キャリブレーションの操作手順
本節では、標準インターフェース通信を用いたFANUCロボットの自動キャリブレーションについて説明します。
| 開始する前に 標準インターフェースの通信設定 を参照してロボットプログラムの読み込みを完了しました。 |
キャリブレーションするためのプログラムを開く
ティーチペンダントの 一覧 をクリックしてプログラム選択画面に入り、カーソルを MM_AUTO_CALIB プログラムに移動し、 入力 をクリックしてプログラムを開きます。

キャリブレーションの初期位置を設定
-
プログラムを開いた後、ティーチペンダントの
ステップをクリックしてロボットをステップモードに切り替えると、ティーチペンダントのディスプレイの ステップ が黄色に変わります。

-
ティーチペンダントの背面にあるイネーブルスイッチを押します(どちらでもかまいません)。ロボットを手動でキャリブレーションの開始位置に移動させます。自動キャリブレーションの開始点はキャリブレーション経路の最下層中央にあります。

-
カーソルを2行目の命令に移動し、
シフトと前進を同時に押しながら2行目の命令を実行し、ユーザー座標系0が使用されていることを示します。 -
カーソルを3行目の命令に移動し、
シフトと前進を同時に押しながら3行目の命令を実行し、ツール座標系1が使用されていることを示します。 -
カーソルを [100] に移動し、 をクリックします。
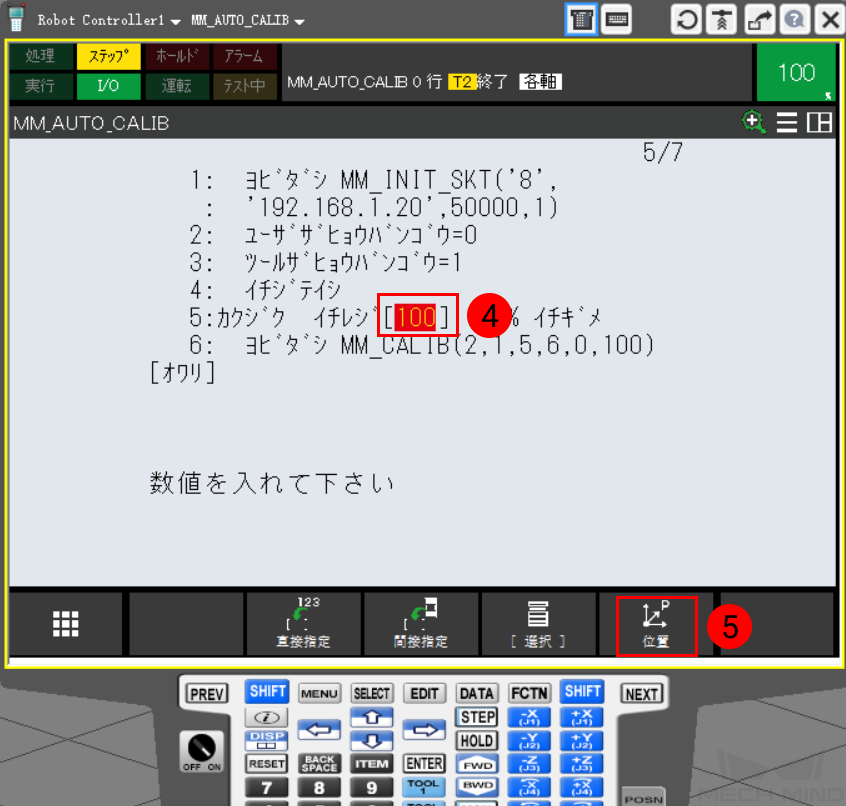

-
完了 をクリックします。

-
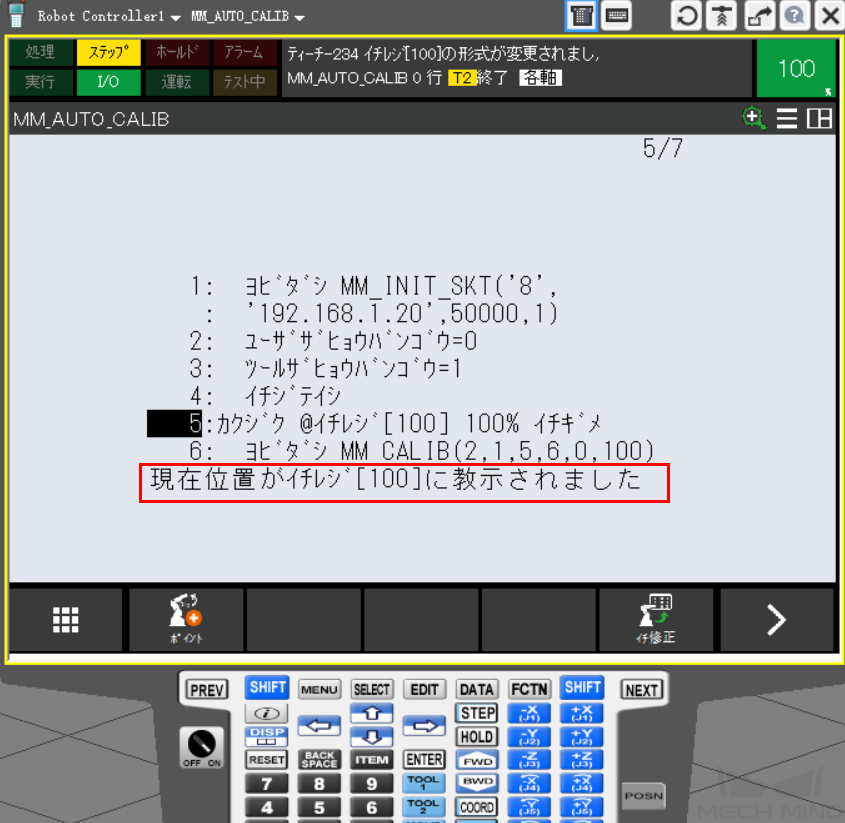
下図に示すように、カーソルを先頭に移動します。次に、ティーチペンダントの
シフトと イチ修正 を同時にクリックすると、以下のメッセージが表示されます。この時点で、キャリブレーション済みの開始位置がPRPR[100]に保存されます。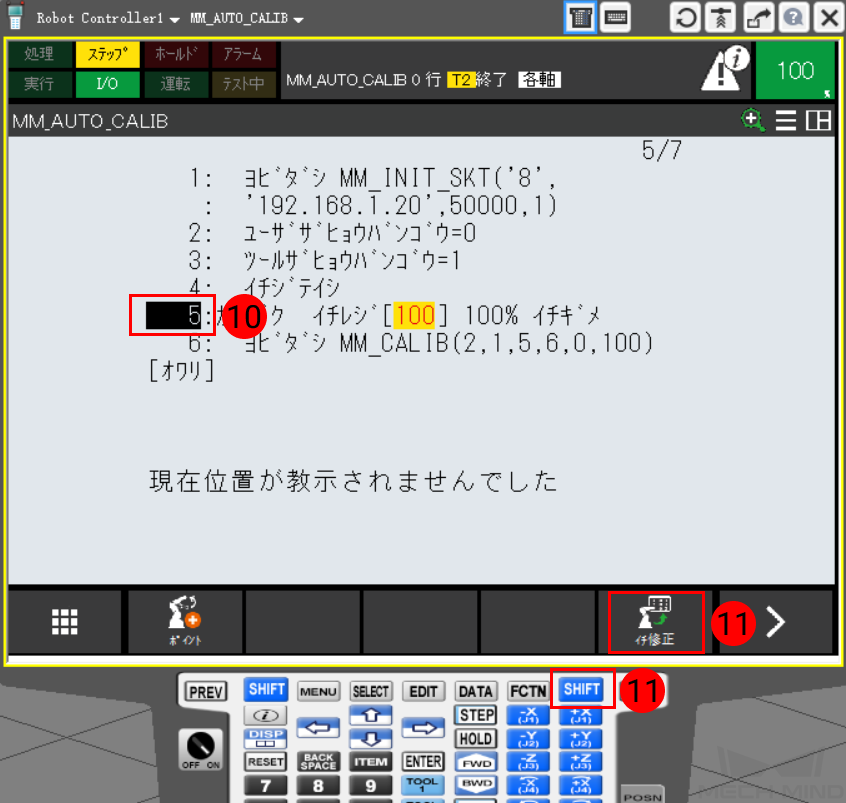
-
ティーチペンダントの
ステップをクリックし、左上が示している ステップモード を終了します。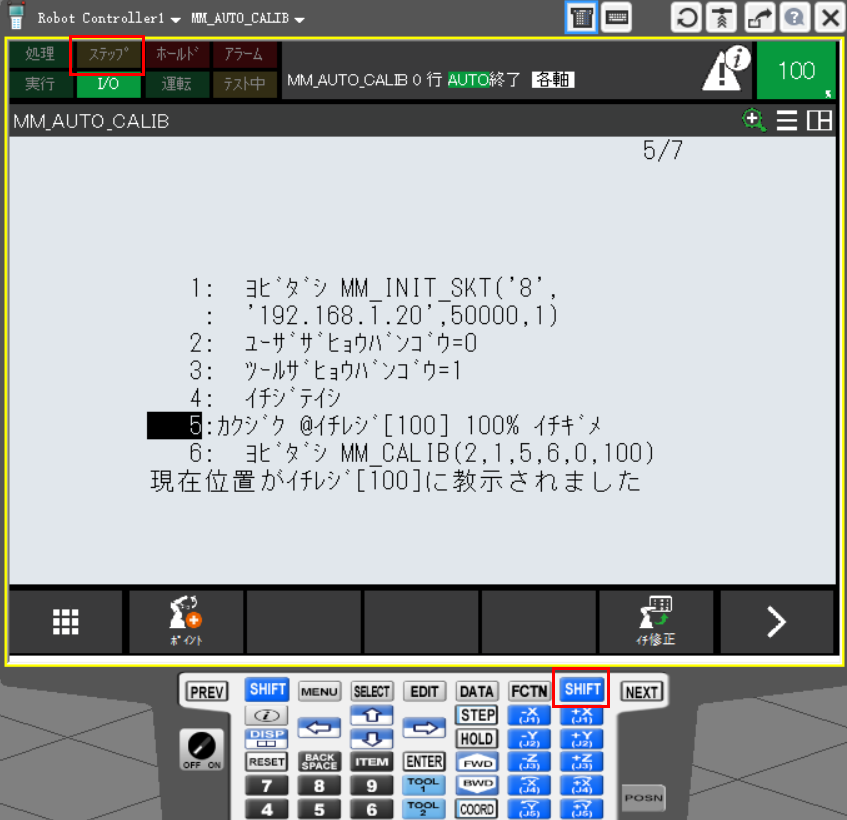
キャリブレーションプログラムを実行
-
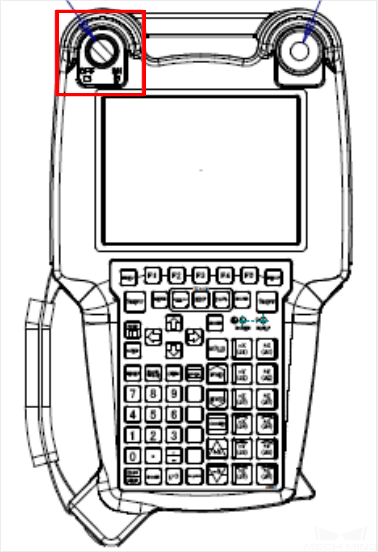
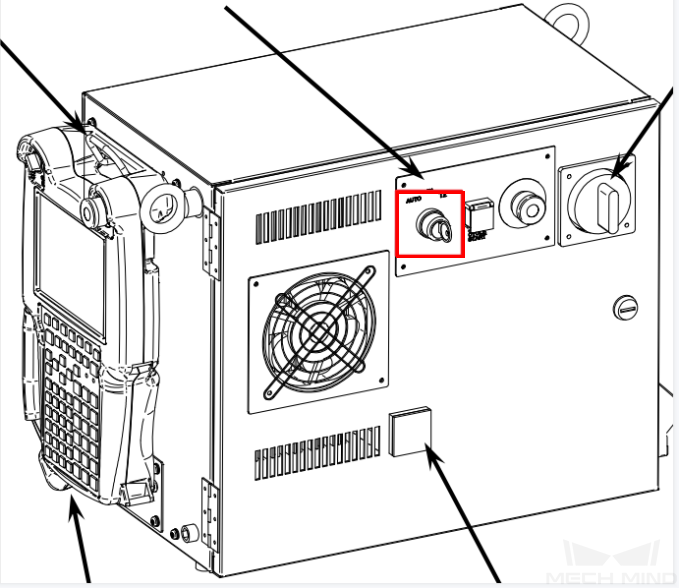
下図に示すように、ティーチペンダントのスイッチを OFF に、コントローラのスイッチが AUTO に回すと、ロボットは自動モードに切り替えられます。
-
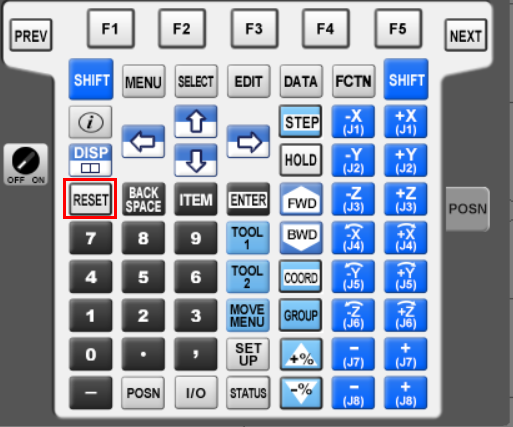
ティーチペンダントの リセット を押してすべてのアラームを解除し、速度が10~20%であることを確認します。
-
コントローラでの緑のボタンを押すと、キャリブレーションプログラムが自動的に実行されます。
-
すると、Mech-VisionログのConsoleタブに「キャリブレーションプロセスに入ります。Mech-Visionでキャリブレーションを実行してください。」が表示されます。
Mech-Visionでキャリブレーションを実行
-
Mech-Visionを起動し、 カメラキャリブレーション(標準モード) をクリックするか、またはメニューバーで を順番にクリックしてキャリブレーションツールを起動します。
-
カメラの取り付け方式に応じて、ソフトウェアの指示に従って残りの操作を行います。
-
Eye to Handの場合、 自動キャリブレーション(Eye to Hand) をご参照ください。
-
Eye in Handの場合、 自動キャリブレーション(Eye in Hand) をご参照ください。
-
| ロボットが60秒以内に次の経路点に到達しない場合、Mech-Visionはタイムアウトエラーが発生します。この場合、ティーチペンダントでキャリブレーションプログラムを再度選択し、最初の行から実行し、Mech-Visionでキャリブレーションを再開する必要があります。 |