Vizティーチング通信設定
以下では、VizによりJAKAロボットをティーチングする方法について説明します。
コントローラとソフトウェアバージョンを確認
-
コントローラバージョン:1.5.12_28_x86または1.5.13_27_x86。
メイン画面の右下隅にある
 をクリックして、コントローラのバージョンを確認してください。
をクリックして、コントローラのバージョンを確認してください。 -
JAKA Zu APPのバージョン:JAKA Zu APP 1.5バージョン(スマホン・タブレット)、JAKA Zu APP 1.5バージョン(PC)。
ネットワーク接続を確立
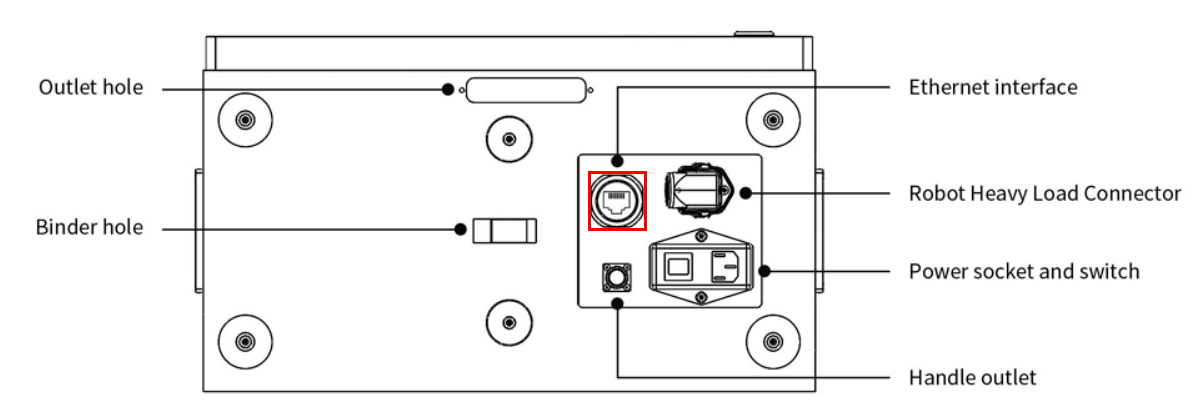
ハードウェアの接続
ハードウェア接続には以下の2つの方式があります(いずれか一つを選択可能)。
-
下図に示すように、IPCのLANケーブルをコントローラのイーサネットポートに接続します。
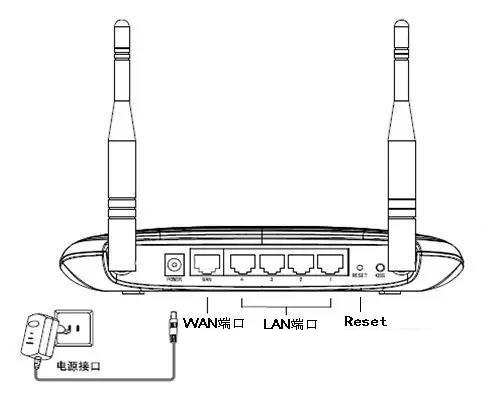
-
IPCとコントローラのLANケーブルを同じルーターに接続して、ロボットとIPCはルーター経由で同じネットワークセグメントに接続されます。
JAKA Zu APPをインストール
JAKA Zu APP 1.5 スマホン・タブレットが対応するバージョン又はPCが対応するバージョンをダウンロード、インストールします。JAKA Zu APPは、従来の重いハンドヘルド型ティーチペンダントに代わるものであり、モバイルデバイスやPCにインストールし、ロボットと同じローカルネットワーク内で接続するだけで、ロボットを操作することができます。
| 複数のカメラを使用し、かつルーターはWifiに接続できない場合に、十分なLANポートがあるものを使用してください。 |
IPアドレス設定
-
JAKA Zu APPを起動して、メインインターフェイスの右上の 未接続 をクリックして ロボット接続 の画面に入ります。
 をクリックしてパスワード入力画面に入ります。
をクリックしてパスワード入力画面に入ります。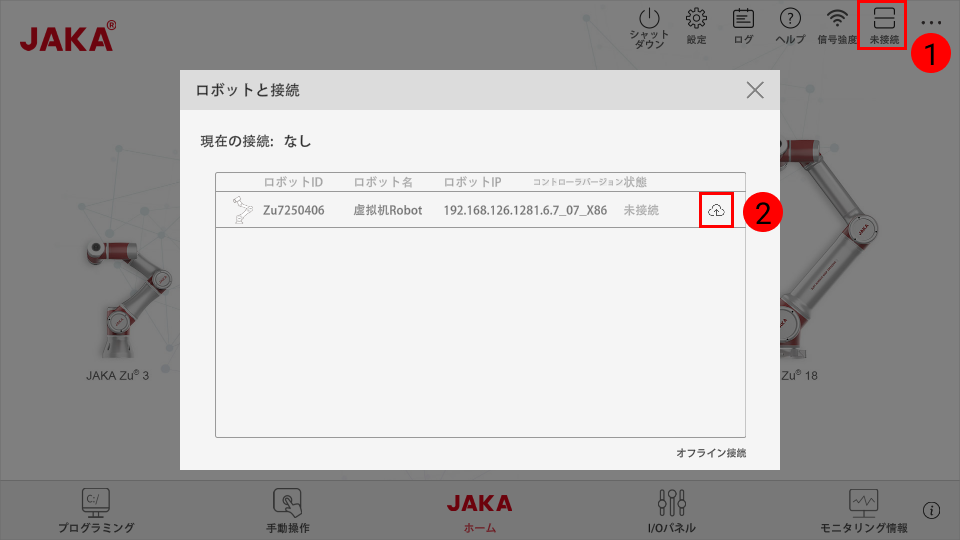
-
管理者のパスワード(デフォルトでは jakazuadmin)を入力して ロボットと接続 をクリックします。
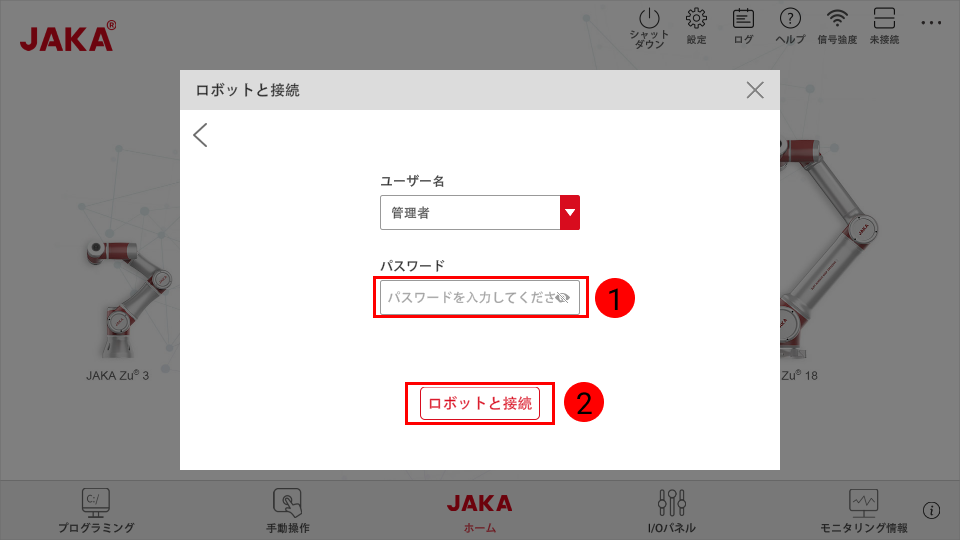
-
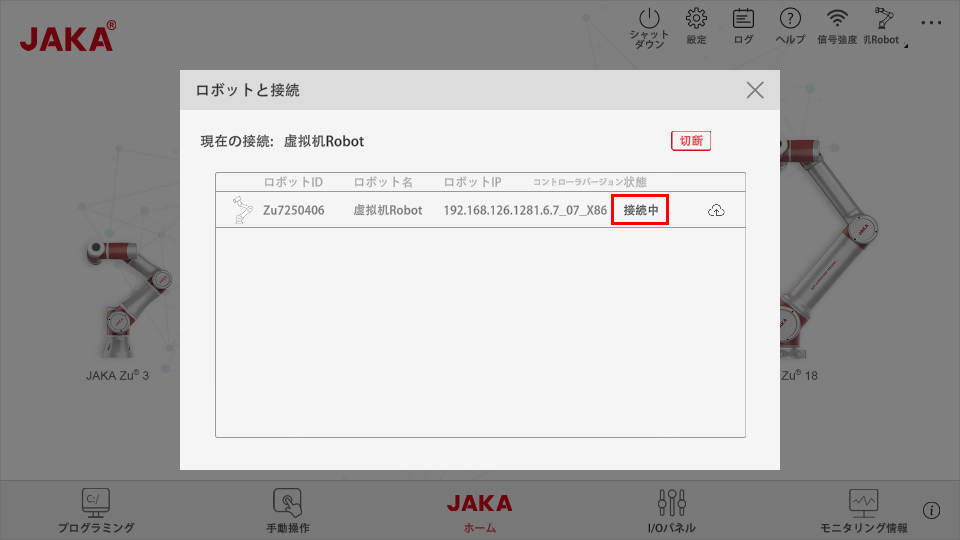
下図の画面が表示されたら、ロボットに接続したことになります。
-
電源オン をクリックしてから ロボット起動 をクリックしてロボットに電源を入れます。
ロボット電源を入れた後、メッセージウィンドウがポップアップしたら、必ずロボットハンドの可搬重量を記入してください。そうしないと、ロボットが起動直後に大きく変動し、危険を引き起こしやすくなります。 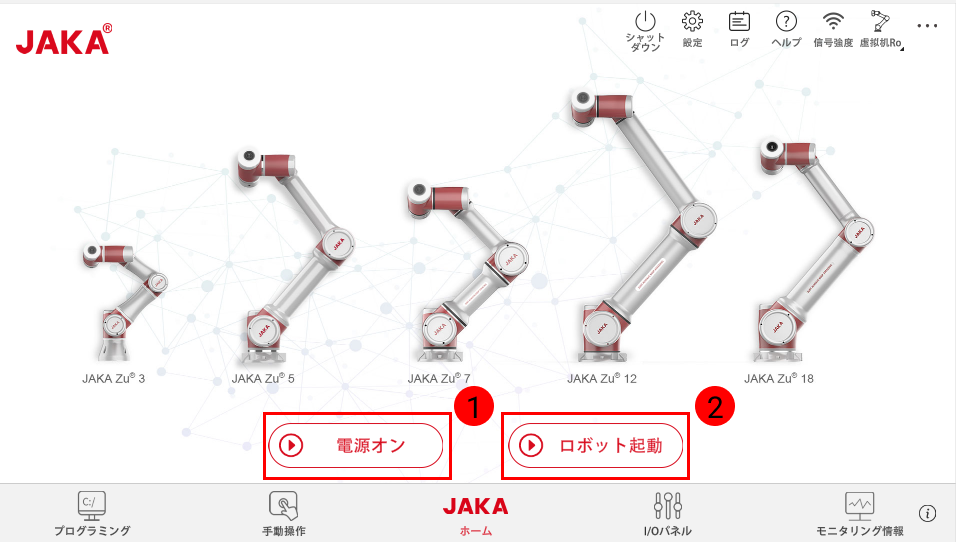
-
メインインターフェイスの右上隅にある 設定
 をクリックして、 をクリックすればIPを設定することができます。JAKA Zu APPとJAKAロボットを同じネットワークセグメントに設定してください。
をクリックして、 をクリックすればIPを設定することができます。JAKA Zu APPとJAKAロボットを同じネットワークセグメントに設定してください。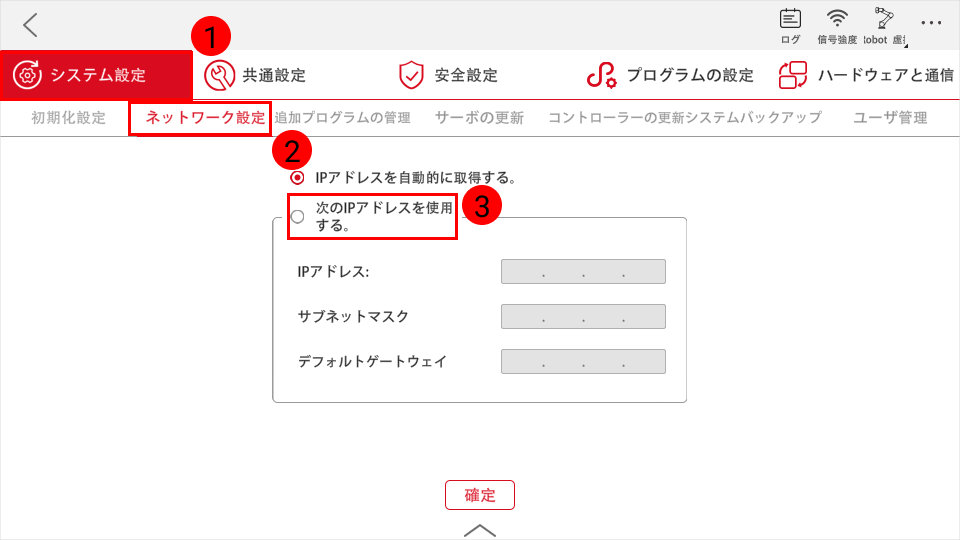
ロボットの接続状態をテスト
Mech-Vizでロボットを制御する前に、以下のことに注意してください。
-
Mech-Vizのツールバーで設定された速度は50%以下である必要があります。そうしないと、ロボットが動かないというエラーが発生しやすくなります。
-
ティーチペンダントでロボットハンドの可搬重量を必ず設定してください。設定しないと、ロボットの動作範囲は広すぎて、起動の瞬間を制御できなくなります。
-
Mech-Vizでは、移動ステップにできるだけ直線運動を使用します。関節運動が選択された場合、ロボットの動作は遅くなります。
-
DHパラメータはロボットによって異なりますので、ティーチペンダントでDHパラメータを読み取る必要があります。 読み取る方法は次の通りです。ロボットに接続後、左隅にあるlogoアイコンを10回クリックし、パラメータ(初期パスワードはJAKAAMAZING)を入力すると、以下の画面が表示されます。
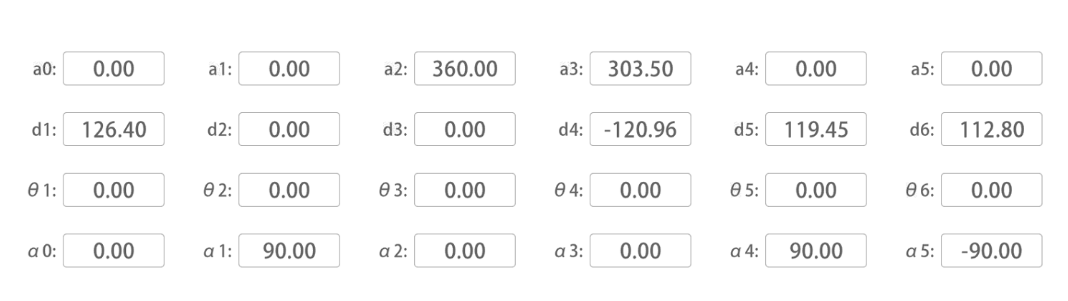
上図の[d1, a2, a3, d4, d5, d6]値を C:/Users/Administrator/AppData/Roaming/Mmind/robot/jaka/jaka_zu7/jaka_zu7_algo.json ファイルのdhフィールド値に記入します。jaka_zu7_algo.jsonファイルのshoulder_offsetとelbow_offsetの値を変更できないため、ロボット動作中に誤差が生じます。
詳細については、ロボットの接続状態をテスト をご参照ください。