キャリブレーションの操作手順
本節では、標準インターフェース通信を用いたKawasakiロボットの自動キャリブレーションについて説明します。
| 開始する前に 標準インターフェースの通信設定 を参照してロボットプログラムの読み込みを完了しました。 |
キャリブレーションするためのプログラムを開く
-
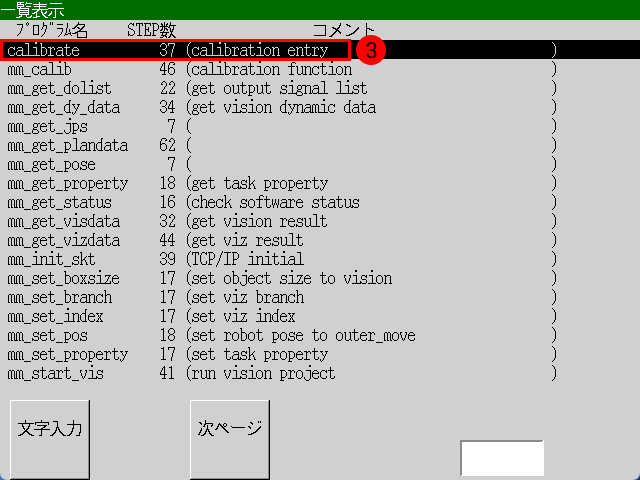
ティーチモードになっていて、プログラムウィンドウをクリックし、 calibrate を選択して、
登録を押します。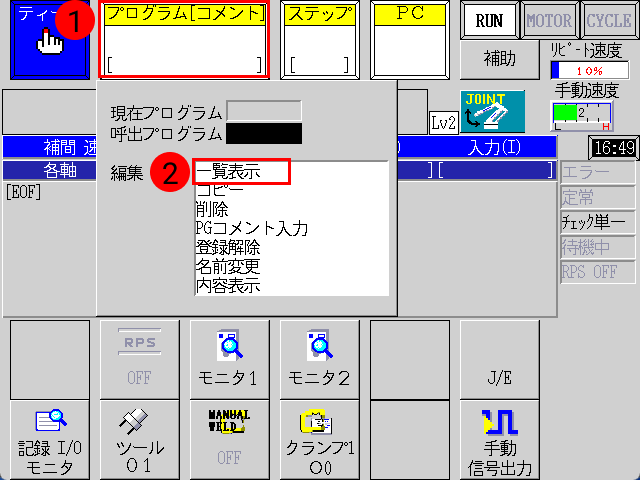
-
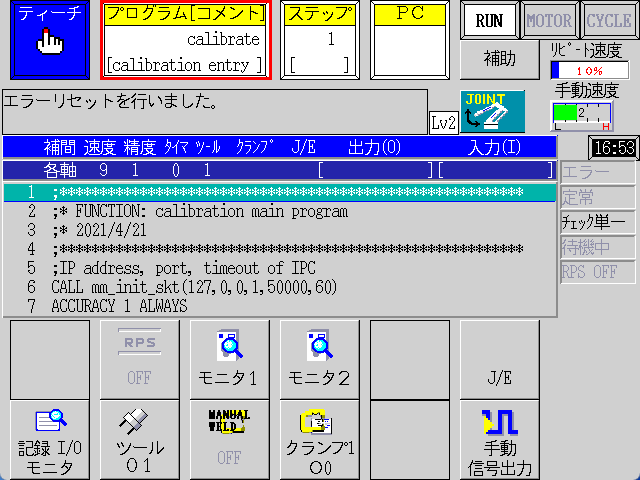
プログラムを選択した後、下図のような画面が表示されます。
キャリブレーションの初期位置を教示
-
まずはロボットを手動でキャリブレーションの初期位置を移動します。
-
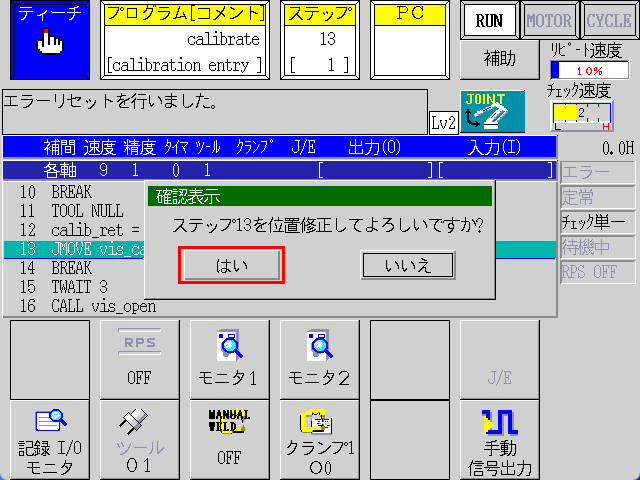
次に、ステップウインドウをクリックし、13を入力して
登録を押して確認します。 calibrate プログラムの13行目を選択します。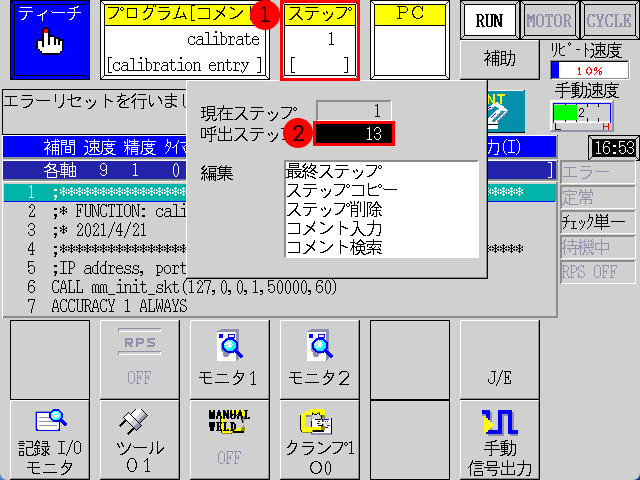
-
その後、ティーチペンダントの
Aおよび位置修正を同時に押します。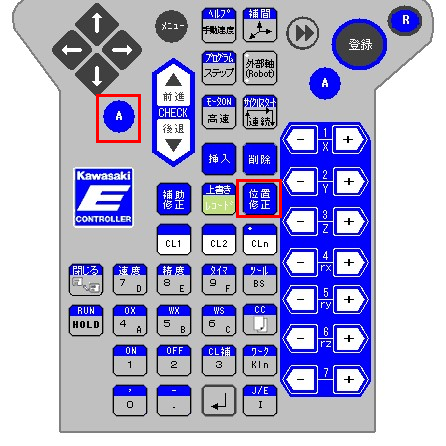
-
ポップアップウィンドウで はい をクリックして、最下層点の位置姿勢を位置変数 vis_calib_start に変更します。これは、今後の初期位置として直接使用できます。
キャリブレーションプログラムを実行
-
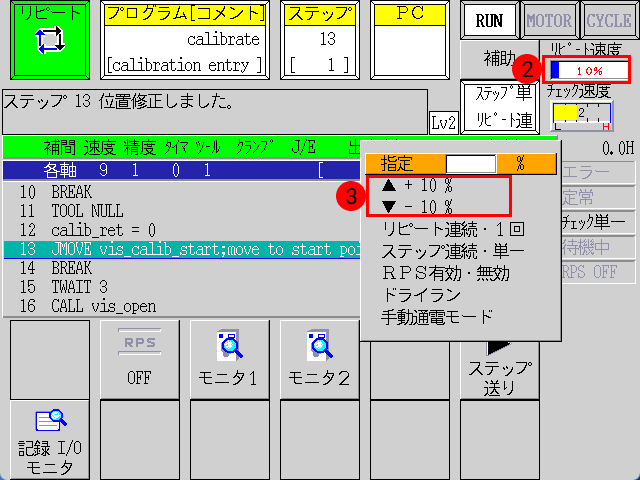
リピートモード に切り替えた後、実行モードを ステップ連続、リピート一回 に変更します。また、リピートの速度を10%に設定します。

-
次に、ステップウインドウをクリックし、1を入力して、
登録を押すと、プログラムは最初の行から実行します。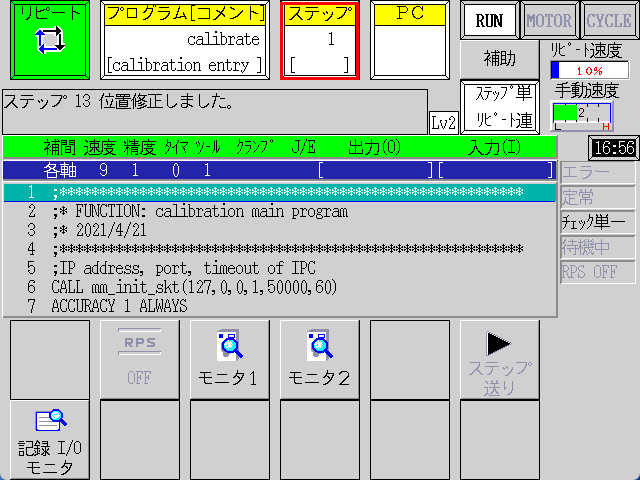
-
上記の設定が完了した後、
Aを押したまま MOTOR をクリックして MOTOR を点灯させます。Aを押したまま CYCLE をクリックして CYCLE を点灯させます。RUN が点灯していない場合は、Aを押したまま、一時停止/実行を押します。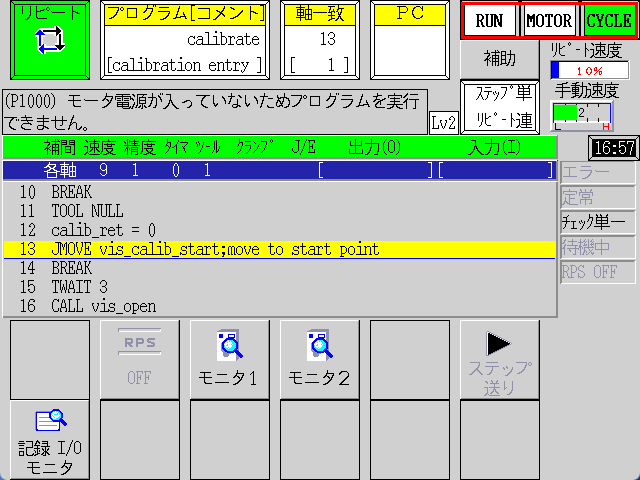
-
Mech-VisionのログバーのConsoleタブに、「キャリブレーションプロセスに入ります。Mech-Visionでキャリブレーションを開始してください」と表示されます。
Mech-Visionでキャリブレーションを実行
-
Mech-Visionを起動し、 カメラキャリブレーション(標準モード) をクリックするか、またはメニューバーで を順番にクリックしてキャリブレーションツールを起動します。
-
カメラの取り付け方式に応じて、ソフトウェアの指示に従って残りの操作を行います。
-
Eye to Handの場合、 自動キャリブレーション(Eye to Hand) をご参照ください。
-
Eye in Handの場合、 自動キャリブレーション(Eye in Hand) をご参照ください。
-
| ロボットが60秒以内に次の経路点に到達しない場合、Mech-Visionはタイムアウトエラーが発生します。この場合、ティーチペンダントでキャリブレーションプログラムを再度選択し、最初の行から実行し、Mech-Visionでキャリブレーションを再開する必要があります。 |