サンプルプログラム13:MM_S13_Vis_MoveInAdvance
プログラム概要
機能 |
Mech-Visionプロジェクトをトリガーした後、ロボットがカメラ撮影が完了した時点で移動でき、Mech-Visionプロジェクトの実行が終了するのを待機する必要はありません。このサンプルは、カメラがEIH方式で取り付けられている場合に適しています。 |
ファイル場所 |
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある |
必要なプロジェクト |
Mech-Visionプロジェクト(EIHカメラ取り付け方式) |
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
以下はMM_S13_Vis_MoveInAdvanceサンプルプログラムのコードと関連する説明です。
| このサンプルは、MM_S1_Vis_Basicサンプルに比べて、「撮影完了後に移動できる」機能(太字部分のコード)のみが追加されています。そのため、MM_S1_Vis_Basicサンプルと同じ部分のコードについては、以下で再度説明することはありません(詳細は MM_S1_Vis_Basicサンプルの説明 をご参照ください)。 |
DEF MM_S13_Vis_MoveInAdvance ( )
;---------------------------------------------------
; FUNCTION: trigger Mech-Vision project then move
; to wait position and get vision pose in EIH setup
; Mech-Mind, 2023-12-25
;---------------------------------------------------
;set current tool no. to 1
BAS(#TOOL,1)
;set current base no. to 0
BAS(#BASE,0)
;move to robot home position
PTP HOME Vel=100 % DEFAULT
;initialize communication parameters (initialization is required only once)
MM_Init_Socket("XML_Kuka_MMIND",873,871,60)
;move to image-capturing position
LIN camera_capture Vel=1 m/s CPDAT1 Tool[1] Base[0]
;trigger NO.1 Mech-Vision project
MM_Start_Vis(1,0,1,init_jps)
;move to wait position for picking
LIN pick_wait_point CONT Vel=1 m/s CPDAT6 Tool[1] Base[0]
;get vision result from NO.1 Mech-Vision project
MM_Get_VisData(1,pos_num,status)
;check whether vision result has been got from Mech-Vision successfully
IF status<> 1100 THEN
;add error handling logic here according to different error codes
;e.g.: status=1003 means no point cloud in ROI
;e.g.: status=1002 means no vision result
halt
ENDIF
;save first vision point data to local variables
MM_Get_Pose(1,Xpick_point,label,toolid)
;calculate pick approach point based on pick point
tool_offset={X 0,Y 0,Z -100,A 0,B 0,C 0}
Xpick_app=Xpick_point:tool_offset
;move to intermediate waypoint of picking
PTP pick_waypoint CONT Vel=50 % PDAT1 Tool[1] Base[0]
;move to approach waypoint of picking
LIN pick_app Vel=1 m/s CPDAT2 Tool[1] Base[0]
;move to picking waypoint
LIN pick_point Vel=0.3 m/s CPDAT3 Tool[1] Base[0]
;add object grasping logic here, such as "$OUT[1]=TRUE"
halt
;move to departure waypoint of picking
LIN pick_app Vel=1 m/s CPDAT2 Tool[1] Base[0]
;move to intermediate waypoint of placing
PTP drop_waypoint CONT Vel=100 % PDAT2 Tool[1] Base[0]
;move to approach waypoint of placing
LIN drop_app Vel=1 m/s CPDAT4 Tool[1] Base[0]
;move to placing waypoint
LIN drop Vel=0.3 m/s CPDAT5 Tool[1] Base[0]
;add object releasing logic here, such as "$OUT[1]=FALSE"
halt
;move to departure waypoint of placing
LIN drop_app Vel=1 m/s CPDAT4 Tool[1] Base[0]
;move back to robot home position
PTP HOME Vel=100 % DEFAULT
END上記のサンプルプログラムの処理流れは、下図の通りです。
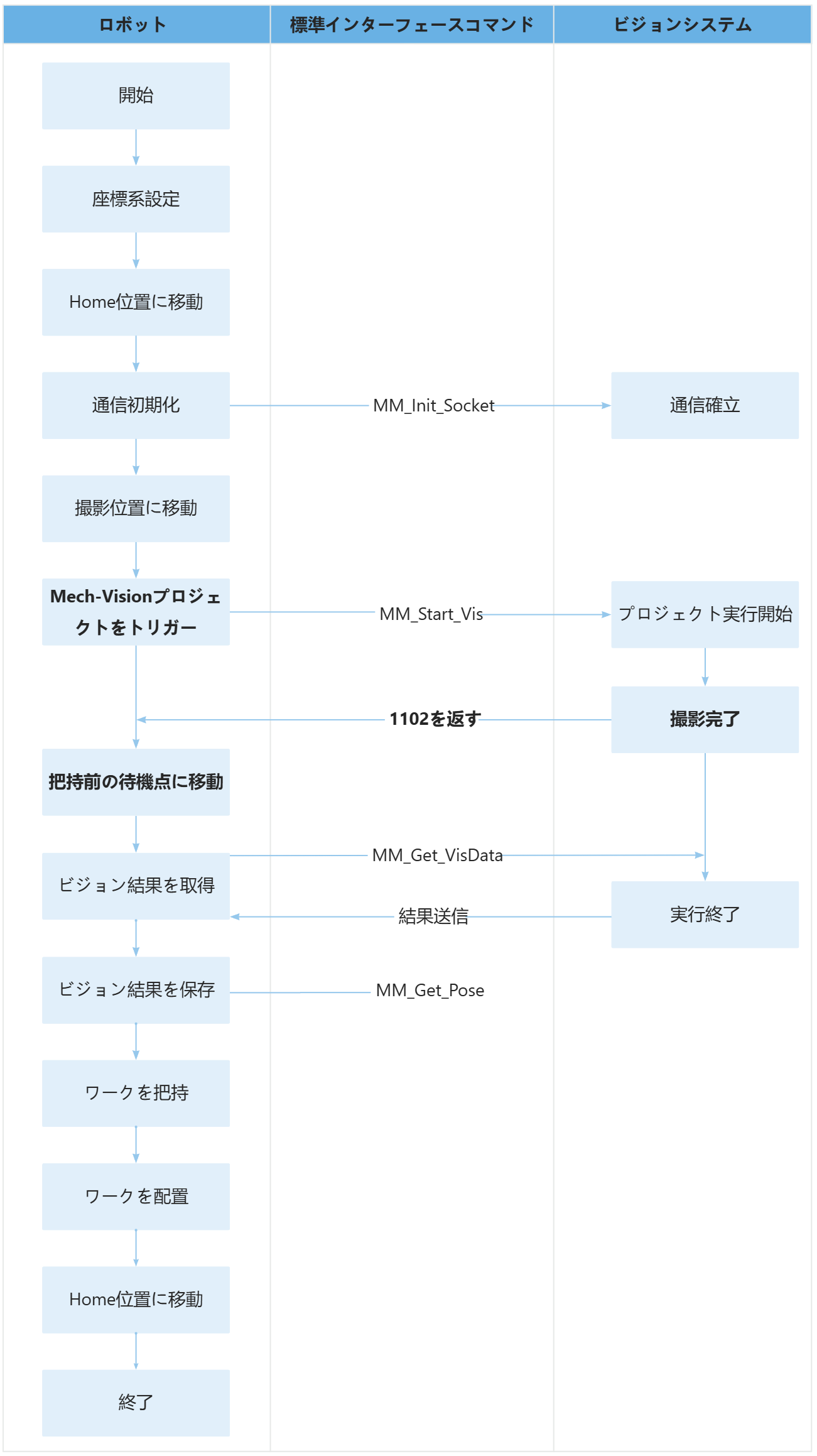
下表は、「撮影完了後に移動できる」機能のコードとその説明です。コマンド名のリンクをクリックすることで、その詳細を確認できます。
| 処理流れ | コートと説明 | ||||
|---|---|---|---|---|---|
ロボットが撮影完了後に移動できる |
EIHシーンでは、Mech-Visionプロジェクトの実行が終了するのを待たずに、カメラの撮影完了後にロボットが移動できるようにするために、Mech-Visionソフトウェア内で を選択し、撮影完了後、「1102:トリガー成功」を返す にチェックを入れます。これにより、ロボットはMech-Visionプロジェクトをトリガーし、「1102:トリガー成功」を受信した後、移動を開始できるようになり、サイクルタイムを短縮できます。 下図のように設定していない場合、Mech-Visionプロジェクトが正常に実行されると、ビジョンシステムは直ちに「1102」ステータスコードをロボットに返します。このとき、ロボットは撮影が完了したかどうか判断できないため、移動することはできません。したがって、ロボットはMech-Visionプロジェクトが終了するのを待つ必要があります。

上記のコードは、ロボットが撮影後に把持の待機点に移動できることを意味します。これにより、Mech-Visionプロジェクトの実行とロボットの移動を並行して行うことができ、サイクルタイムを短縮することができます。
|