ABB RobotWare 6ロボットの自動キャリブレーション
以下では、ABB RobotWare 6ロボットが標準インターフェースでMech-Mindビジョンシステムと通信する際に、自動キャリブレーションを実行する方法について説明します。
事前準備
キャリブレーションの事前準備はカメラの取り付け方式によって異なります。詳細については、以下の内容をご参照ください。
-
カメラの取り付け方式はEye to handの場合、 自動キャリブレーション(Eye to hand) の 事前準備 をご参照ください。
-
カメラの取り付け方式はEye in handの場合、 自動キャリブレーション(Eye in hand) の 事前準備 をご参照ください。
キャリブレーション前の設定
-
Mech-Visionを起動し、ツールバーの カメラキャリブレーション(標準モード) をクリックします。すると、 キャリブレーション前の設定 画面が表示されます。
-
キャリブレーションの実行方法を選択 画面で、 新なキャリブレーションを開始 を選択し、 次へ をクリックします。
-
キャリブレーションのタスクを選択 画面で、ドロップダウンリストから 適応可能なロボットのハンド・アイ・キャリブレーション を選択し、 ロボット型番を選択 をクリックして型番を選択してから、 次へ をクリックします。
-
カメラの取り付け方式を選択 画面では、プロジェクトに使用されているカメラの取り付け方式に応じて選択してから、 次へ をクリックします。
-
実行モードとロボットの制御方式を選択 画面で、 自動キャリブレーション と 標準インターフェース を選択してから、 次へ をクリックします。
-
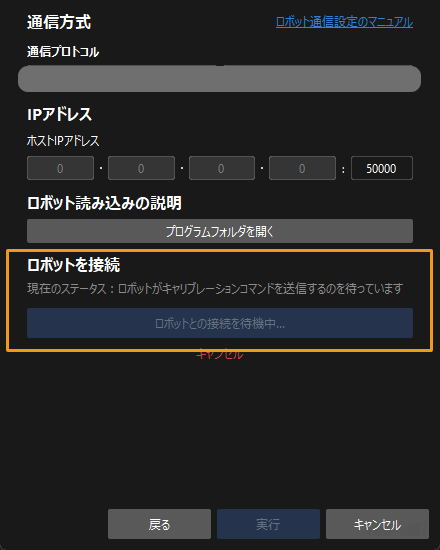
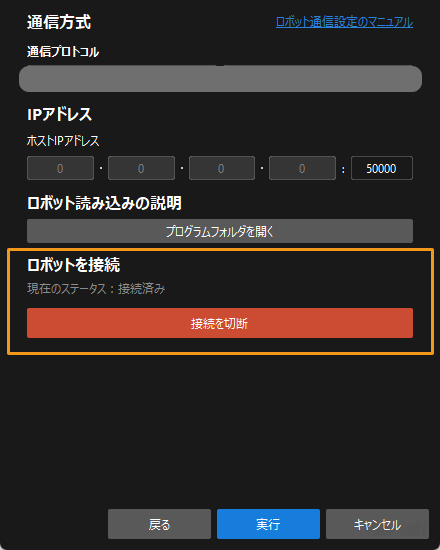
通信方式 画面では、 通信プロトコル は初期値を使用します。ロボットを接続 の下に インターフェースサービスを起動 が表示されている場合は、それをクリックすると、ボタンが ロボットとの接続を待機中… に変わります。
-
デフォルトでは、 ホストIPアドレス のポート番号は 50000 となります。50000といったポート番号を使用しない場合は、実際の状況に応じて変更してください。
-
この手順を完了した後、 キャリブレーション前の設定 画面を閉じないでください。
-
キャリブレーションプログラムの選択と変更
| 開始する前に、 標準インターフェースの通信設定 を完了させてください。 |
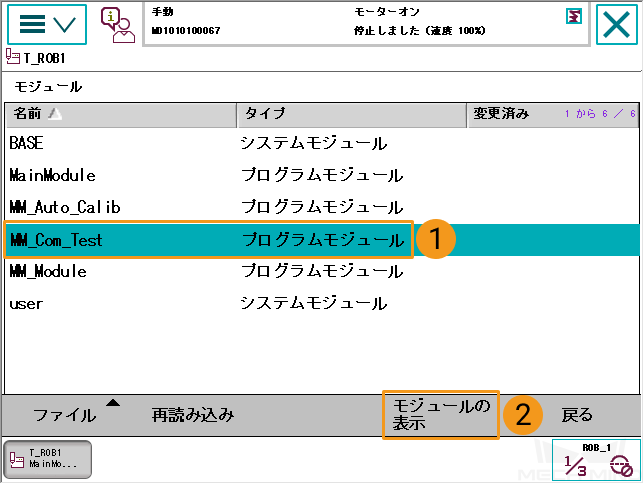
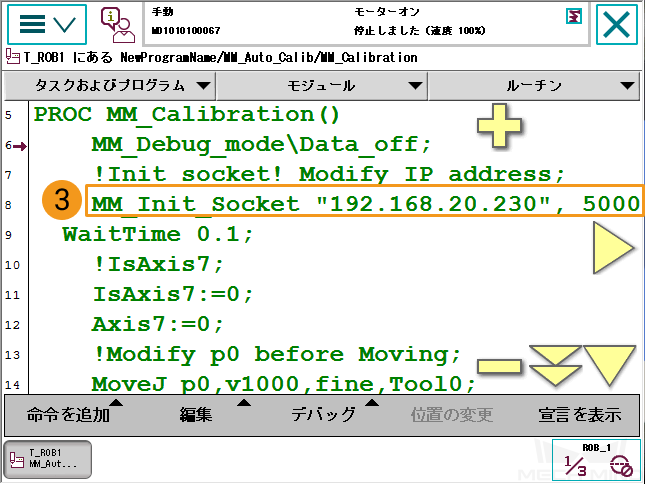
手動モードでは、 を順番に選択し、T_ROB1でMM_Auto_Calibプログラムモジュールを選択して開きます。プログラムのMM_Init_Socketコマンドの後のIPアドレスがIPCのIPアドレスと一致していること、ポート番号がMech-Visionで設定されたホストIPアドレスのポート番号と一致していることを確認します。詳細については、 通信テスト用プログラムの選択と変更 をご参照ください。
キャリブレーションの初期位置を設定
-
手動でロボットをキャリブレーションの初期位置に移動させます。
-
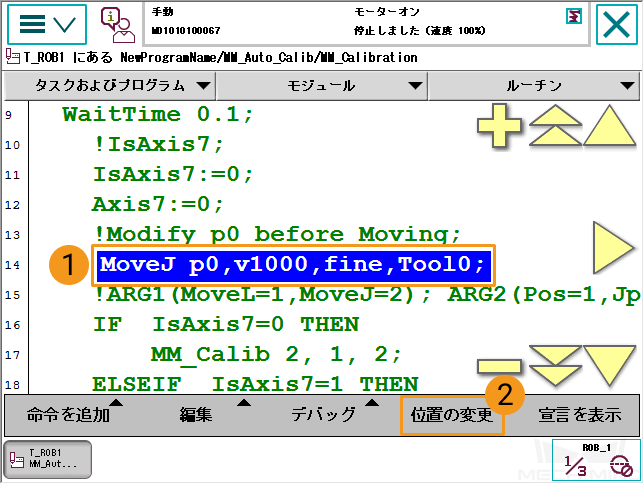
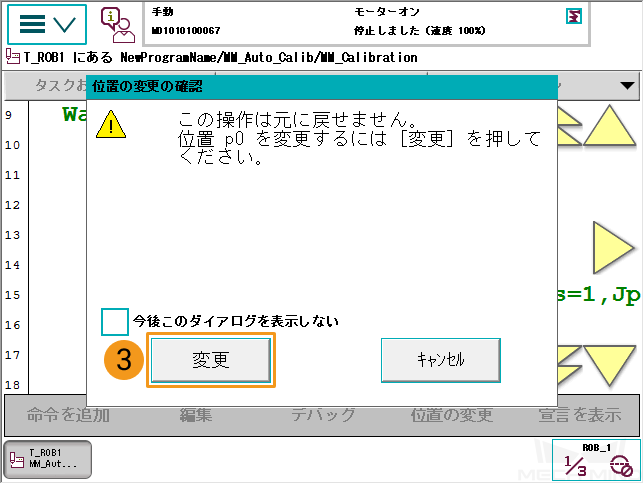
次のコード行を選択し、 位置の変更 をクリックします。「位置の変更の確認」画面がポップアップしますので、 変更 をクリックするとロボットの現在の位置姿勢がP0に保存されます。
-
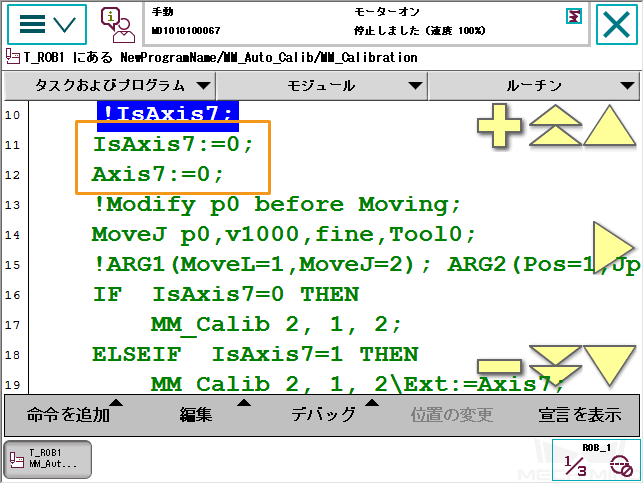
プロジェクト現場で7軸目としてロボット用レールを使用し、レールがロボットの動作によって制御する場合、「IsAxis7 :=0;」を「IsAxis7 :=1;」に変更し、かつ「Axis7 := XX;」を現在の7軸目の値に変更してください(ここで、XXは具体的な7軸目の値です)。レールを使用しない場合、またはレールがPLCによって制御されている場合は、この手順をスキップしてください。
キャリブレーションプログラムを実行
-
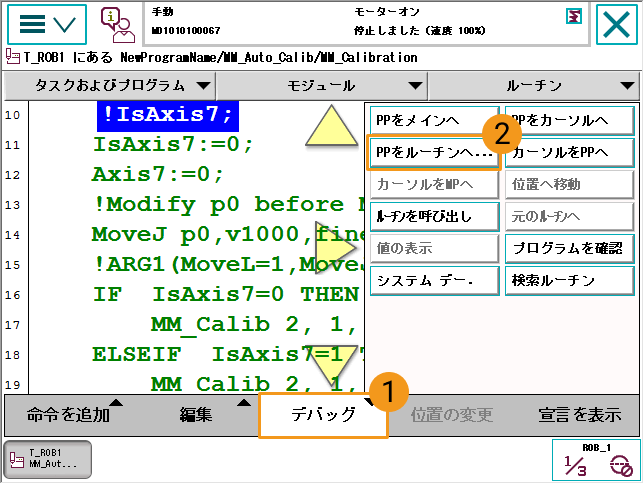
手動モードでは、MM_Auto_Calibプログラム画面で をクリックします。
-
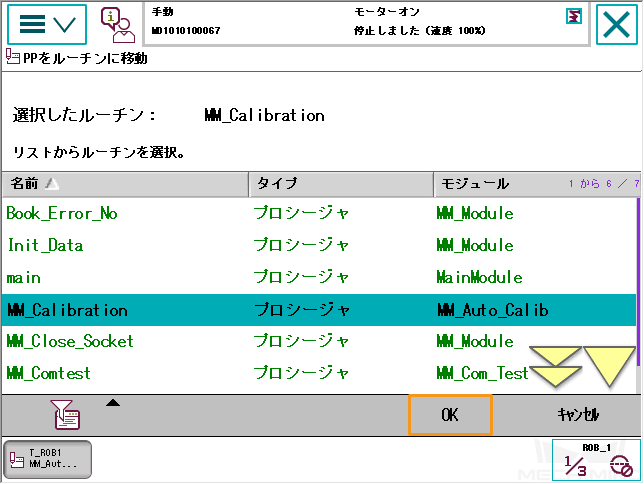
MM_Calibrationを選択してから、 OK をクリックします。
-
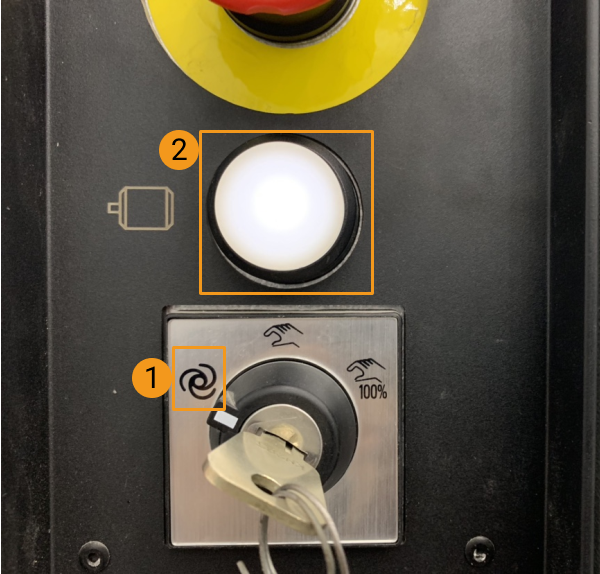
コントローラのスイッチを自動モードに切り替え、モーターのインジケーターが点灯していることを確認してください。
-
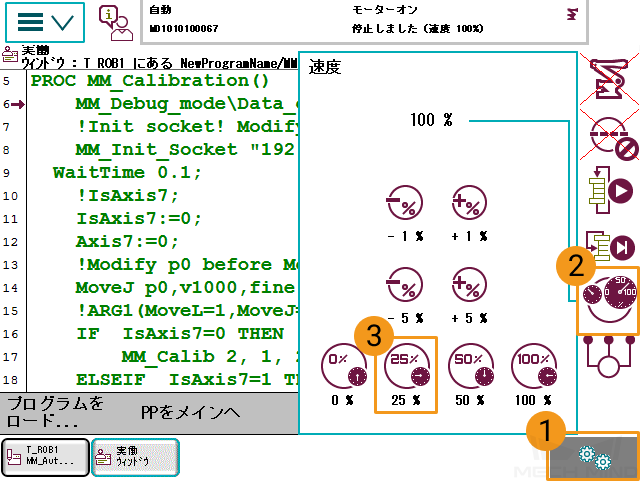
画面の右下隅にあるアイコンをクリックし、速度を25%に設定します。
-
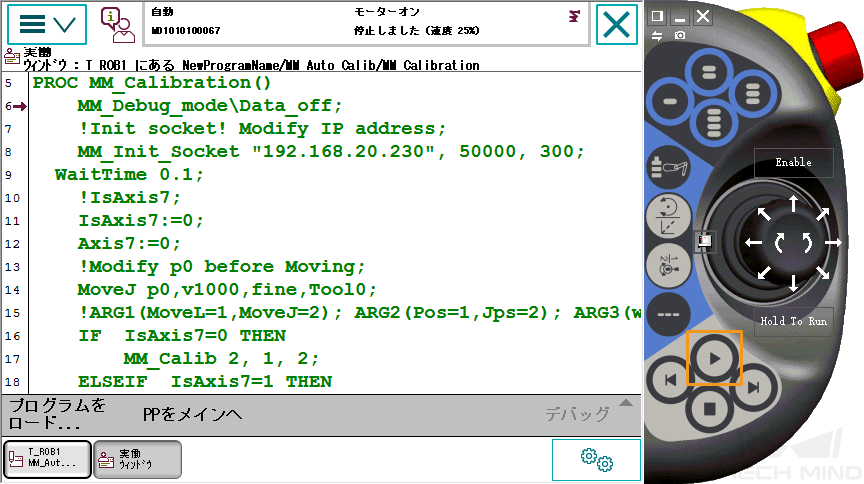
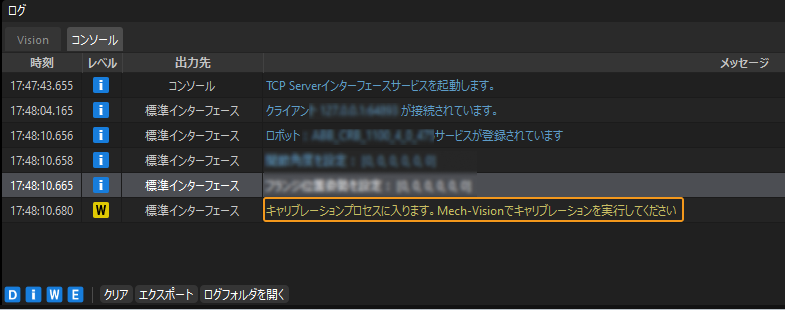
下図のような画面では、実行ボタンをクリックします。同時に、Mech-Visionの キャリブレーション前の設定 画面では、 ロボットを接続 の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、 実行 をクリックします。すると、「キャリブレーション(Eye to Hand)」画面が表示されます。
また、Mech-Visionのログバーの コンソール タブに関連メッセージが表示されます。
キャリブレーションの実行手順
キャリブレーションの実行手順はカメラの取り付け方式によって異なります。詳細については、以下の内容をご参照ください。
-
カメラの取り付け方式はEye to handの場合、 自動キャリブレーション(Eye to hand) の キャリブレーションの実行手順 をご参照ください。
-
カメラの取り付け方式はEye in handの場合、 自動キャリブレーション(Eye in hand) の キャリブレーションの実行手順 をご参照ください。
外部パラメータファイルの切替え
Mech-Visionプロジェクトがカメラの外部パラメータファイルを使用している場合、ハンド・アイ・キャリブレーションが完了したら、Mech-Visionプロジェクトに使用されている外部パラメータファイルを新しいものに切り替える必要があります。
-
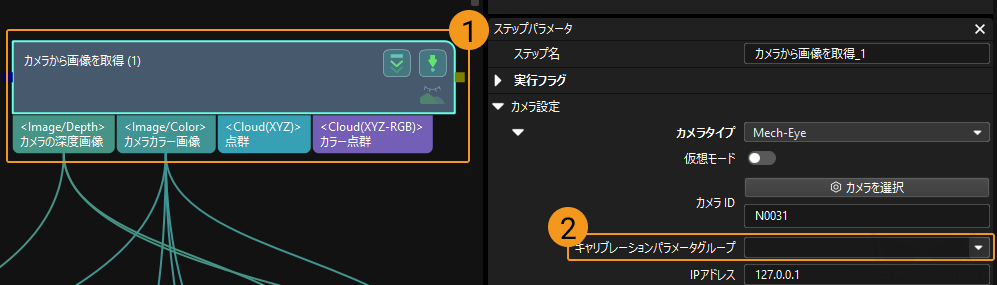
カメラから画像を取得 ステップを選択します。
-
ステップパラメータ から キャリブレーションパラメータグループ の
 をクリックし、表示される画面で新しい外部パラメータファイルを選択します。
をクリックし、表示される画面で新しい外部パラメータファイルを選択します。
キャリブレーションに関するステータスコード
自動キャリブレーションに標準インターフェース通信を使用する場合、ビジョンシステムからロボットに返されるデータにはステータスコードが含まれます。ステータスコードはコマンドの実行を示すために使用され、以下に示すような正常実行完了のコードとエラーコードがあります。