自動キャリブレーション
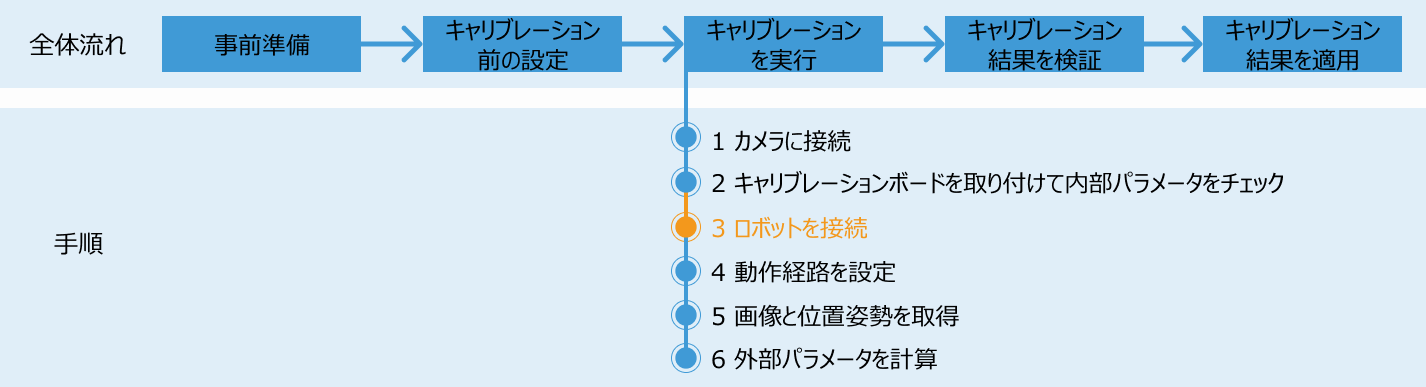
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
1. キャリブレーションプログラムの選択と変更
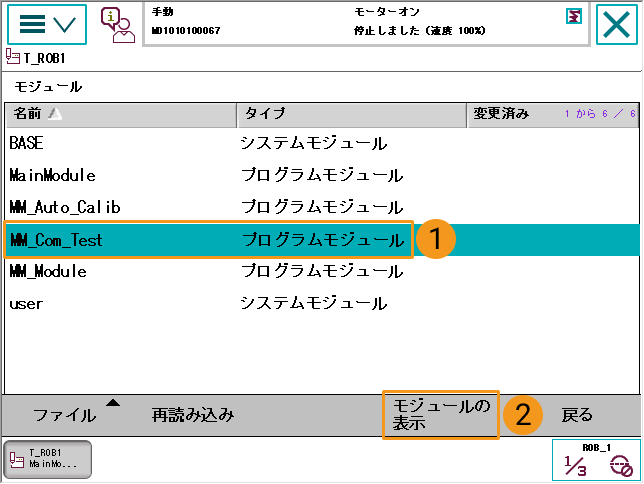
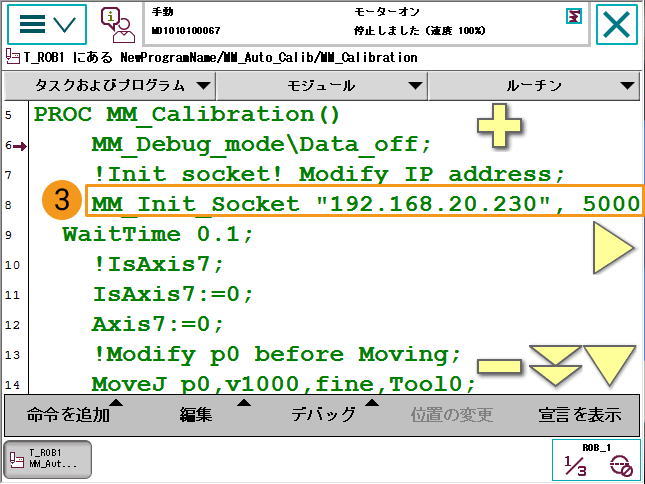
手動モードでは、 を順番に選択し、T_ROB1でMM_Auto_Calibプログラムモジュールを選択して開きます。プログラムのMM_Init_Socketコマンドの後のIPアドレスがIPCのIPアドレスと一致していること、ポート番号がMech-Visionで設定されたホストIPアドレスのポート番号と一致していることを確認します。詳細については、通信テスト用プログラムの選択と変更 をご参照ください。
2.キャリブレーションの初期位置を設定
-
手動でロボットをキャリブレーションの初期位置に移動させます。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。
-
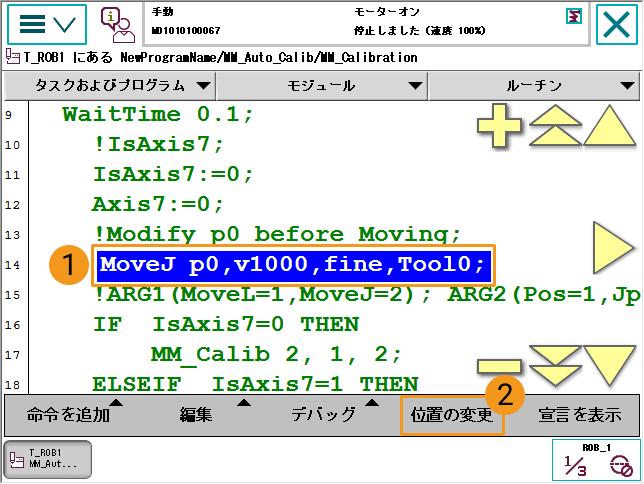
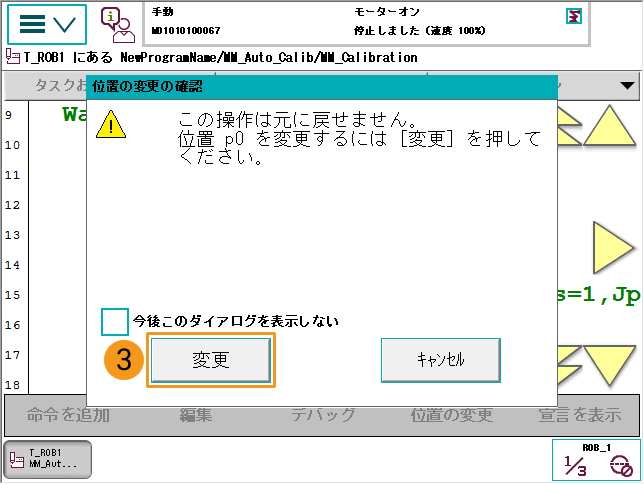
次のコード行を選択し、位置の変更 をクリックします。「位置の変更の確認」画面がポップアップしますので、変更 をクリックするとロボットの現在の位置姿勢がP0に保存されます。
-
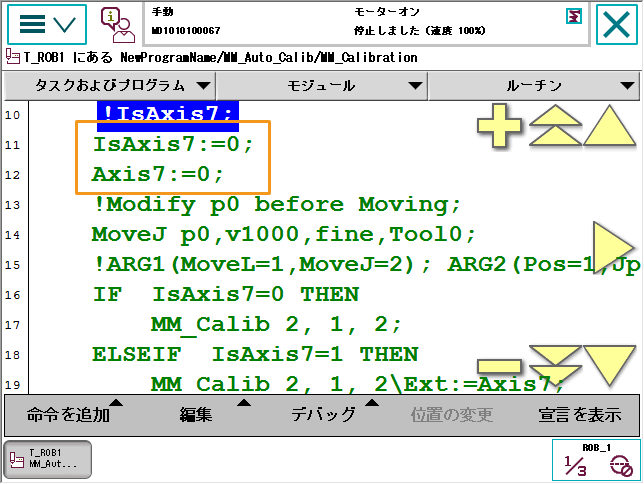
プロジェクト現場で7軸目としてロボット用レールを使用し、レールがロボットの動作によって制御する場合、「IsAxis7 :=0;」を「IsAxis7 :=1;」に変更し、かつ「Axis7 := XX;」を現在の7軸目の値に変更してください(ここで、XXは具体的な7軸目の値です)。レールを使用しない場合、またはレールがPLCによって制御されている場合は、この手順をスキップしてください。
3. キャリブレーションプログラムを実行
-
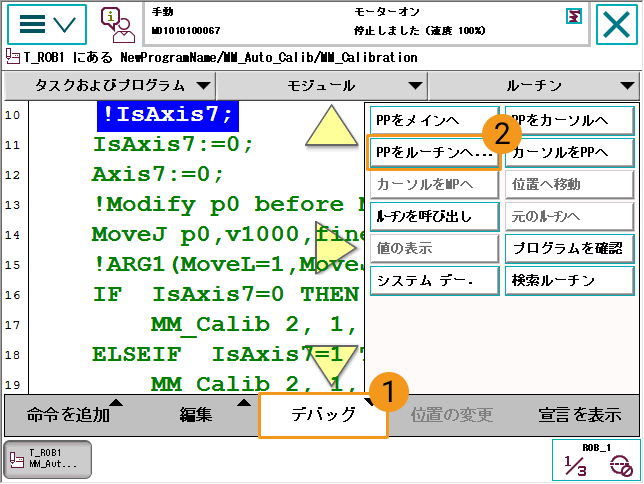
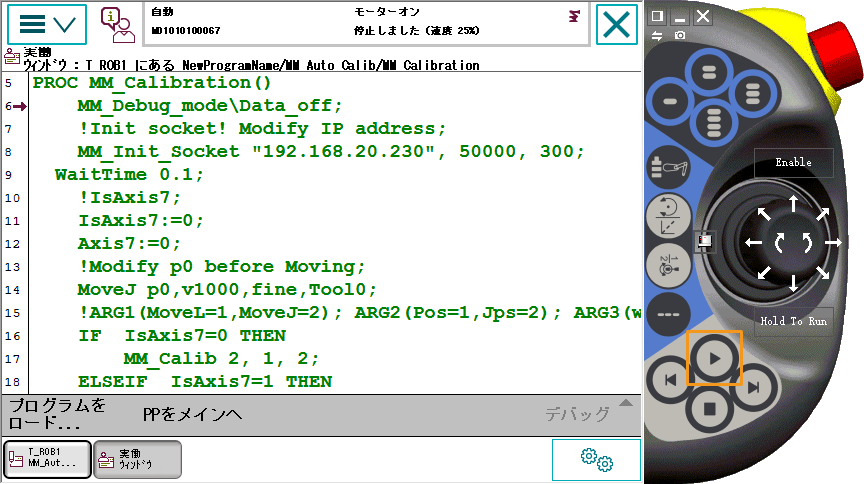
手動モードでは、MM_Auto_Calibプログラム画面で をクリックします。
-
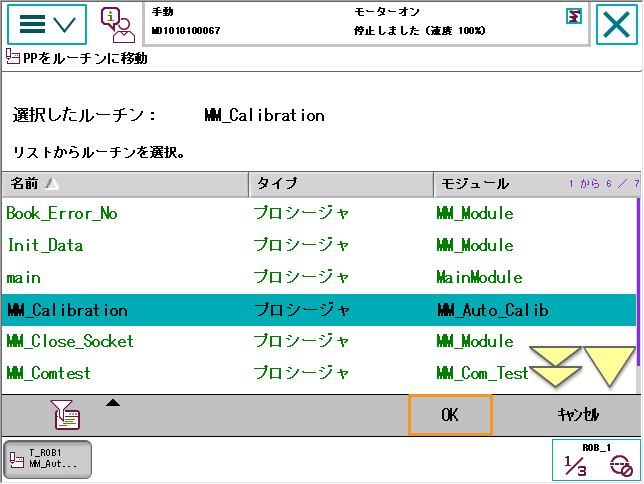
MM_Calibrationを選択してから、OK をクリックします。
-
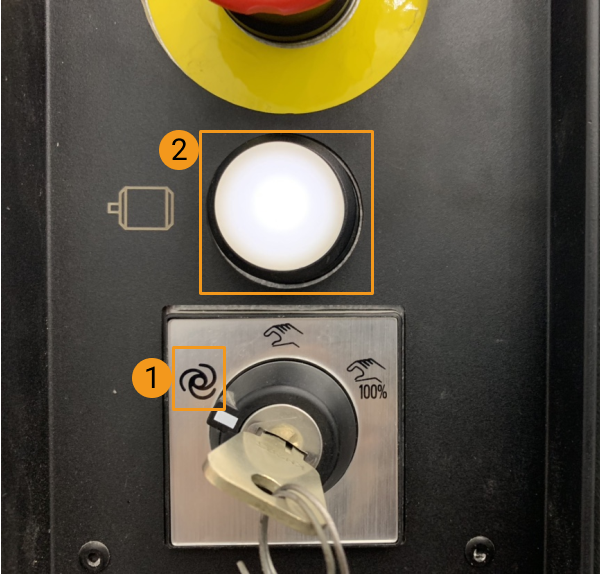
コントローラのスイッチを自動モードに回します。電源ボタンを押して、モーターのインジケーターが点灯していることを確認してください。
ティーチペンダント画面に警告「Auto Condition Reset」(プログラムポインタはMainプログラムにリセットされます)が表示された場合、その後のプログラムは正しく実行されません。
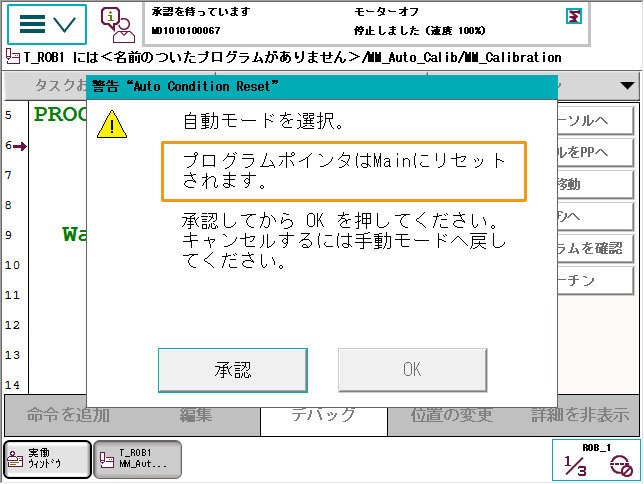
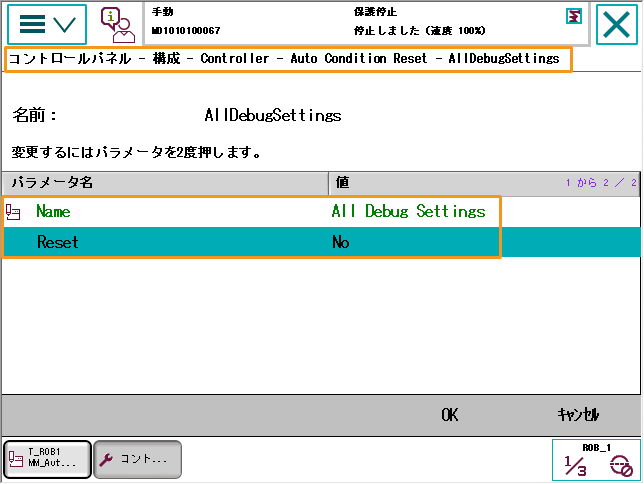
この場合、手動モードに切り替える必要があります。その後、 を選択し、ResetをNOに設定し、上記の手順3を再度実行します。
-
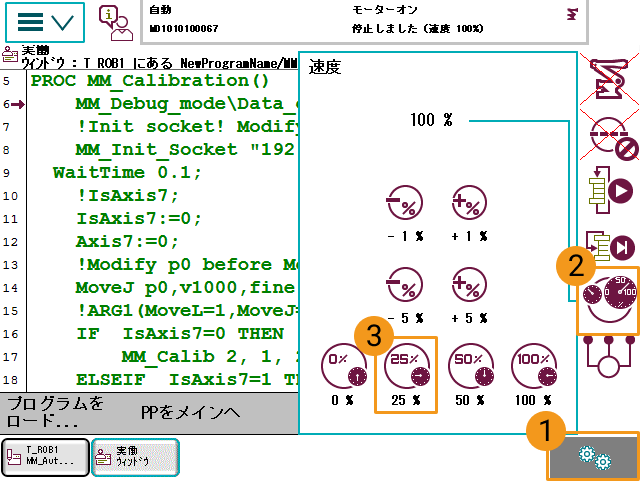
画面の右下隅にあるアイコンをクリックし、速度を25%に設定します。
-
下図のような画面で実行ボタンを押します。
-
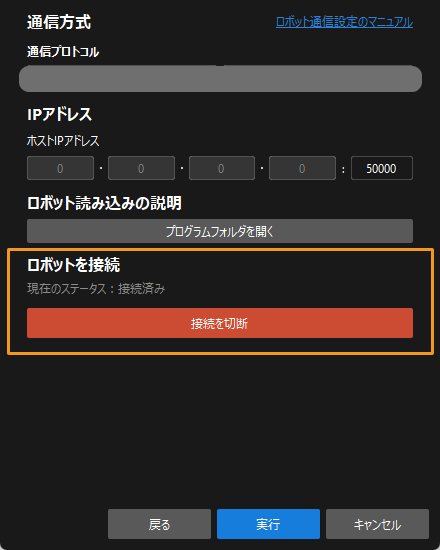
Mech-Visionの キャリブレーション 画面では、ロボットを接続 の下に「接続済み」の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、次へ をクリックします。
-
次に、キャリブレーションを実行 の4番目の手順(動作経路を設定)および残りの設定を実行します。以下の内容をご参照ください。