(string[])の形式でg_mm_socket_recv_arrayというグローバル変数に保存され、ユーザーはこの変数のデータを処理することができます。
すべての経路点は文字列配列(string[])の形式でg_mm_total_pointというグローバル変数に保存されます。最初の6つの要素が最初の経路点であり、7番目から12番目の要素が2番目の経路点で、以此類推して6つの要素ごとに経路点が増加します。
さらに、このコンポーネントは整数型(int)の変数g_mm_recv_viz_timeを提供しており、経路計画コンポーネントのトリガー回数を記録することができます。 この変数は0からカウントされ、経路計画コンポーネントを1回トリガーしたことを意味します。2回トリガーした場合は値が1になります。
注意事項
左側の機能バーからコンポーネントをドラッグ&ドロップする場合(initを除く)、左上隅にある  をクリックして Advanced にチェックを入れる必要があります。send と recv 変数を持つネットワークデバイスをinitで生成されたネットワークデバイスとして選択し、すべてのコンポーネントのネットワークデバイスを統一する必要があります。
をクリックして Advanced にチェックを入れる必要があります。send と recv 変数を持つネットワークデバイスをinitで生成されたネットワークデバイスとして選択し、すべてのコンポーネントのネットワークデバイスを統一する必要があります。