自動キャリブレーション
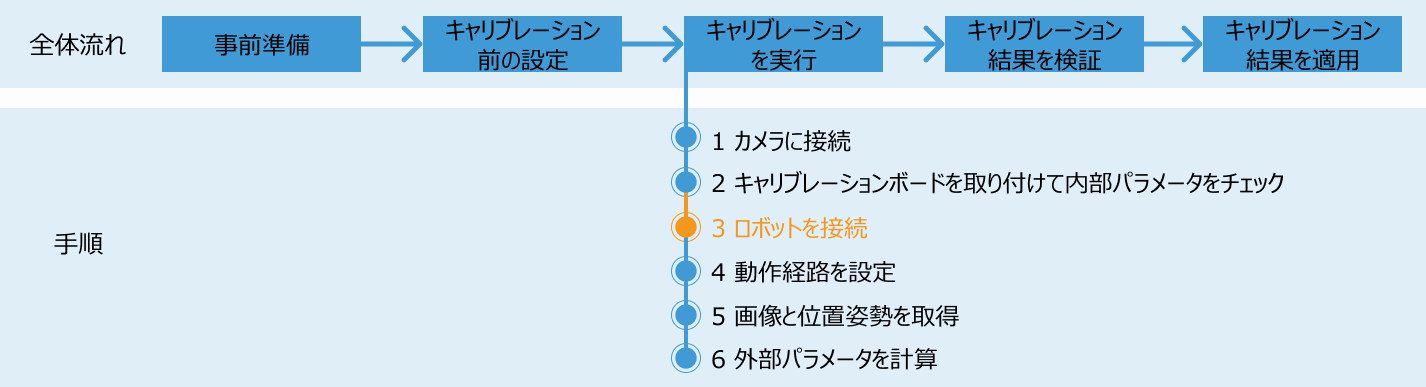
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
1. キャリブレーションプログラムの選択と変更
-
ティーチモードでは、プログラムウィンドウをクリックし、表示されるメニューから 一覧表示 を選択します。

-
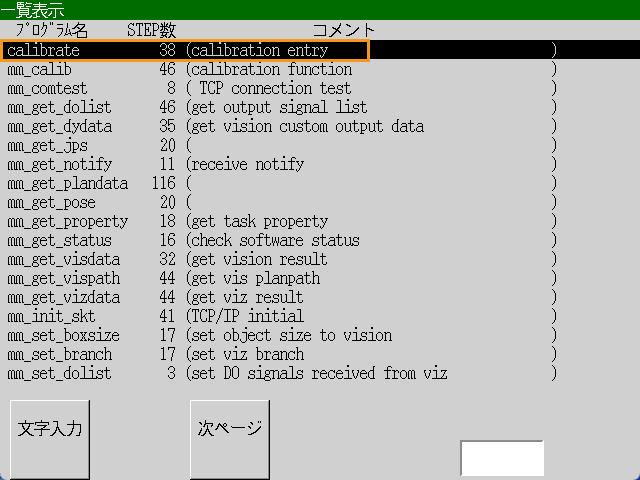
一覧表示で calibrate フォアグラウンドプログラムを選択し、ティーチペンダントの Enter を押して確認します。
フォアグラウンドプログラムが追加された後、下図のように示します。
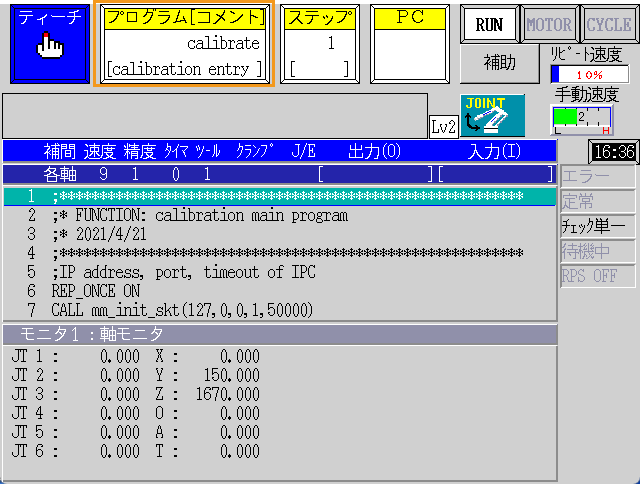
-
calibrateプログラムのmm_init_sktコマンドのパラメータを以下のように変更します。
-
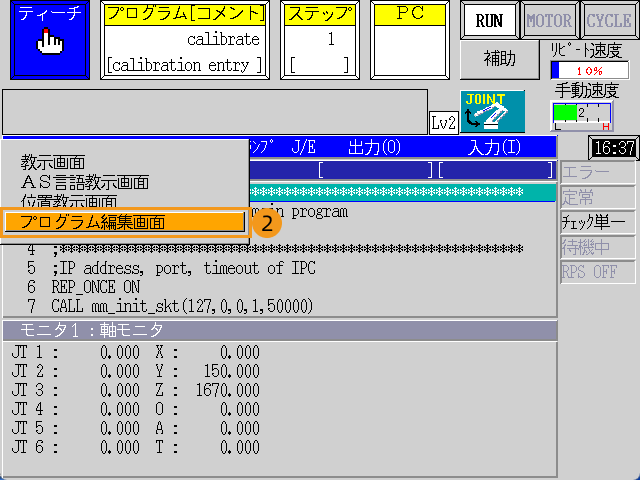
ティーチペンダントの J/E を押し、ポップアップメニューで プログラム編集画面 を選択し、Enter を押します。
-
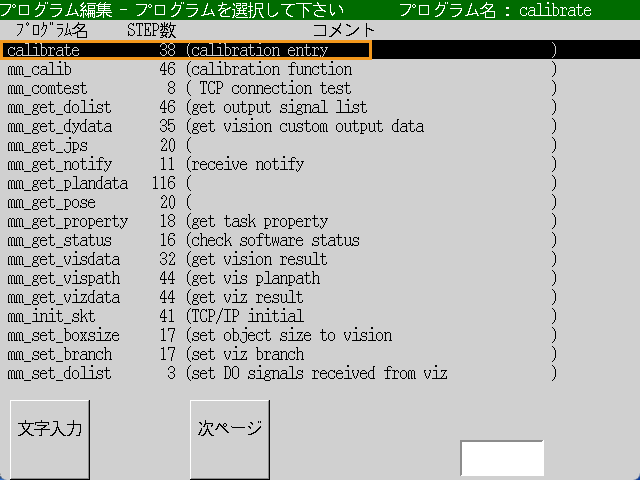
プログラム一覧から calibrate を選択し、Enter を押します。
-
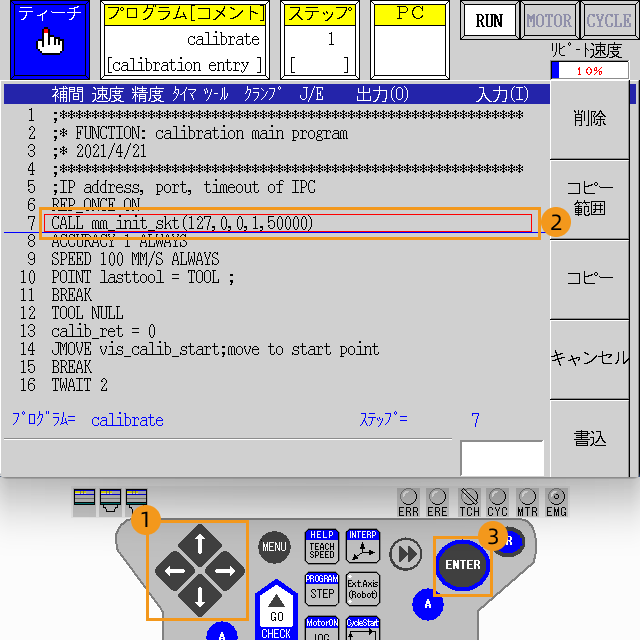
ティーチペンダントの矢印キーを使って、赤いチェックボックスをmm_init_sktのある行に移動させ、call mm_init_skt(127,0,0,1,50000) が選択されていることを確認し、 Enter を押して確認します。
-
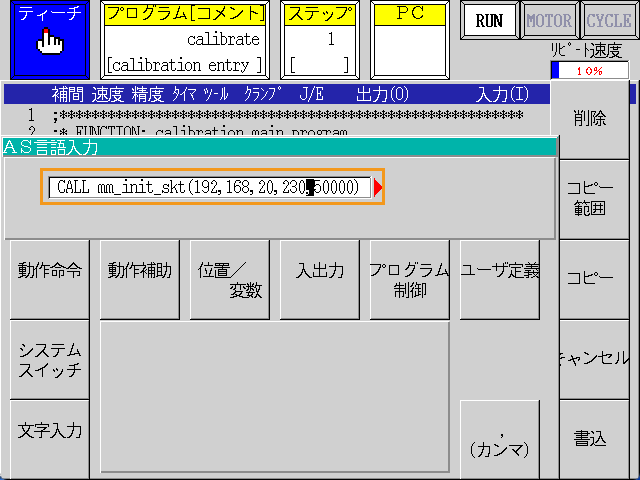
ティーチペンダントの方向キーを使用して、入力ボックスのカーソルを対応する位置に移動し、127,0,0,1 をIPCのIPアドレスに変更します。また、「50000」をMech-Visionで設定されたホストアドレスに変更します。変更後、Enter を押して確認し、R を押して終了します。
-
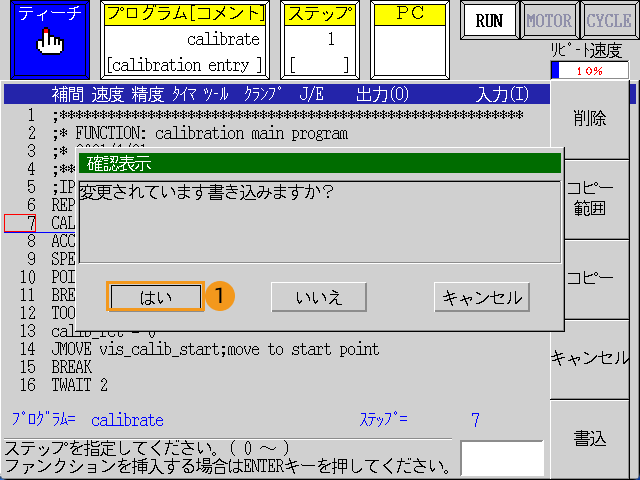
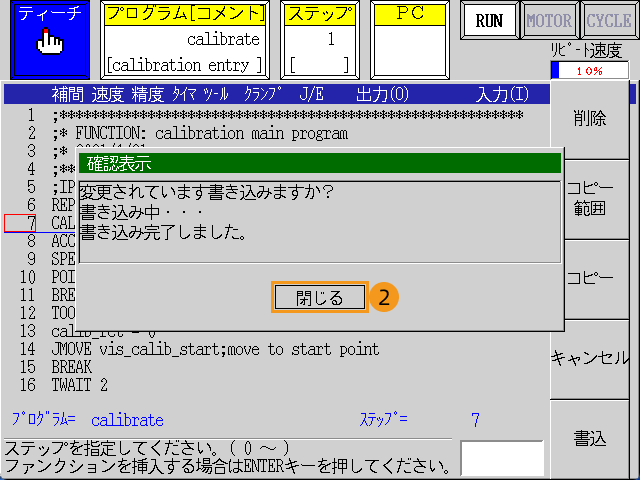
ポップアップウィンドウで、はい を選択し、次に 閉じる を選択します。
-
2.キャリブレーションの初期位置を設定
-
手動でロボットをキャリブレーションの初期位置に移動させます。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。
-
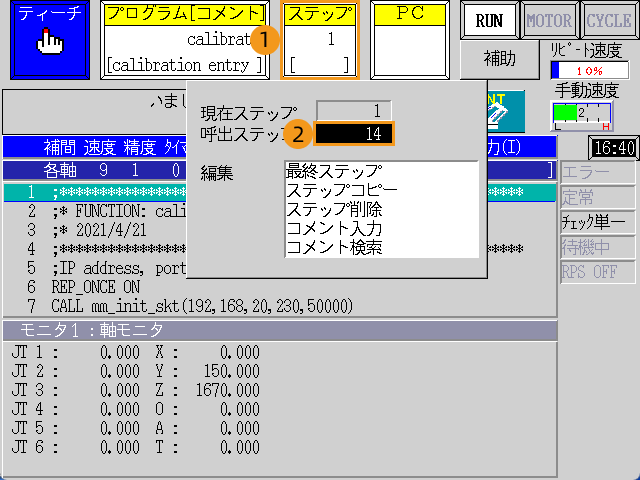
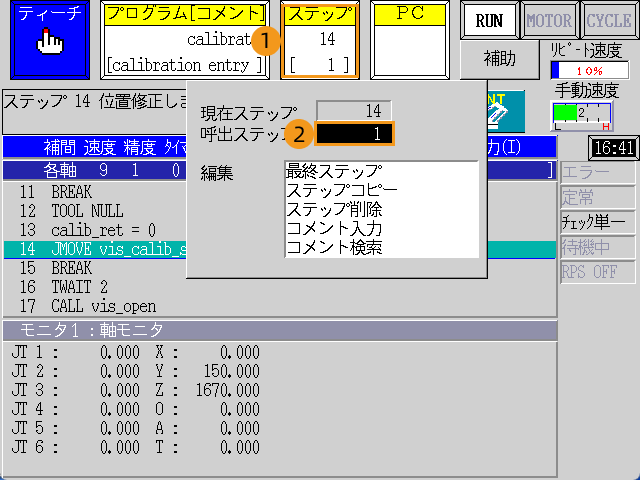
ステップ画面をクリックし、「JMOVE vis_calib_start;」のある行の番号(ここでは14を例として)を入力し、Enter を押すと、「JMOVE vis_calib_start;」のある行が選択されます。
-
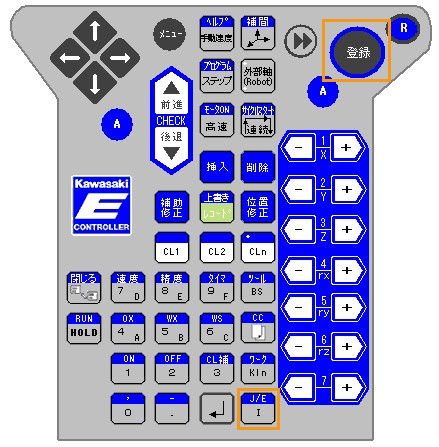
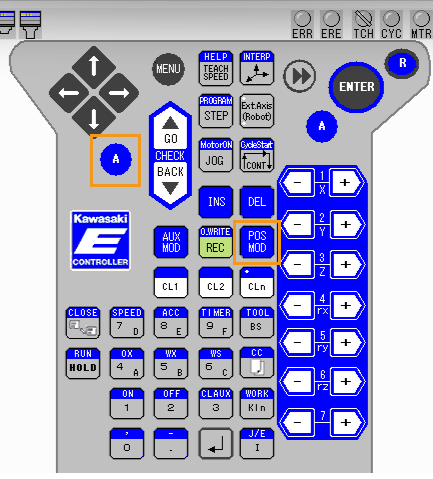
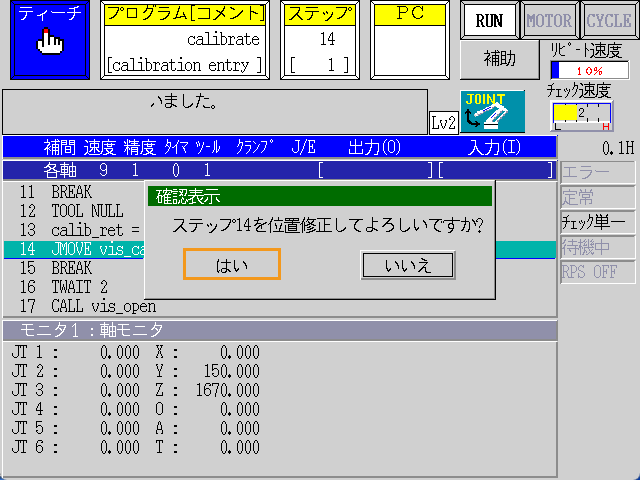
その後、ティーチペンダントの A と POS MOD を同時に押します。
-
表示される画面で はい をクリックすると、ロボットの現在の位置姿勢が位置姿勢変数 vis_calib_start に保存されます。それをキャリブレーションの初期位置として使用可能です。
3. キャリブレーションプログラムを実行
-
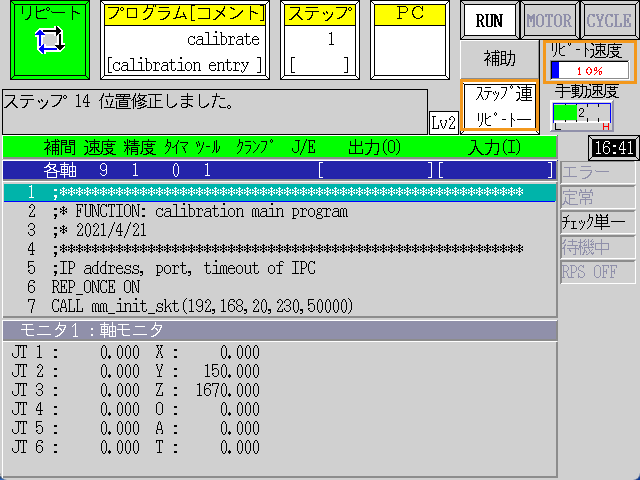
次に、ステップウインドウをクリックし、1 を入力して 登録 を押すと、プログラムは最初の行から実行されます。
-
コントローラの ティーチ/リピート スイッチを リピートモード に回して、ティーチペンダのスイッチを切ってリピートモードにします。

-
タッチパネルでプログラムの実行モードを ステップ連続、リピート一回 に設定し、タッチパネルで リピート速度 を 10 % に設定します。
-
ティーチペンダントの A を押しながら、タッチパネルで MOTOR をクリックして、MOTOR を点灯させます。ティーチペンダントの A を押しながら、タッチパネルで CYCLE をクリックして、CYCLE を点灯させます。この時、 RUN は点灯しなければ、A を押したままタッチパネルの RUN/HOLD を押します。
RUN、MOTOR 、CYCLE は全部点灯したら、プログラムが実行できるようになります。 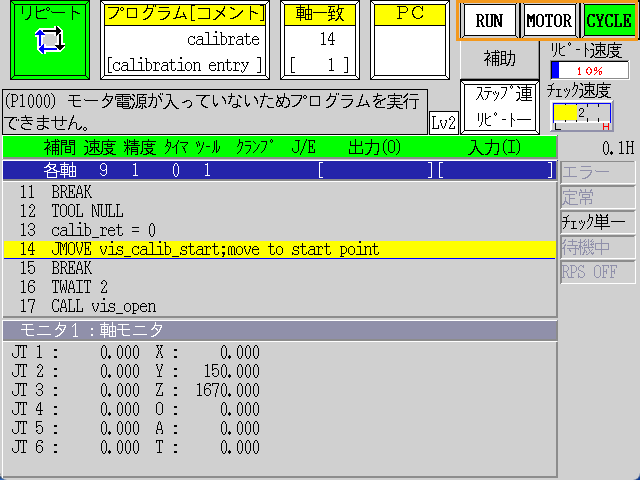
-
Mech-Visionの キャリブレーション 画面では、ロボットを接続 の下に「接続済み」の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、次へ をクリックします。
-
次に、キャリブレーションを実行 の4番目の手順(動作経路を設定)および残りの設定を実行します。以下の内容をご参照ください。