キャリブレーションの操作手順
本節では、標準インターフェース通信を用いたABBロボットの自動キャリブレーションについて説明します。
| 開始する前に 標準インターフェースの通信設定 を参照してロボットプログラムの読み込みを完了しました。 |
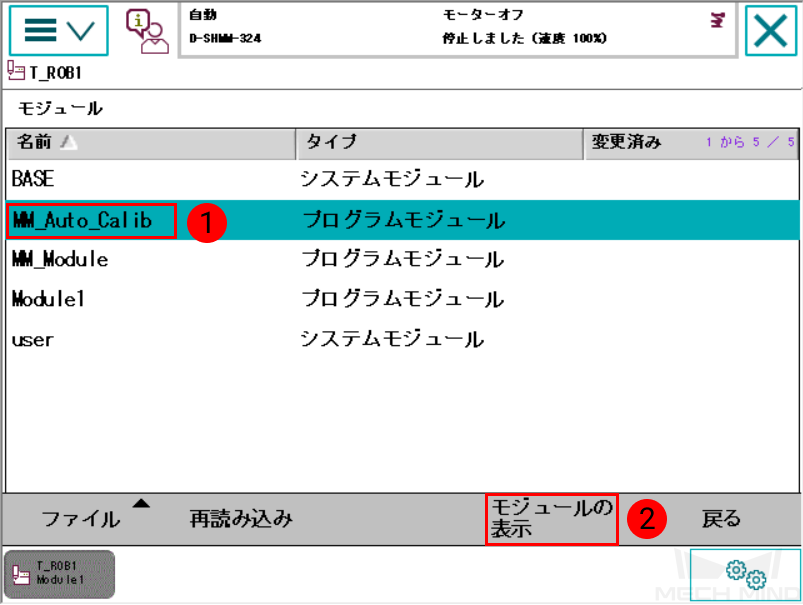
キャリブレーションするためのプログラムを開く
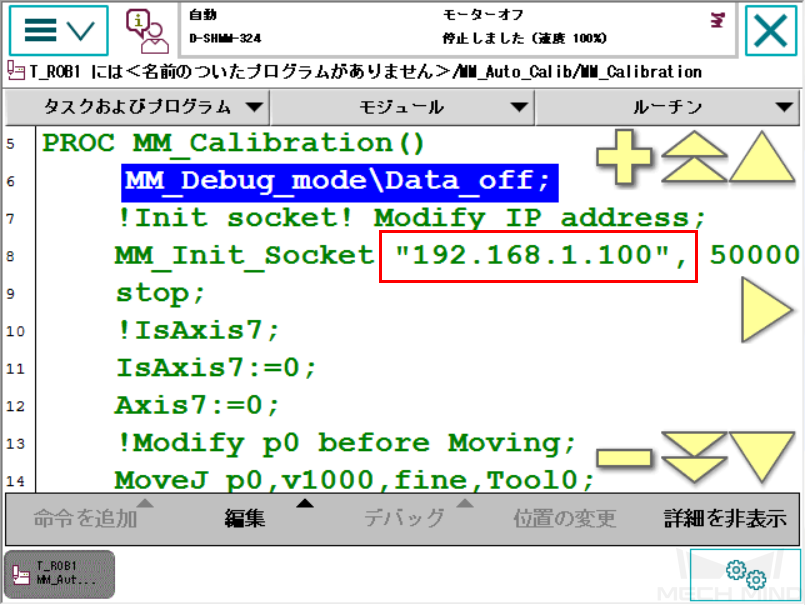
ティーチペンダントで、 を順番に選択し、T_ROB1でMM_Auto_Calibを選択して開きます。プログラム中のIPアドレスがIPCのIPであること、ポート番号が正しいことを確認します。
キャリブレーションの初期位置を設定
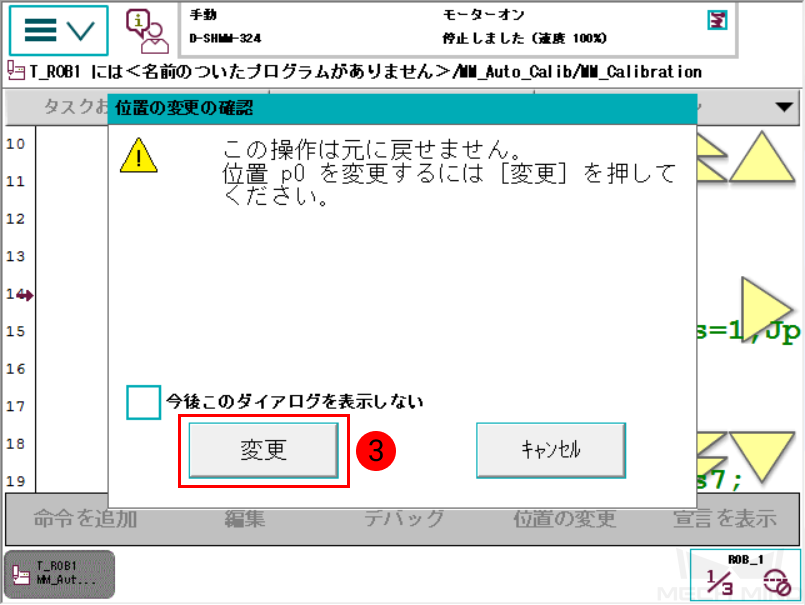
ロボットを手動でキャリブレーションの初期位置に移動した後、位置姿勢をP0に変更し、ポップアップウィンドウで 変更 をクリックします。
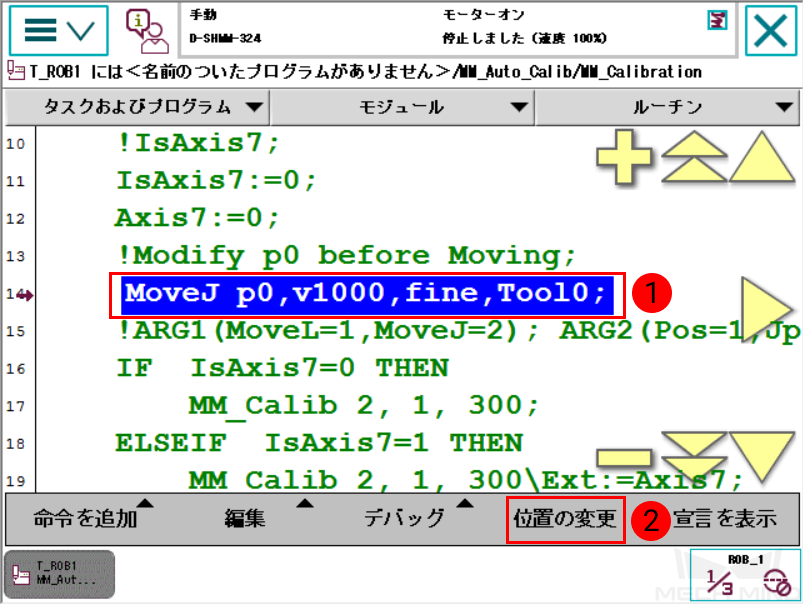
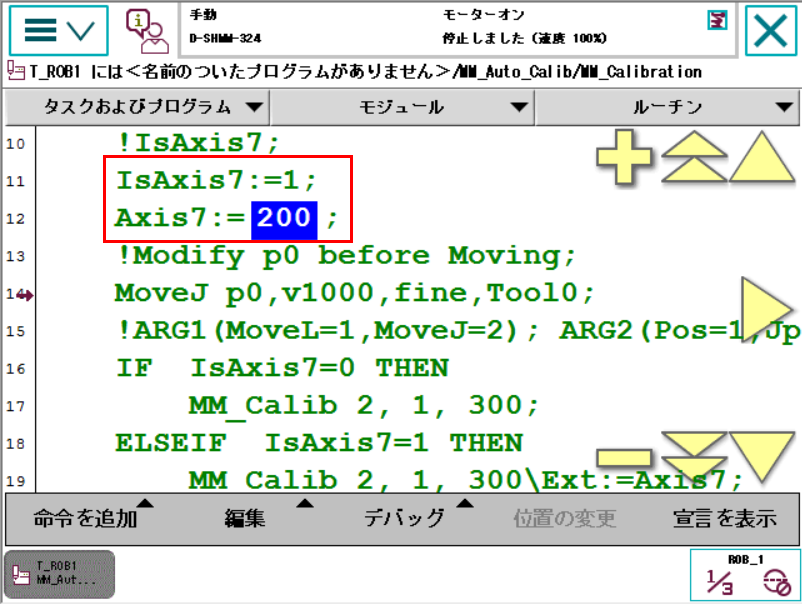
下図に示すように、現場に7軸レールがあり、レールがロボットの移動によって制御する場合は、「IsAxis7 :=0;」を「IsAxis7 :=1;」に変更し、Axis7を7軸の現在の値に変更してください。レールがない場合、またはレールがPLCによって制御されている場合は、この手順をスキップしてください。
キャリブレーションプログラムを実行
-
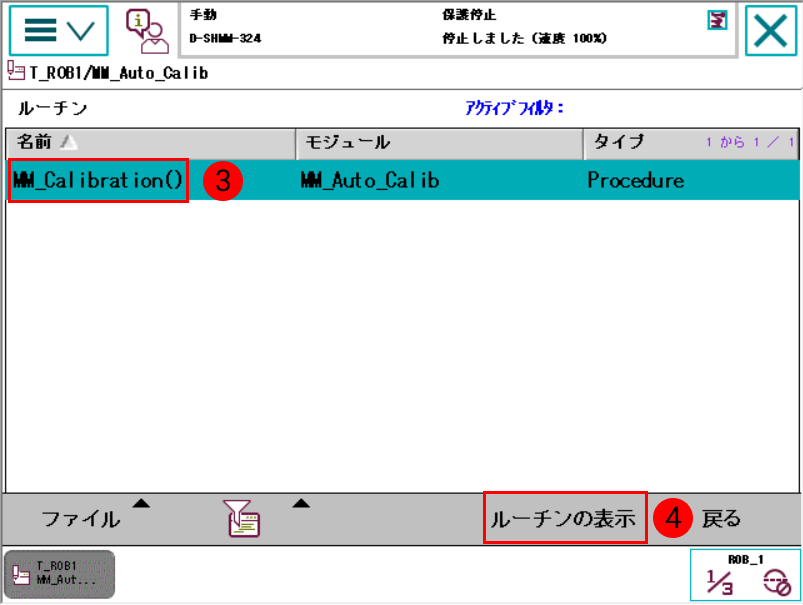
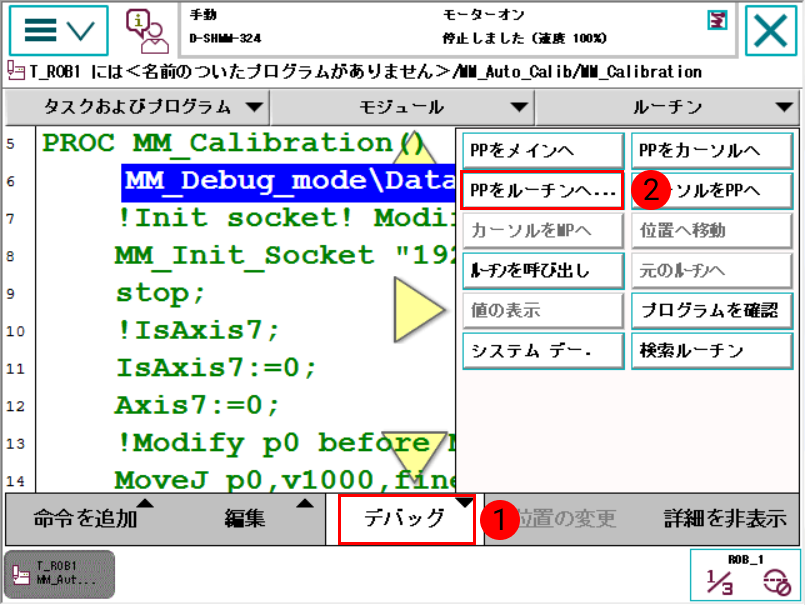
をクリックします。
-
MM_Calibrationを選択した後、 OK をクリックします。

-
 をクリックして、プログラムポインターが17行目に移動するまでプログラムを実行します。
をクリックして、プログラムポインターが17行目に移動するまでプログラムを実行します。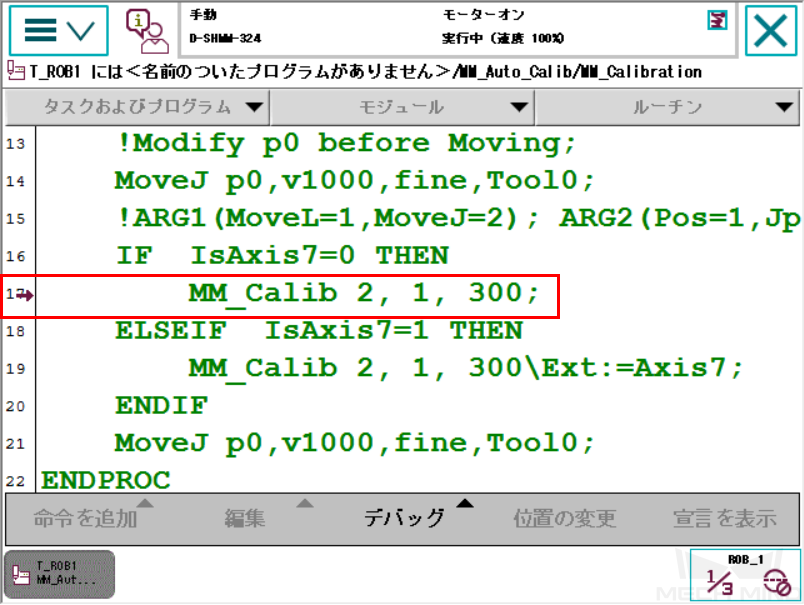
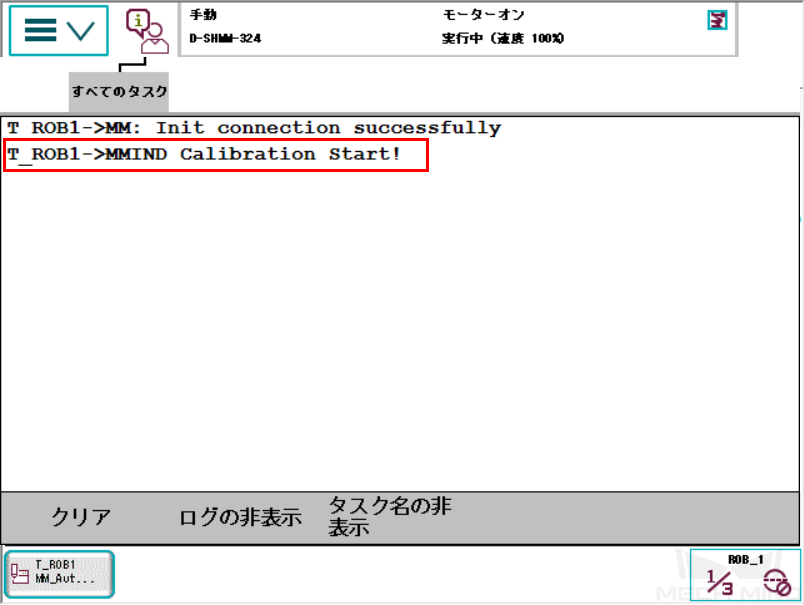
キャリブレーションを実行するには、以下の2つのメッセージが必要です。
-
ティーチペンダントのログに表示されたメッセージ:
-
Mech-VisionのログバーのConsoleタブに、「キャリブレーションプロセスに入ります、Mech-Visionでキャリブレーションを開始してください」と表示されます。
それで、キャリブレーションを実行することができます。
Mech-Visionでキャリブレーションを実行
-
Mech-Visionを起動し、 カメラキャリブレーション(標準モード) をクリックするか、またはメニューバーで を順番にクリックしてキャリブレーションツールを起動します。
-
カメラの取り付け方式に応じて、ソフトウェアの指示に従って残りの操作を行います。
-
Eye to Handの場合、 自動キャリブレーション(Eye to Hand) をご参照ください。
-
Eye in Handの場合、 自動キャリブレーション(Eye in Hand) をご参照ください。
-
| ロボットが60秒以内に次の経路点に到達しない場合、Mech-Visionはタイムアウトエラーが発生します。この場合、ティーチペンダントでキャリブレーションプログラムを再度選択し、最初の行から実行し、Mech-Visionでキャリブレーションを再開する必要があります。 |