標準インターフェースコマンド
標準インターフェースを用いてロボットプログラミングを行う際は、以下の点にご注意ください。
-
複数の パラメータ はコロンで区切る必要があります。
-
全てのパラメータは ローカル変数 と定義します。
-
パラメータは 入力パラメータ あるいは 出力パラメータ と定義することが可能です。
-
入力引数は定数、グローバル変数、ローカル変数を指定することができます。出力引数はグローバル変数、ローカル変数を指定することができます。
|
以下のコマンドについて説明します。
通信の初期化
このコマンドは、TCP/IP通信のためのホストIPアドレス、ポート番号、および待機時間を設定するために使用されます。このコマンドを呼び出した後、TCP/IP通信接続の確立 を呼び出すと、ロボットとビジョンシステム間のTCP/IP通信接続が確立されます。
TCP/IP通信接続の確立
このコマンドは、ロボットとビジョンシステム間のTCP/IP通信接続を確立するために使用されます。このコマンドは 通信の初期化 の後に呼び出す必要があります。
Mech-Visionプロジェクトの実行
このコマンドは、Mech-Vizを使用せずMech-Visionを使用する場合に使用します。このコマンドを実行すると、Mech-Visionプロジェクトが実行され、カメラ撮影とビジョン処理による認識が行われます。
入力パラメータ
Job
Mech-Visionのプロジェクト番号は、Mech-Visionのプロジェクトリストで確認できます。プロジェクト名の前の数字は、プロジェクト番号を表します。
Pos_Num_Need
ビジョンポイントの期待数で、Mech-Visionから取得したいビジョンポイントの数です。ビジョンポイントの情報に、ビジョン位置姿勢およびそれに対応する点群、ラベル、スケーリングの情報が含まれています。
-
0:Mech-Visionプロジェクトで認識できたすべてのビジョンポイントを取得します。 -
0より大きな整数:Mech-Visionプロジェクトで認識できた指定数のビジョンポイントを取得します。-
このパラメータの値が認識されたビジョンポイントの合計数より大きい場合、認識結果にあるすべてのビジョンポイントを取得します。
-
このパラメータの値が認識されたビジョンポイントの合計数より小さい場合、このパラメータで指定された数のビジョンポイントを取得します。
-
|
SendPos_Type
「ロボット位置姿勢のタイプ」パラメータは、ロボット実機の位置姿勢をMech-Visionに送信するタイプを設定します。パラメータ範囲は0~3です。
-
0:ロボットの位置姿勢をビジョンシステムに送信する必要はありません。プロジェクトがEye to Handモードである場合、画像撮影はロボットの位置姿勢とは関係なく、Mech-Visionはロボットの位置姿勢を必要としません。 -
1:ロボットの位置姿勢を「ロボットの現在の関節角度+フランジ位置姿勢」の形式でビジョンシステムに送信します。Eye in Handのプロジェクトでは、このパラメータを推奨します。Mech-Visionプロジェクトの「経路計画」ステップでは、ロボットから返された関節角度を使用します。フランジ位置姿勢がすべてゼロの場合、フランジデータは無視されます。 -
2:ロボットの位置姿勢を現在のフランジ位置姿勢の形式でビジョンシステムに送信します。Eye In Handのプロジェクトで、ロボットが関節角度データがなく、フランジ位置姿勢のみがある場合(直行ロボットなど)に適しています。 -
3:ロボットの位置姿勢をカスタマイズされた関節角度の形式(ユーザーにより設定された関節角度の変数を読み込む)でビジョンシステムに送信します。Eye To Handプロジェクトでは、このパラメータを推奨します。Mech-Visionプロジェクトの「経路計画」ステップはロボットが送信する関節角度を初期位置姿勢として使用します。
MM_J
ユーザーによりカスタマイズされた関節角度です。SendPos_Typeパラメータ値を3に設定した場合、この関節角度は最初の経路点としてMech-Visionプロジェクトの「経路計画」ステップに送信します。SendPos_Typeパラメータの値が3以外の場合、ここでの関節角度は使用されませんが、必ず設定する必要があります。
ビジョン目標点の取得
「Mech-Visionプロジェクトの実行」コマンドの後に使用されます。Mech-Visionの認識結果(ビジョンポイント)に対応するロボット位置姿勢とラベルを取得します。ロボットの位置姿勢はツール位置姿勢(TCP)の形式です。
Mech-Centerは、ビジョンポイントを対応するロボットTCPに自動的に変換します。変換過程は次の通りです。
-
ビジョンポイントに含まれる位置姿勢をX軸を中心に180°回転させます。
-
対応するロボット型番の基準座標系定義にロボットベースの高さが含まれているかどうかを認識し、それに応じて垂直方向のオフセットを増やします。
| 102コマンドは毎回最大20個までのTCPを取得することができます。20個以上のTCPを取得したい場合、すべてのTCPを得るまで、102コマンドを繰り返し実行してください。 |
出力パラメータ
Pos_Num
このコマンドを実行して、取得したTCPの数です。
-
リクエストしたTCP数はMech-Visionによって認識されたビジョンポイントの数よりも多い場合、Mech-Visionによって認識されたビジョンポイントの数に従って送信されます。
-
リクエストしたTCP数はMech-Visionによって認識されたビジョンポイントの数よりも少ない場合、リクエストした数に従って送信されます。
デフォルトの範囲は0~20です。
変数型:num
MM_Status
コマンドが正常に実行された場合、 1100 のステータスコードが返されます。エラーが発生した場合、エラーを表すエラーコードが返されます。
このコマンドを呼び出す時、Mech-Visionの結果が返されていない場合に、ビジョンシステムはMech-Visionから結果を返すまで待機して、受信した結果をロボットへ送信します。デフォルト待ち時間は10sと設定され、タイムアウトになった場合、タイムアウトエラーを表すステータスコードが返されます。
変数型:num
Mech-Vizプロジェクトの実行
このコマンドは、Mech-VisionとMech-Vizの両方を使用する場合に使われます。Mech-Vizプロジェクトを実行し、対応するMech-Visionプロジェクトを呼び出し、Mech-VizがMech-Visionのビジョン結果に基づいてロボットの動作経路を計画する時に使用されます。
Mech-Vizでは、 自動的に読み込む にチェックを入れる必要があります。
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある Mech-Center/tool/viz_project フォルダにはサンプルプロジェクトが格納され、それら基づいて修正することが可能です。
入力パラメータ
SendPos_Type
ロボット位置姿勢のタイプです。パラメータ範囲は0~2です。
0:Mech-Vizにロボットの位置姿勢を送信する必要はありません。Mech-Vizでの仮想ロボットは関節角度[0,0,0,0,0,0]から一番目の経路点に移動します。
1:Mech-Vizにロボットの現在の関節角度とフランジ位置姿勢を送信します。Mech-Vizでの仮想ロボットは現在の関節角度から一番目の経路点に移動します。
2:Mech-Vizに事前定義された関節角度を送信します。Mech-Vizでの仮想ロボットは現在設定された関節角度から一番目の経路点に移動します。
| ロボットが関節角度[0, 0, 0, 0, 0, 0]から最初の経路点に移動するときに、シーン内の衝突モデルがロボットに干渉する場合は、位置姿勢タイプを1に設定する必要があります。 |
MM_J
ユーザーによりカスタマイズされた関節角度です。SendPos_Typeパラメータ値を2に設定した場合、この関節角度は最初の経路点としてMech-Vizに送信します。SendPos_Typeパラメータの値が2以外の場合、ここでの関節角度は使用されませんが、必ず設定する必要があります。
Mech-Vizによって計画された動作経路を取得
「Mech-Vizプロジェクトを起動」 のコマンドを実行した後、このコマンドはMech-Vizが計画した経路を取得するために使用されます。このコマンドを実行した後、 取得したロボットのツール位置姿勢(TCP)を保存 または 取得した関節角度を保存 を呼び出して位置姿勢データを取得できます。
このコマンドは毎回最大20個まで計画経路にある経路点を取得することができます。そのため、このコマンドを繰り返して実行する場合があります。
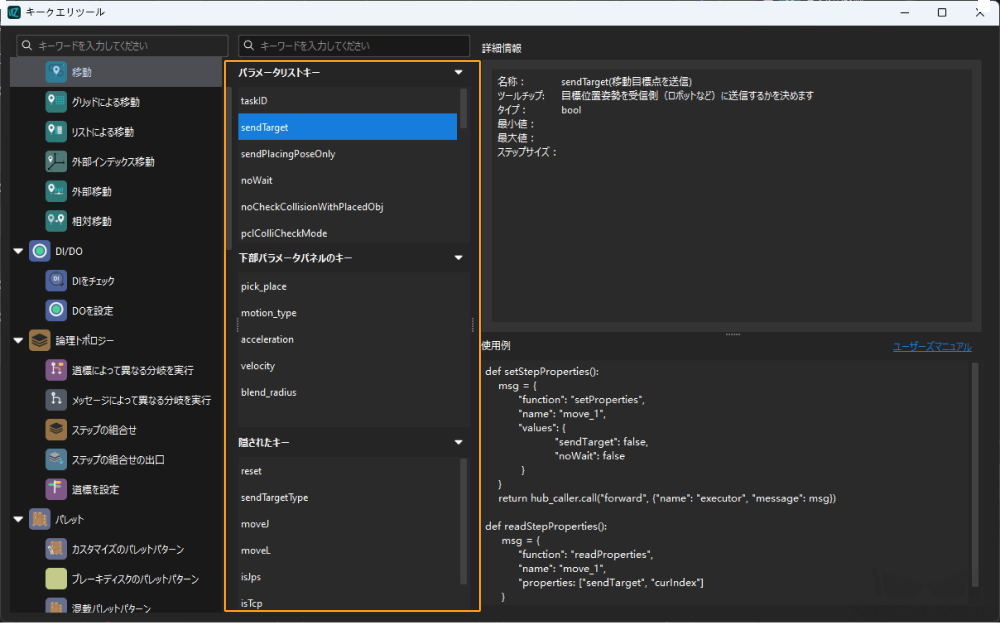
| プロジェクト内の移動ステップの経路点をロボットに送信しない場合は、ステップパラメータで「移動目標点を送信」のチェックを外してください。 |
入力パラメータ
Jps_Pos
経路点の位置姿勢タイプで、Mech-Vizが返す位置姿勢の形式を指定するために使用されます。
-
1:経路点の位置姿勢は、ロボットの関節角度(JPs)の形式で返されます。 関節角度データは 取得した関節角度を保存 を呼び出し後にのみ取得可能です。 -
2:経路点の位置姿勢は、ロボットのツール位置姿勢(TCP)の形式で返されます。TCP位置姿勢データは 取得したロボットのツール位置姿勢(TCP)を保存 を呼び出した後にのみ取得可能です。
出力パラメータ
Pos_Num
経路点の数です。このパラメータは今回このコマンドを実行して、返された経路にある経路点の数を表します([位置姿勢、ラベル、速度(%)])。
経路に20個以上の経路点がある場合、このコマンドを繰り返して実行してください。
デフォルトの範囲は0~20です。
VisPos_Num
「ビジョン処理による移動」の位置、つまり「ビジョン処理による移動」ステップの経路点が経路全体における位置です。「ビジョン処理による移動」は、ビジョンポイントへ移動する移動ステップです。
例えば、「移動_1 ->移動_2 -> ビジョン処理による移動 ->移動_3」のロジックにおいて、ステップ「ビジョン処理による移動」の位置は3です。
ステップ「ビジョン処理による移動」がなければ、このパラメータは0です。
MM_Status
ステータスコード。
コマンドが正常に実行された場合、 2100 のステータスコードが返されます。エラーが発生した場合、エラーを表すエラーコードが返されます。
| このコマンドを実行する時、Mech-Vizから結果が返されていない場合(まだ実行中)、ビジョンシステムはMech-Vizからの結果を待って、それをロボットに送信します。デフォルトの場合、タイムアウト時間は10秒であり、待ち時間が超えるとタイムアウトエラーをロボットに返します。 |
取得したロボットのツール位置姿勢(TCP)を保存
取得した関節角度を保存
Mech-Visionのパラメータレシピの切替
Mech-Visionプロジェクトにパラメータレシピを切り替えます。
パラメータレシピを切り替えることで、Mech-Visionプロジェクトの各ステップのパラメータを変更することができます。
パラメータレシピには点群マッチングモデル、画像マッチングテンプレート、ROI、信頼度のしきい値などのパラメータの設定が含まれています。
| このコマンドは、「Mech-Visionプロジェクトの実行」コマンドの前に実行する必要があります。 |
Mech-Viz分岐を選択
Mech-Vizプロジェクトに「メッセージによって異なる分岐を実行」ステップがある場合、このコマンドはMech-Vizにある「メッセージによって異なる分岐を実行」ステップを指定された出口に沿って実行し続けることを制御します。
このコマンドは、「Mech-Vizプロジェクトの実行」コマンドの後に実行する必要があります。
Mech-Vizプロジェクトが「メッセージによって異なる分岐を実行」に実行すると、このコマンドによって出口を指定するのを待ちます。
移動インデックスを設定
このコマンドはMech-Vizステップの 現在のインデックス パラメータを設定する場合に使われます。このパラメータが設定可能なステップは「リストによる移動」、「グリッドによる移動」、「カスタマイズのパレットパターン」、「事前計画パレットパターン」などです。
このコマンドは、「Mech-Vizプロジェクトの実行」コマンドの後に実行する必要があります。
入力パラメータ
Skill_Num
ステップID。
このパラメータはどのステップがインデックスを設定する必要かを指定します。
このパラメータ、つまり、インデックス付きのステップのステップIDは正の整数である必要があります。ステップIDは、ステップパラメータで読み取りを行います。
Index_Num
次にこのステップが実行されたときに設定されるべき 現在のインデックス の値です。
このコマンドを送信すると、Mech-Vizの 現在のインデックス 値がこのパラメータの値から1を引いた値に変更されます。
このコマンドで指定したステップに Mech-Viz プロジェクトが実行されると、 Mech-Viz の 現在のインデックス値 が、このパラメータの値まで1つずつ増加します。
ソフトウェアのステータスを取得
Mech-Visionプロジェクトへ対象物の寸法を送信
このパラメータはMech-Visionプロジェクトに、対象物の寸法を動的に送信する場合に使われます。Mech-Visionプロジェクトを実行する前に対象物の寸法を確認する必要があります。
Mech-Vision プロジェクトに「対象物の寸法を読み込む」ステップがあり、 パラメータから対象物の寸法を読み込む にチェックを入れる必要があります。
吸盤のDO信号を取得
このコマンドは、Mech-VisionまたはMech-Vizによって計画されたDOリストを取得するために使用されます。ロボットは MM_Set_DoList により、取得したDO信号のリストをロボットハンドに適用します。
吸盤のDO信号を設定
このサンプルを実行すると、Mech-VisionまたはMech-Vizから取得したDO信号がGO信号に設定されます。最大4グループで、各グループは16bitのGO信号を格納しています。 複数のグループのGO信号を設定する場合は、このコマンドを繰り返してください。
| このコマンドはMM_Get_DoListの後で呼び出す必要があります。 |
キャリブレーション
このコマンドは、ハンド・アイ・キャリブレーションを行う場合に使われます(カメラ外部パラメータのキャリブレーション)。
このコマンドを実行すると、Mech-Visionとキャリブレーションの状態を同期し、Mech-Visionからキャリブレーションポイントを取得します。
キャリブレーションを完成するために、このコマンドを繰り返して実行する必要があります。
Mech-Visionのカスタマイズされたデータを取得
MM_GET_DY_DATAで取得したカスタマイスされたデータを各変数に割り当てる
このコマンドは最初のカスタマイズされたデータを指定したデータに従って異なる変数に保存するために使用されます。 Mech-Visionのカスタマイズされたデータを取得 コマンドを実行した後に使用する必要があります。
入力パラメータ
Serial
num型の変数。インデックス値を指定するために使用されます。つまり、どのビジョンポイントでのカスタマイズされたデータを取得するために使用されます(データの順番はMech-Visionの送信順です)。
「ビジョン処理による移動」の計画データまたはカスタマイズされたデータを取得
このコマンドは、Mech-Visionプロジェクトの「ビジョン処理による移動」の計画結果、またはMech-Vizプロジェクトの「ビジョン処理による移動」の計画結果またはカスタマイズされたデータを取得するために使用されます。 MM_Get_PlanPoseまたはMM_Get_PlanJpsにより、取得したデータを各変数に割り当てることができます。
入力パラメータ
Resource
num型の変数。「ビジョン処理による移動」の計画データのソースを指定します。
-
0:Mech-Vizから「ビジョン処理による移動」の計画データを取得します。
-
正整数:Mech-Visionから「ビジョン処理による移動」の計画データを取得します。ここで設定された正整数はMech-Visionプロジェクト番号となります。
Jps_Pos
num型の変数。返されたデータの予期形式です。
-
Resourceが0の場合、Jps_Pos パラメータの値の範囲は1~4です。
Jps_Pos パラメータ値 返されたデータの予期形式 説明 1
位置姿勢(JPs形式),移動方式,ツール番号,速度,カスタマイズされたデータ1,...,カスタマイズされたデータN
2
位置姿勢(TCP形式),移動方式,ツール番号,速度カスタマイズされたデータ1,...,カスタマイズされたデータN
3
位置姿勢(JPs形式),移動方式,ツール番号,速度,Mech-Vizの「ビジョン処理による移動」の計画結果,カスタマイズされたデータ1,...,カスタマイズされたデータN
4
位置姿勢(TCP形式),移動方式,ツール番号,速度,Mech-Vizの「ビジョン処理による移動」の計画結果,カスタマイズされたデータ1,...,カスタマイズされたデータN
-
Resourceが正整数の場合、Jps_Pos パラメータの値の範囲は1~2です。
Jps_Pos パラメータ値 返されたデータの予期形式 説明 1
位置姿勢(JPs形式)、移動方式、ツール番号、速度、Mech-Visionの「ビジョン処理による移動」の計画結果
2
位置姿勢(TCP形式)、移動方式、ツール番号、速度、Mech-Visionの「ビジョン処理による移動」の計画結果
位置姿勢
経路点の位置姿勢は、ロボット関節角度(JPs、単位は度)、ツール位置姿勢(TCP、3次元座標はミリメートル、オイラー角は度)のいずれかであり、その形式は送信するコマンドパラメータに依存します。
移動方式
-
1:関節運動。
-
2:直線運動。
ツール番号
ロボットがその経路点に移動するときに使用するロボットハンドの番号です。-1である場合、ロボットハンドが使用されないことを示します。
速度
経路点の速度値です。
「ビジョン処理による移動」の計画データ
Mech-VisionまたはMech-Vizの「ビジョン処理による移動」ステップが計画されたデータのことで、把持するワークのラベル、把持されたワークの合計数、今回把持されたワークの数、吸盤のエッジコーナー番号、TCPオフセット、ワーク群の向き、単体ワークの向き、ワーク群の寸法が含まれます。
カスタイズされたデータ
Mech-Visionプロジェクトの「出力」ステップでポートタイプが「カスタム」に設定された場合に出力されたposesとlabelsポート以外のカスタマイズされたポートのデータです。
カスタマイズされたデータは、ポート名のA–Zの順に並べられています。
MM_GET_PLANDATAから取得したデータを変数に保存
このコマンドは 「ビジョン処理による移動」の計画データまたはカスタマイズされたデータを取得 の後に使用され、取得したデータを異なる変数に格納するために使用されます。「ビジョン処理による移動」の計画データまたはカスタマイズされたデータを取得 コマンドで指定されたJps_Posパラメータ値に従って、異なるプログラムを選択します。
プログラム
MM_Get_PlanPose Serial,Jps_Pos,MM_P,MM_MoveType,MM_ToolNum,MM_Speed; (Jps_Pos=2またはJps_Pos=4の場合)
MM_Get_PlanJps Serial,Jps_Pos,MM_J,MM_MoveType,MM_ToolNum,MM_Speed; (Jps_Pos=1またはJps_Pos=3の場合)入力パラメータ
Serial
num型の変数。グローバル配列で取得する経路点を指定するために使用されます(データの順番はMech-Vizの出力における経路点の順番に従います)。
Jps_Pos
num型の変数。MM_GET_PLANDATAのJps_Posの値と一致する必要があります。
出力パラメータ
MM_P
robtarget型の変数。指定した経路点が対応するTCPデータ(プログラム1に使用)を保存するために使用されます。
MM_J
Jointtarget型の変数。指定した経路点が対応する関節角度データ(プログラム2に使用)を保存するために使用されます。
MM_MoveType
num型の変数。指定した経路点が対応する移動方式を保存するために使用されます。
MM_ToolNum
num型の変数。指定した経路点が対応するツール番号を保存するために使用されます。
MM_Speed
num型の変数。指定した経路点が対応する速度を保存するために使用されます。
MM_UserData
定義済みのグローバル配列変数(ユーザーはこのパラメータを送信する必要はなく、配列を読み込むだけでよい)。指定した経路点に対応するカスタマイズされたデータを保存するために使用されます。
MM_Plan_Results
定義済みのグローバル配列変数(ユーザーはこのパラメータを送信する必要はなく、配列を読み込むだけでよい)。指定した経路点が対応する「ビジョン処理による移動」の計画結果を保存するために使用されます。配列のサイズは21です。
配列変数MM_Plan_Resultsの詳細を下表に示します。
| データ | 説明 | 変数 |
|---|---|---|
把持するワークのラベル |
10個の整数で構成され、デフォルトは10個のゼロです。 |
MM_Plan_Results[1] ~ MM_Plan_Results[10] |
把持されたワークの合計数 |
累計で把持されたワークの数です。 |
MM_Plan_Results[11] |
今回把持されたワークの数となります。 |
今回把持されたワークの数となります。 |
MM_Plan_Results[12] |
吸盤のエッジコーナー番号 |
この吸盤に使用されているエッジコーナー番号です。 |
MM_Plan_Results[13] |
TCPオフセット |
ロボットハンド中心からのワーク群の中心のXYZオフセットです。 |
MM_Plan_Results[14] ~ MM_Plan_Results[16] |
ワークグループの向き |
吸盤の長辺に対するワーク群の向きです。0は平行、1は垂直を意味します。 |
MM_Plan_Results[17] |
単体ワークの向き |
吸盤の長辺に対する単体ワークの向きです。0は平行、1は垂直を意味します。 |
MM_Plan_Results[18] |
ワーク群の寸法 |
今回把持されたワーク群の長さ、幅、高さです。 |
MM_Plan_Results[19] ~ MM_Plan_Results[21] |
サンプル
-
サンプル1:
MM_Get_PlanPose 2,4,P10,MoveType,ToolNum,Speed;MM_GET_PLANDATAが実行後、このサンプルを実行すると、Mech-Vizが計画した2番目の経路点のTCPデータをP10変数に、移動方式、ツール番号、速度をそれぞれMoveType、ToolNum、Speed変数に保存します。この経路点がビジョン処理による移動の経路点でない場合、もっと情報は提供されません。「ビジョン処理による移動」の経路点である場合、「ビジョン処理による移動」の計画結果がMM_Plan_Resultsグローバル配列に保存され、カスタマイズされたデータがMM_UserDataグローバル配列に保存されます。
-
サンプル2:
MM_Get_PlanJps 1,3,jpose1,MoveType,ToolNum,Speed;MM_GET_PLANDATAが実行後、このサンプルを実行すると、Mech-Vizが計画した最初の経路点の関節角度データをjpose1変数に、移動方式、ツール番号、速度をそれぞれMoveType、ToolNum、Speed変数に保存します。この経路点がビジョン処理による移動の経路点でない場合、もっと情報は提供されません。「ビジョン処理による移動」の経路点である場合、「ビジョン処理による移動」の計画結果がMM_Plan_Resultsグローバル配列に保存され、カスタマイズされたデータがMM_UserDataグローバル配列に保存されます。
Mech-Visionの「経路計画」ステップの結果を取得
Mech-Visionプロジェクトを実行した後、このコマンドはMech-Visionプロジェクトの「経路計画」ステップから出力された衝突のない把持経路を取得するために使用されます。
このコマンドを使用する時、Mech-Visionの「出力」ステップの ポートタイプ を「事前定義済み(ロボット経路)」に設定する必要があります。
入力パラメータ
Job
num型の変数。Mech-Visionのプロジェクト番号は、Mech-Visionのプロジェクトリストで確認できます。プロジェクト名の前の数字は、プロジェクト番号を表します。
Jps_Pos
num型の変数。「経路計画」ステップから返された経路点の位置姿勢タイプを指定するために使用されます。
-
1:経路点の位置姿勢は関節角度(JPs)の形式で返されます。 -
2:経路点の位置姿勢はロボットのツール(TCP)位置姿勢の形式で返されます。
Mech-Visionプロジェクトを実行して結果を取得
このコマンドは、Mech-Visionプロジェクトに使用されるパラメータレシピを設定し(プロジェクトにパラメータレシピがない場合はスキップします)、Mech-Visionプロジェクトを実行し、ビジョンシステムの出力結果(ビジョンポイント、経路点、またはカスタマイズされたデータ)を返します。このコマンドは、 Mech-Visionのパラメータレシピの切替 、 Mech-Visionプロジェクトの実行 、 ビジョン目標点の取得 、 Mech-Visionの「経路計画」ステップの結果を取得 および Mech-Visionのカスタマイズされたデータを取得 を組み合わせたものです。
| このコマンドは、最大20の位置姿勢データを返します。取得した位置姿勢の数が20より大きい場合は、このコマンドではなく、 Mech-Visionのパラメータレシピの切替 、 Mech-Visionプロジェクトの実行 、 ビジョン目標点の取得 、 Mech-Visionの「経路計画」ステップの結果を取得 および Mech-Visionのカスタマイズされたデータを取得 コマンドを使用してください。 |
入力パラメータ
Job
num型の変数。Mech-Visionのプロジェクト番号は、Mech-Visionのプロジェクトリストで確認できます。プロジェクト名の前の数字は、プロジェクト番号を示します。
Model_Number
num型の変数。Mech-Visionプロジェクト内のパラメータレシピの番号であり、番号の有効範囲は0~99です。0は、Mech-Visionプロジェクトがレシピパラメータを使用しないことを意味します。
Recv_Data_Type
num型の変数。ビジョンシステムから返されるデータタイプを指定します。値の範囲は1~4です。
-
1:ビジョンシステムがビジョンポイント(カスタマイズされたデータなし)を返します。その後、 MM_Get_Pose を呼び出して、指定した変数にビジョンポイントの位置姿勢を保存する必要があります。 -
2:ビジョンシステムがビジョンポイント(カスタマイズされたデータあり)を返します。その後、 MM_Get_DyPose を呼び出して、指定した変数にビジョンポイントのカスタマイズされたデータを保存する必要があります。 -
3:ビジョンシステムが経路点(位置姿勢の形式が関節角度)を返します。その後、 MM_Get_Jps を呼び出して、指定した変数に経路点の位置姿勢データを保存する必要があります。 -
4:ビジョンシステムが経路点(位置姿勢の形式がTCP)を返します。その後、 MM_Get_Pose を呼び出して、指定した変数に経路点の位置姿勢データを保存する必要があります。
出力パラメータ
MM_Status
num型の変数。このコマンドを実行した後に返されたステータスコードを保存するために使用されます。
Pos_Num(オプション)
num型の変数。このコマンドを実行した後に返されたビジョンポイントまたは経路点の数を保存するために使用されます。
VisPos_Num(オプション)
num型の変数。このパラメータの値は、 Recv_Data_Type が3または4の場合に有効になります。「経路計画」ステップで設定された最初の「ビジョン処理による移動」の経路点が経路全体における位置番号を保存します。例えば、「移動_1、移動_2、ビジョン処理による移動、移動_3」の場合、ビジョン処理による移動の位置は3です。「ビジョン処理による移動」がなければ、このパラメータは0です。
Mech-Vizプロジェクトを実行して経路を計画
このコマンドは、Mech-Vizプロジェクトを実行し、分岐ステップの出口を設定し(プロジェクトに分岐ステップがない場合はスキップします)、Mech-Vizプロジェクトの計画された経路を返します。このコマンドは、 Mech-Vizプロジェクトの実行、Mech-Viz分岐を選択 および Mech-Vizによって計画された動作経路を取得 を組み合わせたものです。
| このコマンドは、最大20の位置姿勢データを返します。取得した位置姿勢の数が20より大きい場合は、このコマンドではなく、 Mech-Vizプロジェクトの実行、Mech-Viz分岐を選択 および Mech-Vizによって計画された動作経路を取得 コマンドを使用してください。 |
入力パラメータ
Branch_Num
num型の変数。分岐ステップの番号を指定します。値の範囲は0~99です。0は、Mech-Vizプロジェクトが「メッセージによって異なる分岐を実行」ステップを使用しないことを意味します。
Export_Num
num型の変数。「メッセージによって異なる分岐を実行」ステップの出口番号を指定します。その値は正整数です。このパラメータをNに設定すると、Mech-Vizプロジェクトは「メッセージによって異なる分岐を実行」ステップのN-1に沿って実行を継続します。
Recv_Data_Type
num型の変数。ビジョンシステムから返されるデータタイプを指定します。値の範囲は1~2です。
-
1:ビジョンシステムが経路点(位置姿勢の形式が関節角度)を返します。その後、 MM_Get_Jps を呼び出して、指定した変数に経路点の位置姿勢データを保存する必要があります。 -
2:ビジョンシステムが経路点(位置姿勢の形式がTCP)を返します。その後、 MM_Get_Pose を呼び出して、指定した変数に経路点の位置姿勢データを保存する必要があります。
Mech-Vizのステップパラメータを読み取る
このコマンドは、Mech-Vizプロジェクトで指定されたステップパラメータの値を読み取るために使用されます。
入力パラメータ
Get_Id
このパラメータは、property_configファイルで指定された 構成ID フィールドとなります。
|
Mech-Visionでは、ツールバーの をクリックし、 プロパティ設定 をクリックしてproperty_configファイルを開きます。 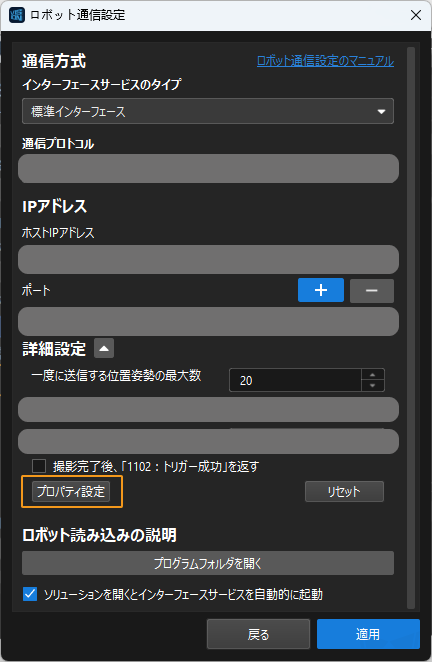
|
このコマンドを使用する前に、あらかじめproperty_configファイルに、ステップ番号と、パラメータ名に対応するキー名を、以下の形式で指定しておく必要があります。
read,構成ID,ステップ番号,パラメータ名に対応するキー名
read |
ステップパラメータ値の読取りに使用する行を指定します。 |
構成ID |
唯一の番号を正の整数で指定します。1つの構成IDは、1つのステップパラメータ値を読み取るためにのみ使用できます。複数のステップパラメータ値を読み取る場合は、異なる構成IDを使用してください。 |
ステップ番号 |
読み取るパラメータが属するステップの番号を指定します。 |
キー名 |
読み込むパラメータに対応するキー名を指定します。 |
|
|
property_configファイルには複数のreadコマンドを設定することができますが、各readコマンドの構成IDは一意である必要があります。 |
Mech-Vizのステップパラメータを設定
このコマンドは、Mech-Vizプロジェクトで指定されたステップパラメータの値を設定するために使用されます。
入力パラメータ
Set_Id
このパラメータは、property_configファイルで指定された 構成ID フィールドとなります。
|
Mech-Visionでは、ツールバーの をクリックし、 プロパティ設定 をクリックしてproperty_configファイルを開きます。
|
このコマンドを使用する前に、あらかじめproperty_configファイルに、ステップ番号、パラメータ名に対応するキー名とパラメータ値を、以下の形式で指定しておく必要があります。
write,構成ID,ステップ番号,パラメータ名に対応するキー名,パラメータ値
write |
ステップパラメータ値の設定に使用する行を指定します。 |
構成ID |
番号(一意でない)を正の整数で指定します。 |
ステップ番号 |
設定するパラメータが属するステップの番号を指定します。 |
キー名 |
設定するパラメータに対応するキー名を指定します。 |
パラメータ値 |
設定するパラメータ値を指定します。 |
|
サンプル
例えば、property_configファイルの内容は、1が構成ID、3がステップ番号、xOffset、yOffset、zOffsetがキー名、10がxOffsetに対応するパラメータ値、20がyOffsetに対応するパラメータ値、30がzOffsetに対応するパラメータ値を示します。
write, 1, 3, xOffset, 10
write, 1, 3, yOffset, 20
write, 1, 3, zOffset, 30ロボットが以下のコマンドを送信した後、Mech-VizはxOffset、yOffsetとzOffsのパラメータ値をそれぞれ10、20と30に設定します。
MM_Set_Property 1,MM_Status;このサンプルを実行すると、xOffset、yOffsetとzOffsに対応するパラメータ値がそれぞれ10、20と30に設定され、返されたステータスコードがMM_Status変数に保存されます。