Vizティーチング通信設定
以下では、VizによりJAKAロボットをティーチングする方法について説明します。
コントローラとソフトウェアバージョンを確認
|
本文に記載されている型番およびバージョンは、動作確認に使用したものです。その他の型番やバージョンについても、本文を参考に操作をお試しください。問題が発生した場合は、Mech-Mindのテクニカルサポートまでお問い合わせください。 |
-
コントローラバージョン:1.5.12、1.5.13、1.7.0または1.7.1。
メイン画面の右下隅にある
 をクリックして、コントローラのバージョンを確認してください。
をクリックして、コントローラのバージョンを確認してください。 -
JAKA APP バージョン:コントローラのバージョンと対応している必要があります。
ネットワーク接続を確立
ハードウェア接続
ハードウェアを接続するには、以下のいずれかの方式を使用します。
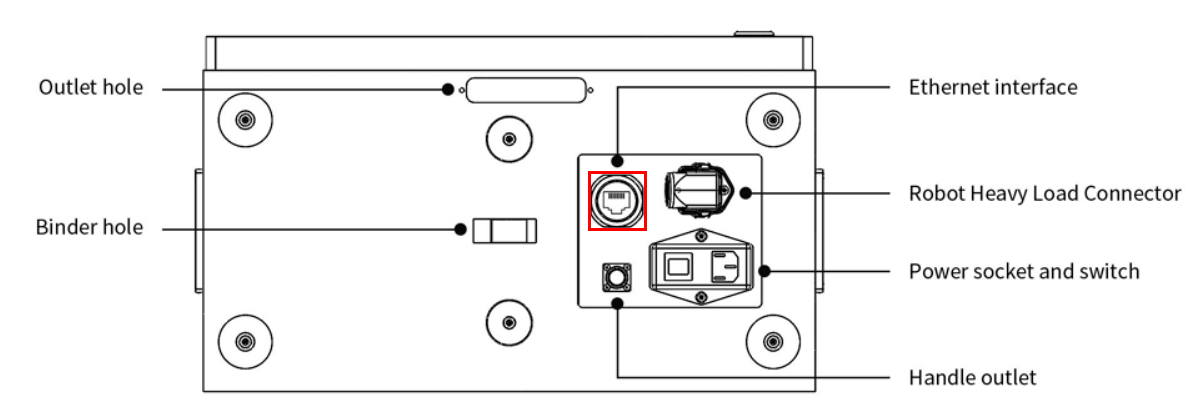
-
下図に示すように、IPCのLANケーブルをコントローラのイーサネットポートに接続します。
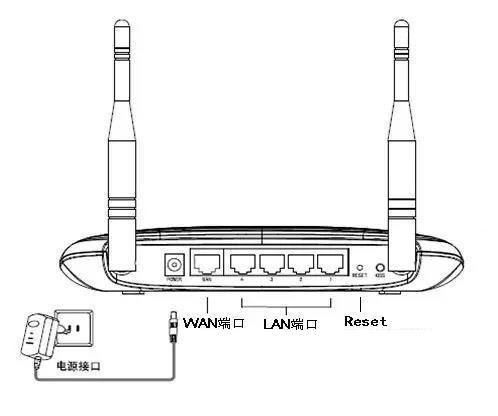
-
IPCとコントローラのLANケーブルを同じルーターに接続して、ロボットとIPCはルーター経由で同じネットワークセグメントに接続されます。
JAKA APPをインストール
JAKA APP スマホン・タブレットが対応するバージョンまたはPCが対応するバージョンをダウンロード、インストールします。JAKA APPは、従来の重いハンドヘルド型ティーチペンダントに代わるものであり、モバイルデバイスやPCにインストールし、ロボットと同じローカルネットワーク内で接続するだけで、ロボットを操作することができます。
| 複数のカメラを使用し、かつルーターはWifiに接続できない場合に、十分なLANポートがあるものを使用してください。 |
IPアドレスを設定
-
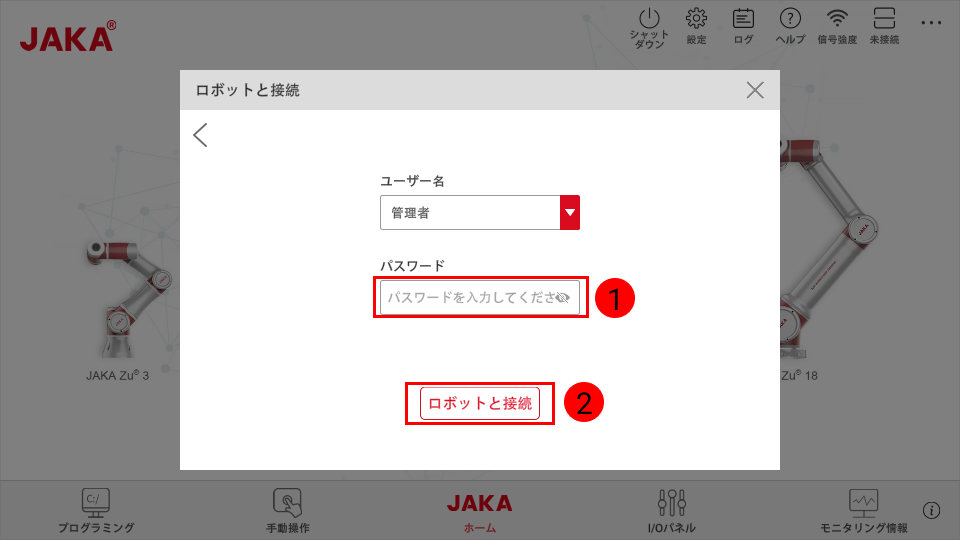
JAKA APPを起動して、メインインターフェイスの右上の 未接続 をクリックして ロボット接続 の画面に入ります。
 をクリックしてパスワード入力画面に入ります。
をクリックしてパスワード入力画面に入ります。
-
管理者のパスワード(デフォルトでは jakazuadmin)を入力して ロボットと接続 をクリックします。
-
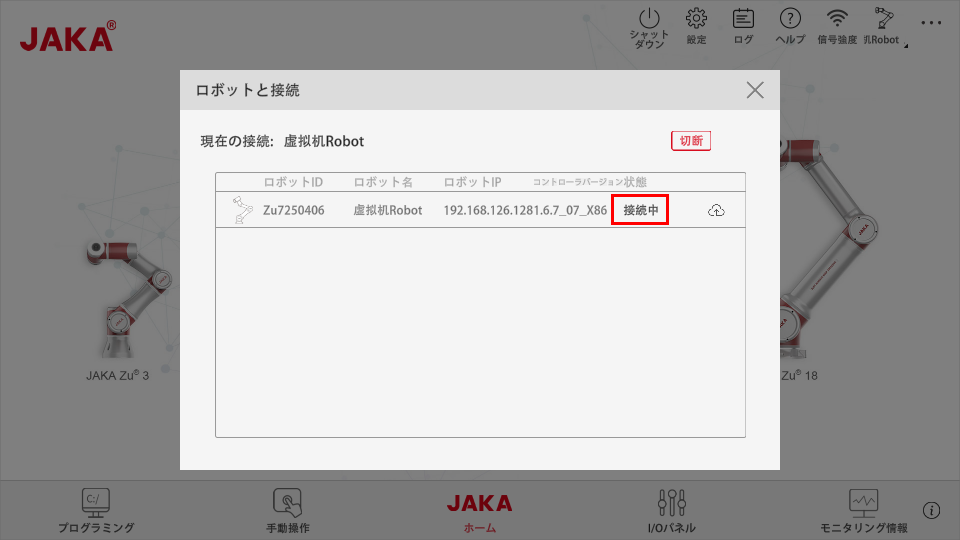
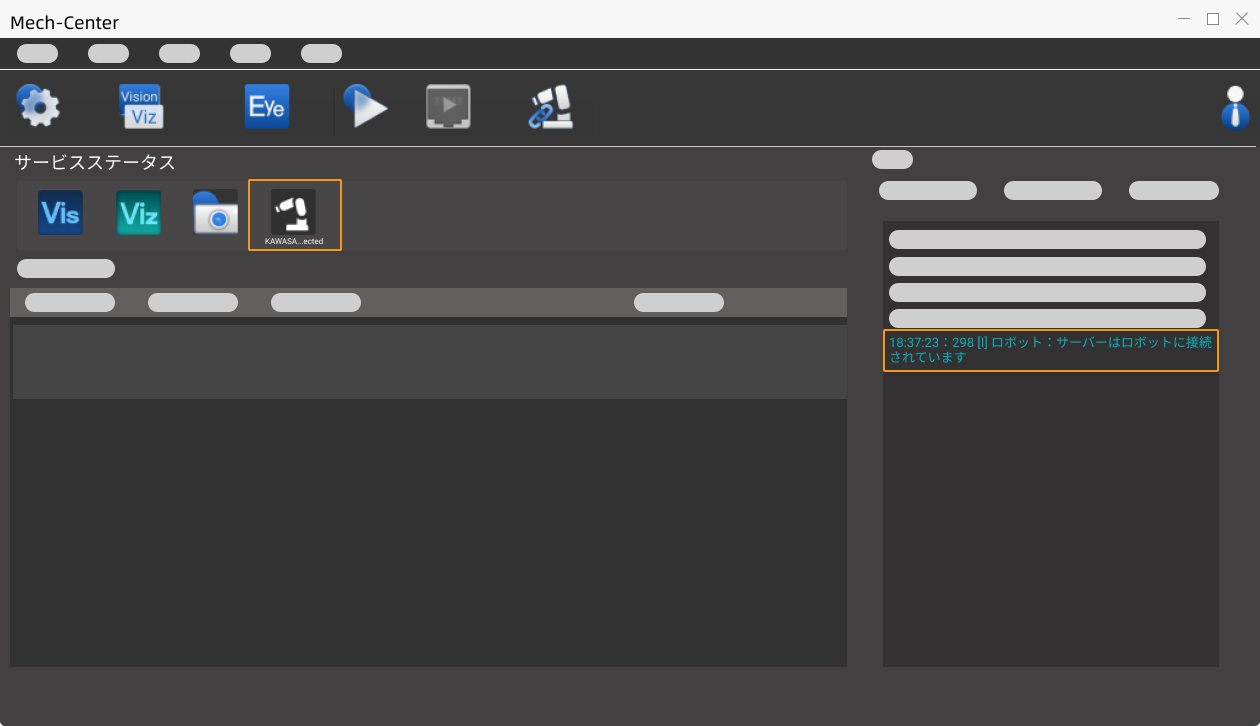
下図の画面が表示されたら、ロボットに接続したことになります。
-
電源オン をクリックしてから ロボット起動 をクリックしてロボットに電源を入れます。
ロボット電源を入れた後、メッセージウィンドウがポップアップしたら、必ずロボットハンドの可搬重量を記入してください。そうしないと、ロボットが起動直後に大きく変動し、危険を引き起こしやすくなります。 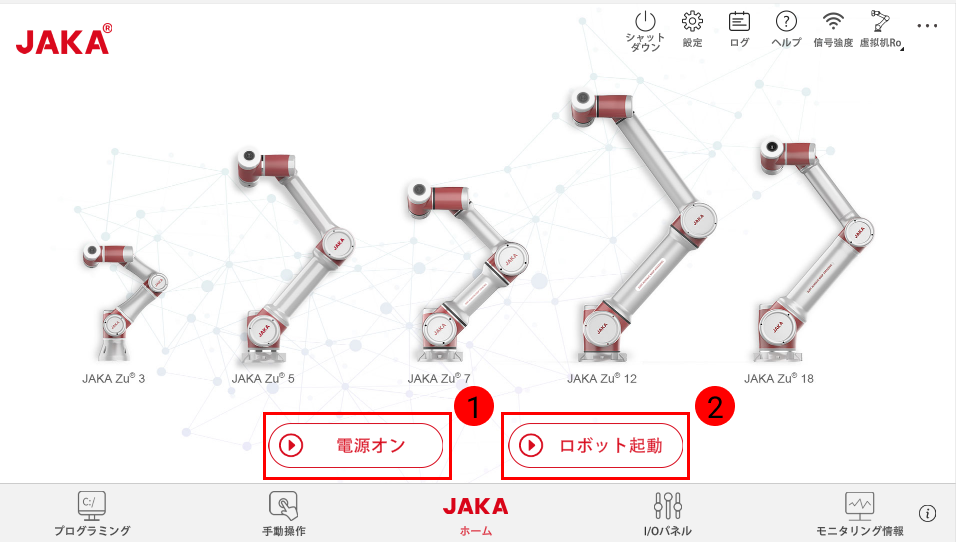
-
メインインターフェイスの右上隅にある 設定
 をクリックして、 をクリックすればIPを設定することができます。JAKA APPとJAKAロボットを同じネットワークセグメントに設定してください。
をクリックして、 をクリックすればIPを設定することができます。JAKA APPとJAKAロボットを同じネットワークセグメントに設定してください。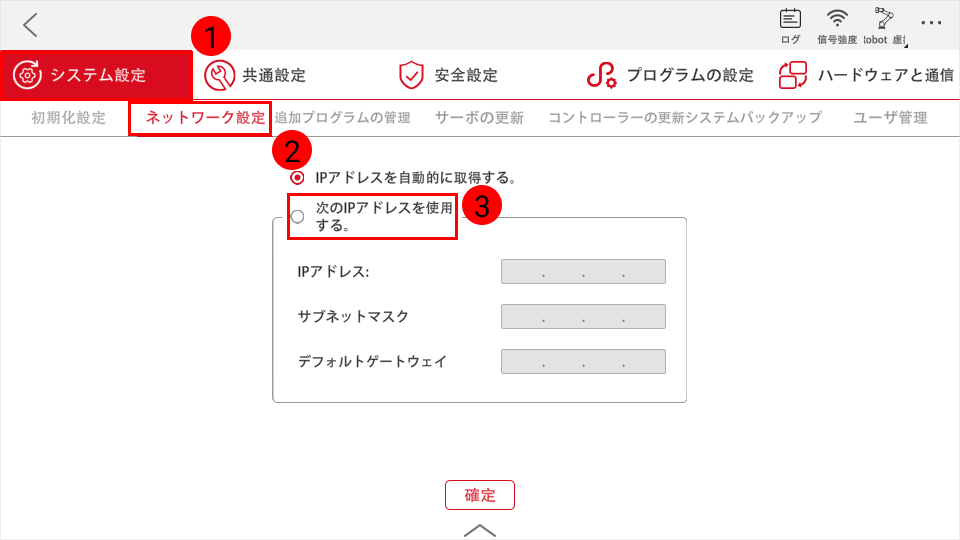
ロボットの接続状態をテスト
Mech-Vizプロジェクトの作成
-
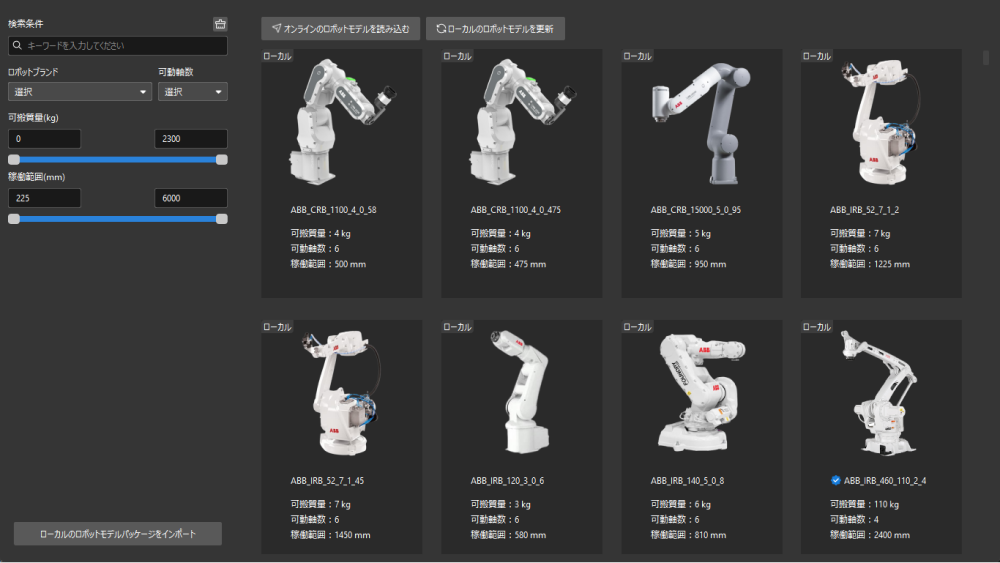
Mech-Vizソフトウェアを起動し、キーボードの Ctrl + N(新規作成)を押します。下図のような画面で、お使いのロボットのブランドや型番に応じてロボットモデルを選択します。
-
Ctrl + S を押して、プロジェクトを保存するフォルダを作成または選択します。
-
Mech-Vizの左側パネルでプロジェクトを右クリックし、自動的に読み込む にチェックを入れます。
ロボットを接続
-
Mech-Vizのツールバーで Vizティーチングによりロボットを接続 をクリックします。
-
ロボットIPアドレス にロボット実機のIPアドレスを入力し(図中のIPアドレスは説明のためのものです)、ロボットを接続 をクリックします。
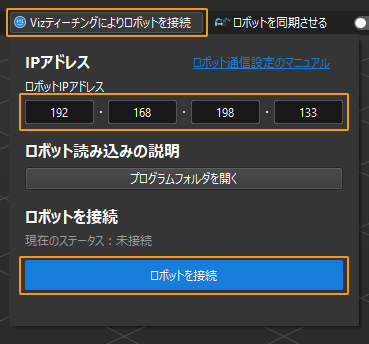
Mech-Vizがロボット実機との接続に成功すると、現在のステータスが 接続済み と表示され、ツールバーのアイコンが青から緑に変わります。
接続に失敗した場合、設定されたロボットIPアドレスが正しいか確認してください。
ロボットを移動
|
Mech-Vizでロボットを制御する前に、以下のことに注意してください。
|
-
DHパラメータの設定手順は以下の通りです。
-
ロボットと接続後、左上のロゴアイコンを10回クリックし、パスワード(デフォルト:JAKAAMAZING)を入力すると、以下の画面が表示されます。
-
Mech-Vizソフトウェア左側のウィンドウでロボット名を右クリックし、ロボットファイルディレクトリを開く を選択し、
xxxx_algo.jsonファイルを開きます。 -
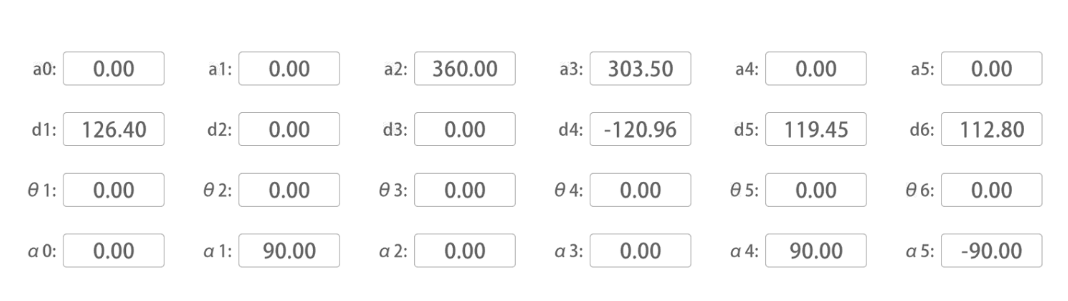
上図の [d1, a2, a3, d4, d5, d6] の値を、それぞれ
xxxx_algo.jsonファイル内の dh フィールドに入力し、ファイルを保存して閉じます。 -
Mech-Vizソフトウェア左側のウィンドウでロボット名を右クリックし、ロボットを再度読み込む を選択します。
xxxx_algo.jsonファイル内の shoulder_offset(肩部オフセット)および elbow_offset(肘部オフセット)の値は調整できないため、ロボットの動作にはある程度の誤差が残ることがあります。
-
-
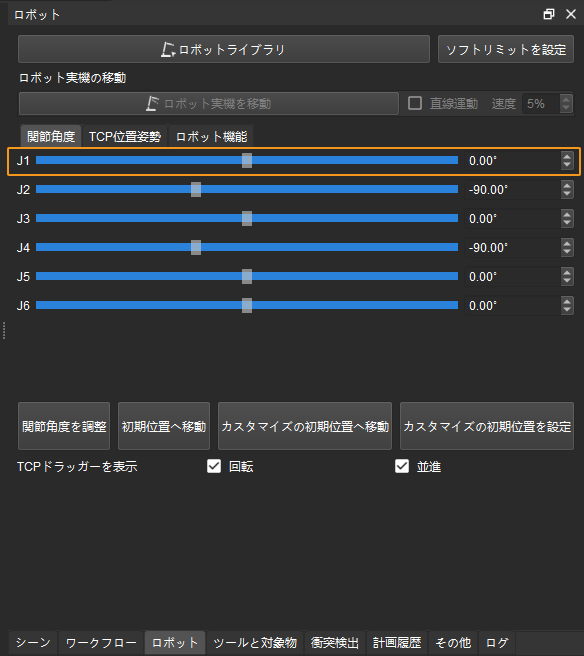
Mech-Vizのツールバーで速度と加速度を5%に設定します。

-
ツールバーの ロボットを同期させる をクリックして選択状態にすると、仮想空間の仮想ロボットの位置姿勢がロボット実機の位置姿勢に同期されます。その後、ロボットを同期させる をもう一度クリックして、選択状態を解除します。
-
ロボット タブで、J1の関節角度を調整します(例:0°から3°に変更)。すると、仮想ロボットの位置姿勢が変更されます。

-
ロボット実機を移動 をクリックし、ロボット実機の位置姿勢が変更されたかどうかを確認します。ロボット実機が仮想ロボットの位置姿勢に移動すると、Vizティーチング通信ができることを示します。
ロボットを操作する際は、人の安全を確保してください。緊急時には、ティーチペンダントの緊急停止ボタンを押してください!