自動キャリブレーション
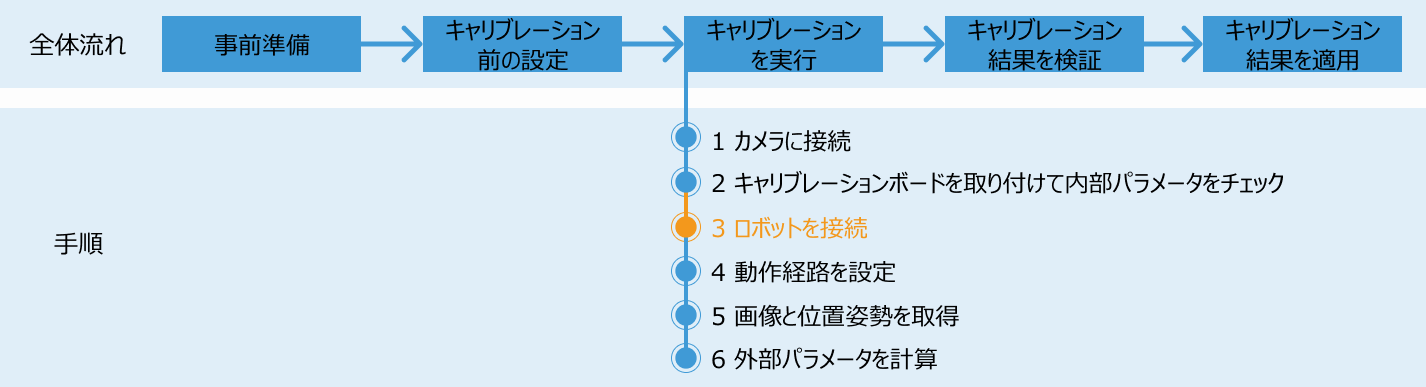
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
1. キャリブレーションするためのプログラムを選択
-
エキスパートへの切替 を参照して、管理者 に登録します。
-
KRC:\R1\mmフォルダからmm_module.srcを選択し、左下隅の 選択 をクリックしてプログラムの選択が完了します。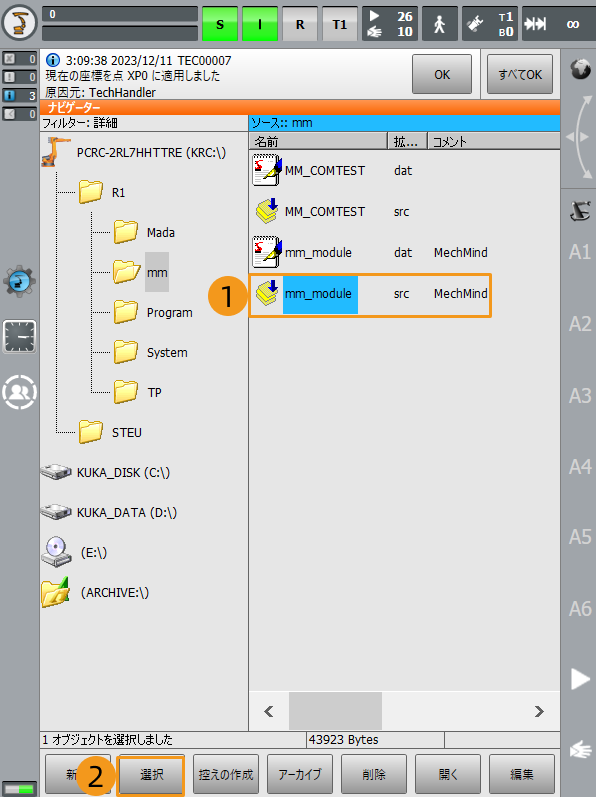
2.キャリブレーションの初期位置を設定
-
手動でロボットをキャリブレーションの初期位置に移動させます。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。
-
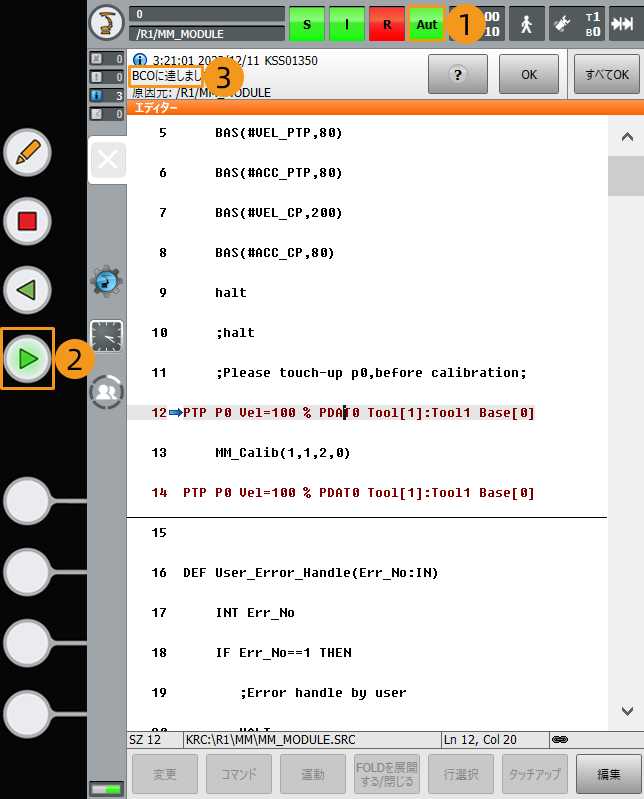
「PTP P0 Vel=100 % PDAT0 Tool[1]:Tool1 Base[0]」行をクリックし、カーソルをその行に移動させます。行選択 をクリックすると、その行の前にポインタが表示されますので、タッチアップ をクリックします。
タッチアップ ボタンが機能せず、エラーが発生した場合は、現在の行の移動コマンドを削除してから、移動コマンドを再作成してください。 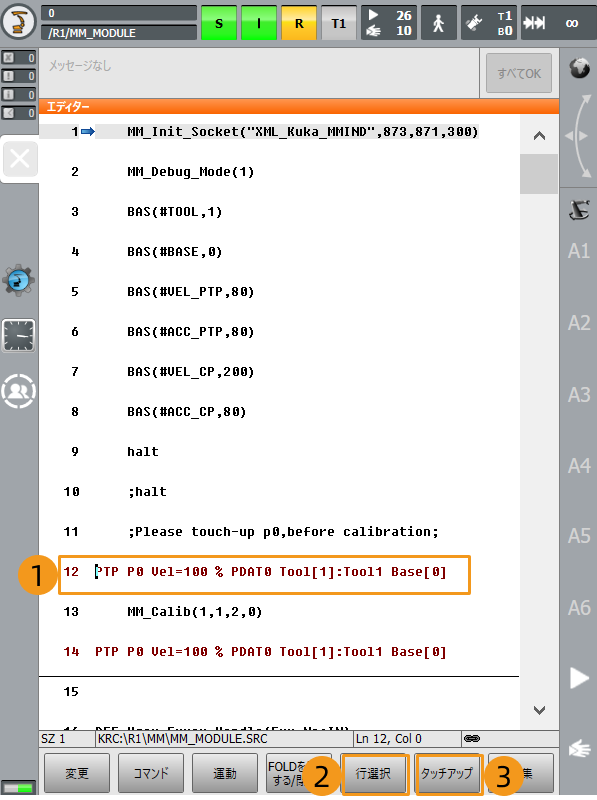
-
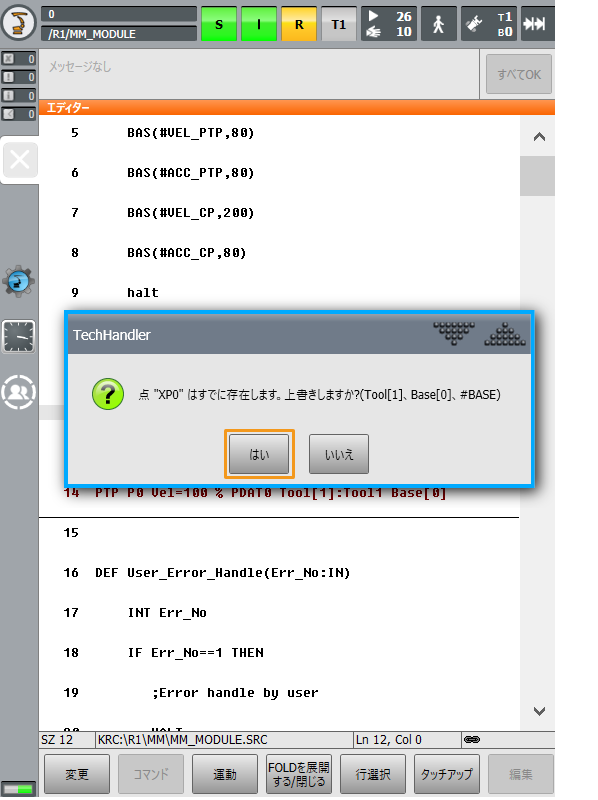
ポップアップ画面に はい をクリックすると、キャリブレーションの初期位置の設定は完了します。
3. キャリブレーションプログラムを実行
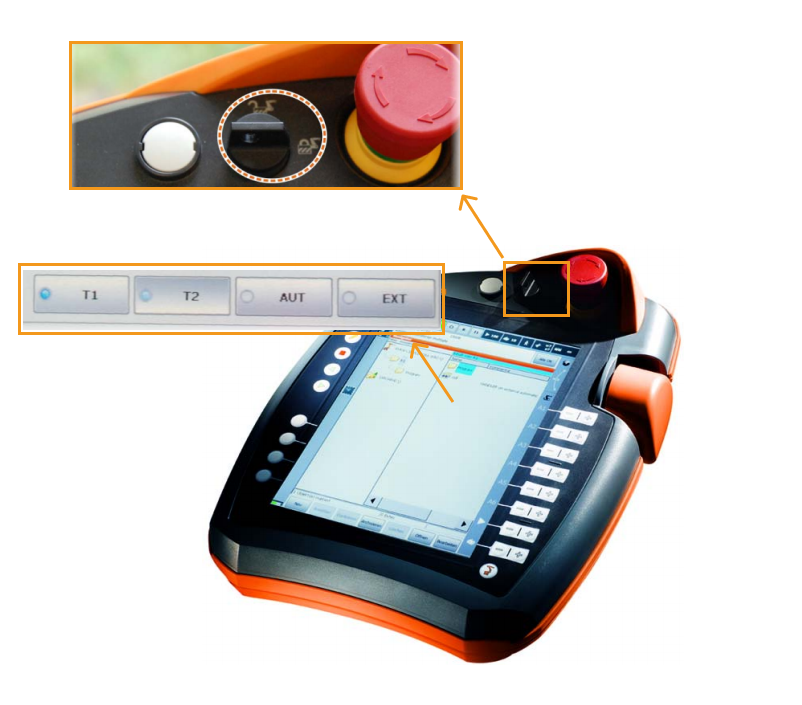
開始前に、実行モードの切り替え方法について理解しておく必要があります。以下に具体的な操作方法を示しますが、以降の説明では詳細を省略します。
ティーチペンダントの接続マネージャースイッチを横向きに回し、表示されるモード選択ダイアログで特定の実行モード(たとえば、T1またはAUT)を選択し、その後接続マネージャースイッチを元の位置に戻すと、ロボットの実行モードが切り替わります。
| T1は手動低速実行を示し、AUTは自動実行を示します。 |
-
前述の手順に従って、T1実行モードに切り替えます。
-
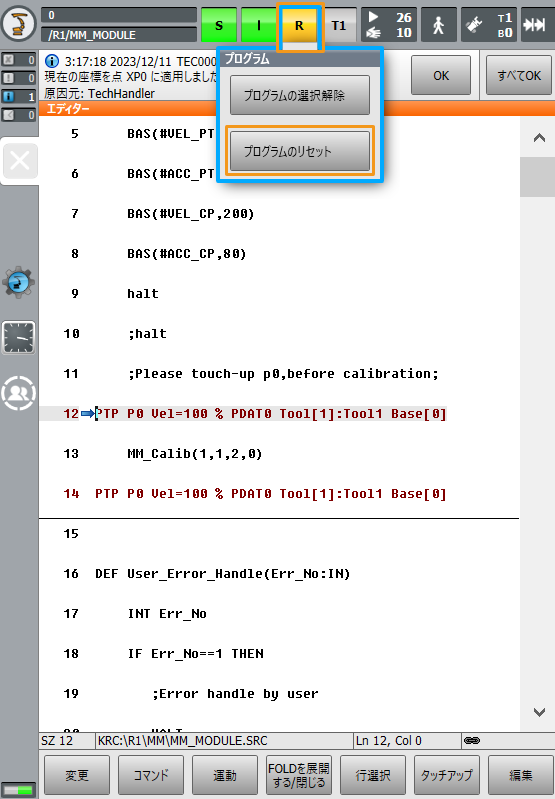
ティーチペンダントで R をクリックします。表示される画面で プログラムのリセット をクリックします。
-
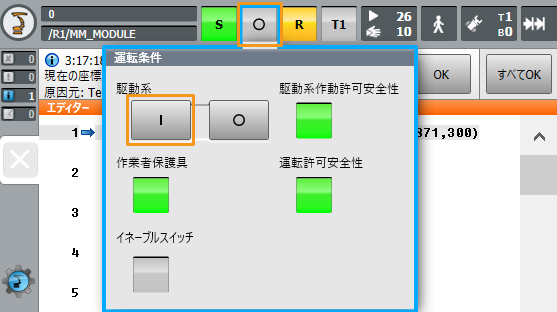
O をクリックし、ポップアップウィンドウで I をクリックして 駆動系 の状態を I に切り替えます。駆動系の状態がすでに I の場合は、この操作を無視します。
-
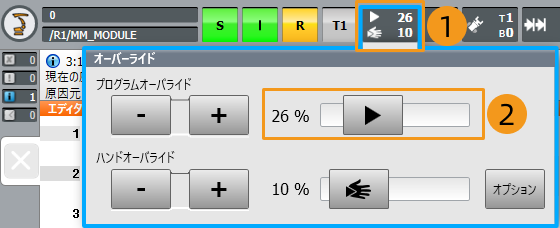
プログラムオーバーライド を適切な値に調整し、適切な実行速度を設定し、プログラムを実行する際にはロボットの動作に注意してください。
-
前述の手順に従って、AUT実行モードに切り替えます。
-
ティーチペンダントの正面にある 緑色の実行ボタン を繰り返し押して、「PTP P0 Vel=100 % PDAT0 Tool[1]:Tool1 Base[0]」の行(すなわち、ロボットがキャリブレーションの初期位置に到達する)まで実行してください。この時、画面の上部に BCOに達しました のメッセージが表示されます。
-
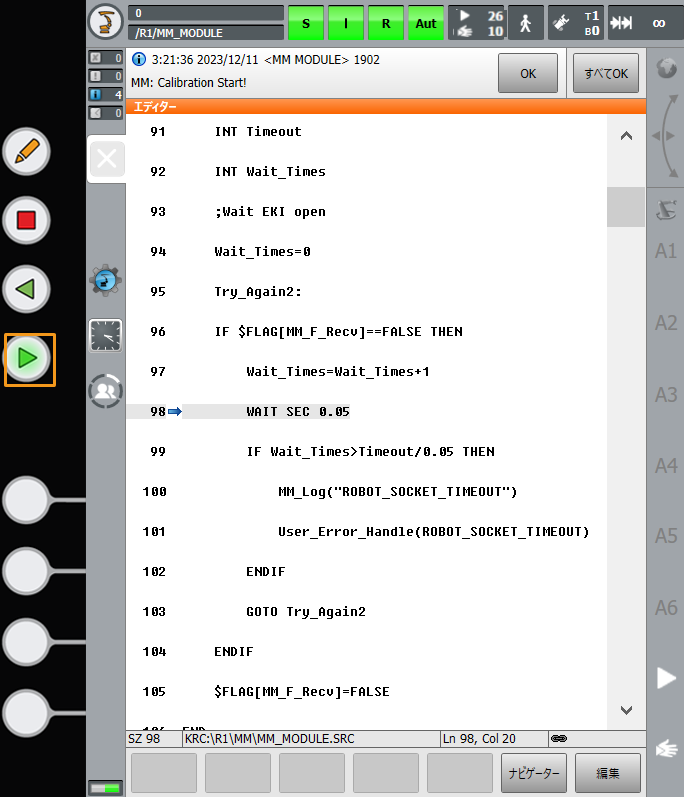
その後、実行ボタンを再び押してプログラムを続行してください(「R」が緑色に変わると、プログラムが実行中であることを示します)。
-
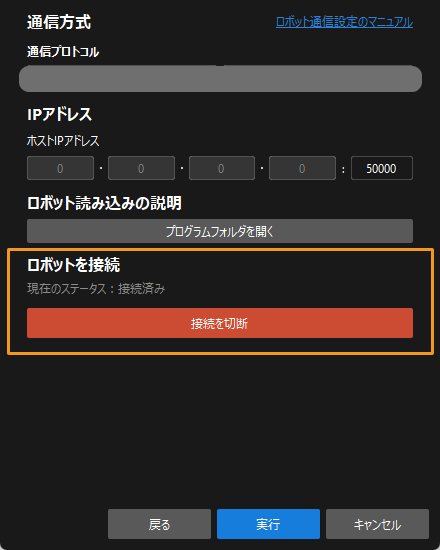
Mech-Visionの キャリブレーション 画面では、ロボットを接続 の下に「接続済み」の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、次へ をクリックします。
-
次に、キャリブレーションを実行 の4番目の手順(動作経路を設定)および残りの設定を実行します。以下の内容をご参照ください。