UR(ユニバーサルロボット)
本節では、VizによりURロボットをティーチングする方法について説明します。
ロボットの運動がURスクリプトによって制御されるため、コントロールがロボットにURスクリプトを送信することでロボットの制御することができます。
|
ネットワーク接続を確立
ロボットを起動してLANケーブルをコントローラのLANポートに接続します。
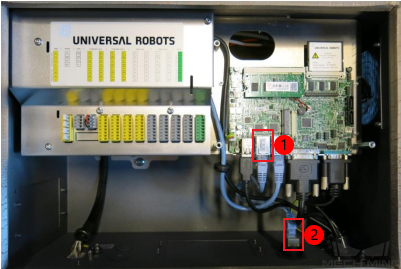
①はコントローラのLANポートで、②はデフォルトのLANポートです。
|
LANケーブルのオス・メスの延長によるネットワークの不安定を回避するために、①LANポートを使用することを推奨します。 |

IP設定
-
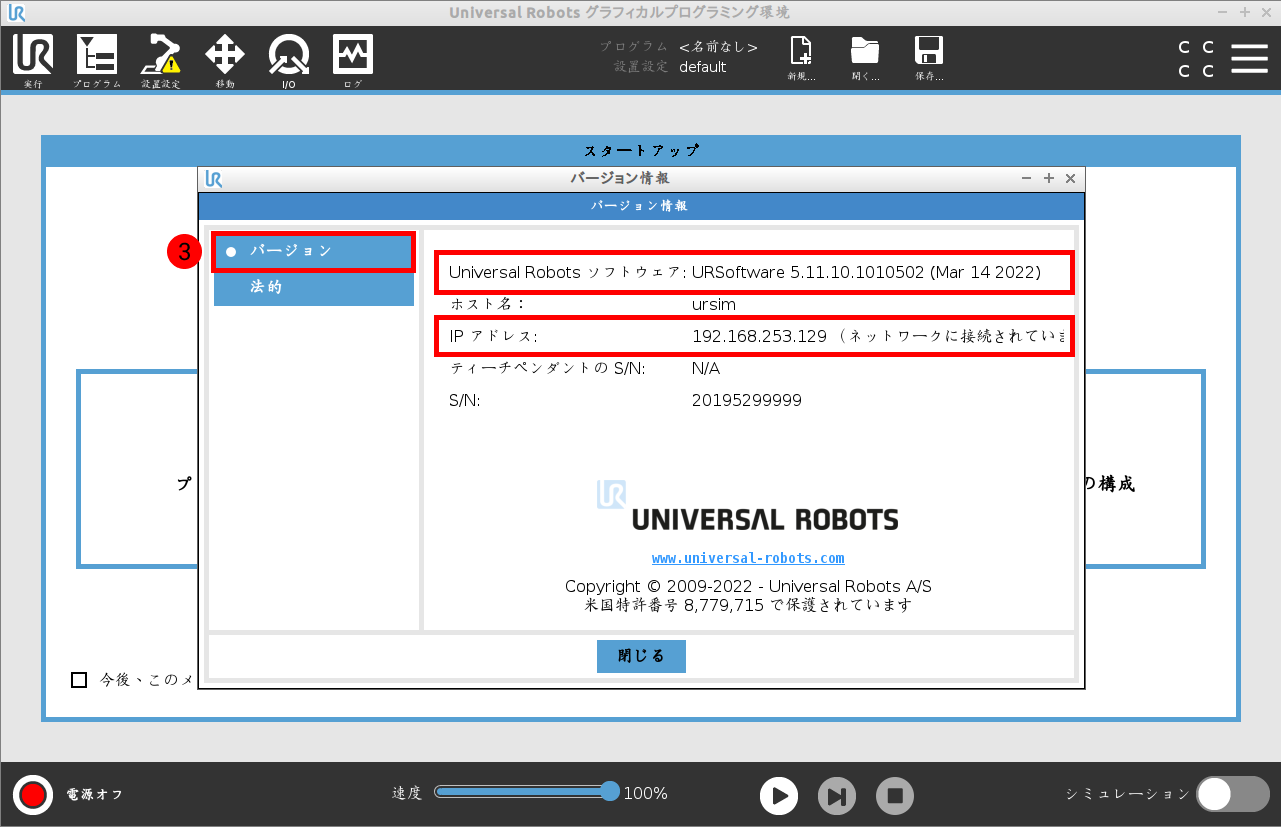
ティーチペンダントの右上隅のアイコンをクリックします。

-
ロボットの設定 を選択します。

-
をクリックします。
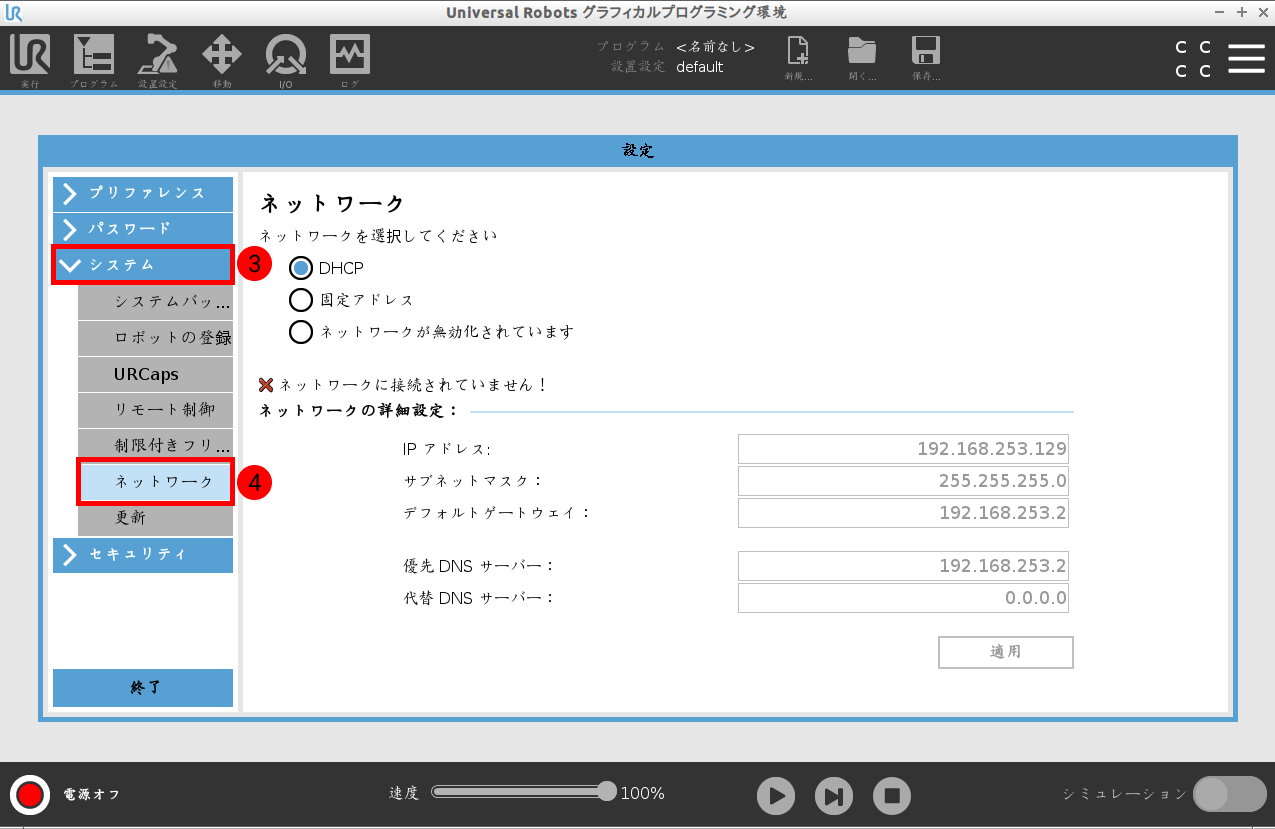
ロボットIPをIPCのIPを同じネットワークセグメントに設定します。設定後に 適用をクリックします。
リモート制御を有効化
-
ティーチペンダントの右上隅のアイコンをクリックします。
-
ロボットの設定 を選択します。
-
をクリックします。
-
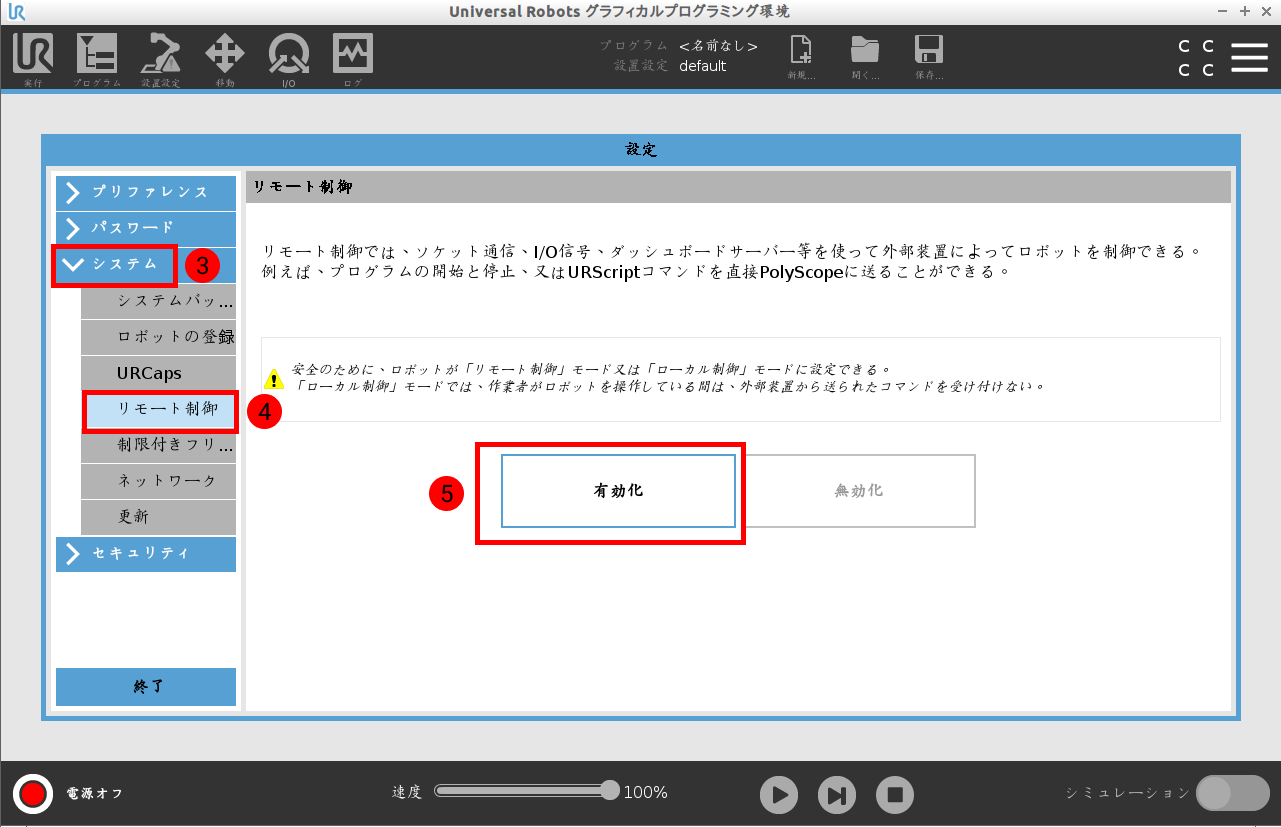
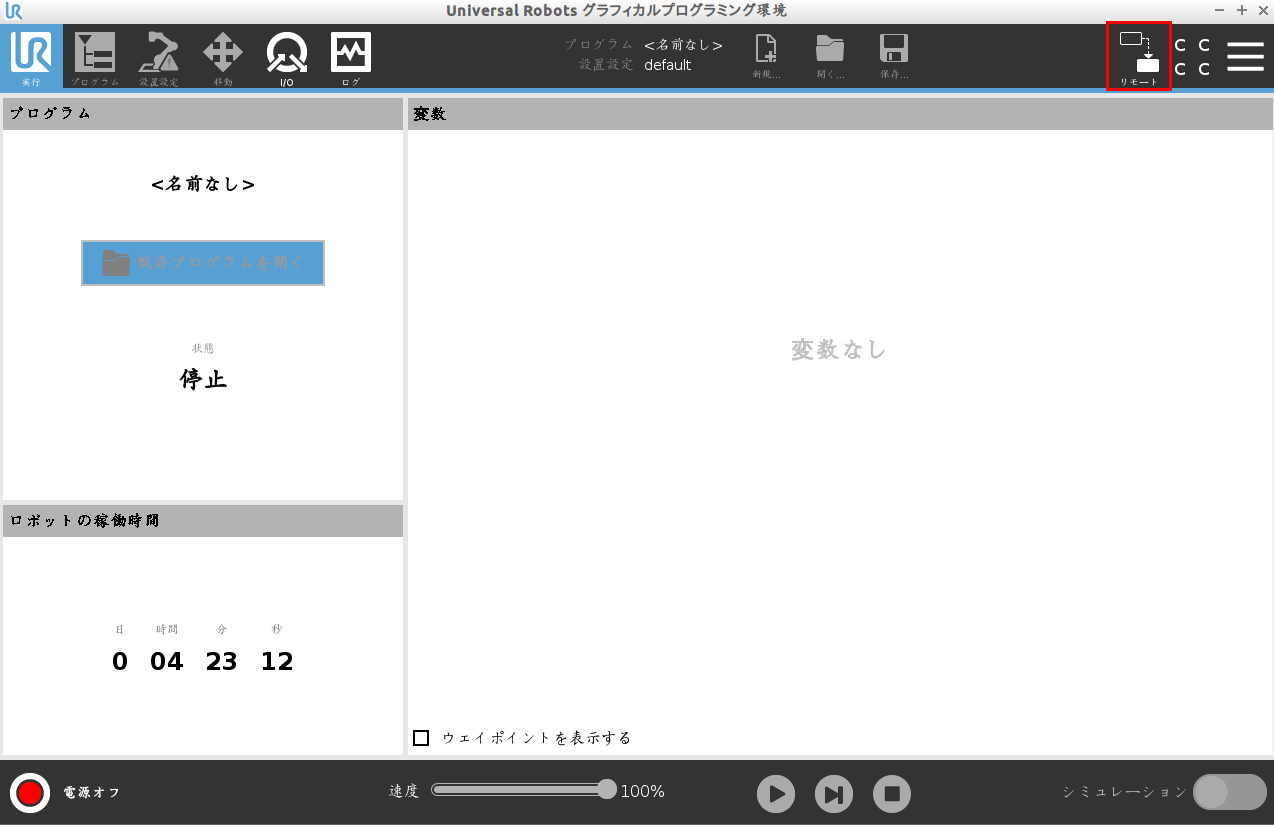
ティーチペンダントの右上隅に ローカル アイコンをクリックすると、 リモート制御 オプションが表示されます。

-
リモート制御 オプションをクリックすると、リモート制御モードが有効になります。
Mech-Centerの設定を確認してロボットに接続
詳細については、 ロボットの接続状態をテスト をご参照ください。