通信設定
以下では、MELFA ロボットへの標準インターフェースプログラムのインポート方法と、Mech-Mind ビジョンシステムとの通信設定手順について説明します。
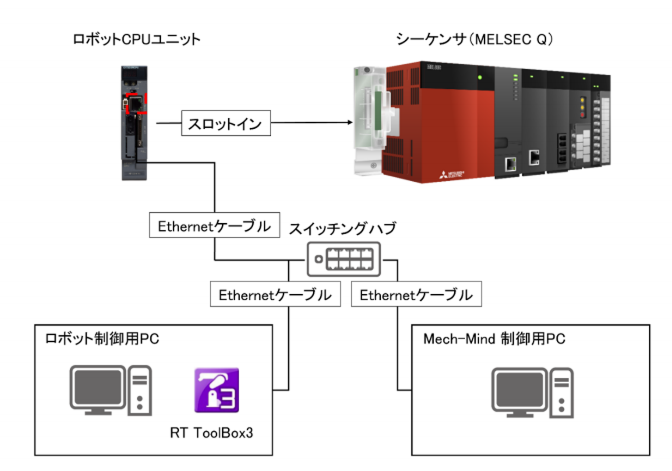
ハードウェア接続を構築
MELFA ロボットのコントローラは、次の 2 種類に分類されます。
-
D タイプ:直接制御型。コントローラがロボットを直接制御します。コントローラ名の末尾に
-Dが付きます。例として CR800-D シリーズなどがあります。 -
Q/R タイプ:間接制御型。MELSEC Q または MELSEC iQ-R シリーズのシーケンサを介して複数台のロボットを制御します。コントローラ名の末尾に
-Qまたは-Rが付きます。例として CR800-Q、CR860-Q、CR800-R、CR860-R シリーズなどがあります。
これら 2 種類のコントローラでは、必要となるハードウェア接続が異なります。実際に使用しているコントローラに応じて、以下の図および表を参照して、対応するハードウェアを接続してください。
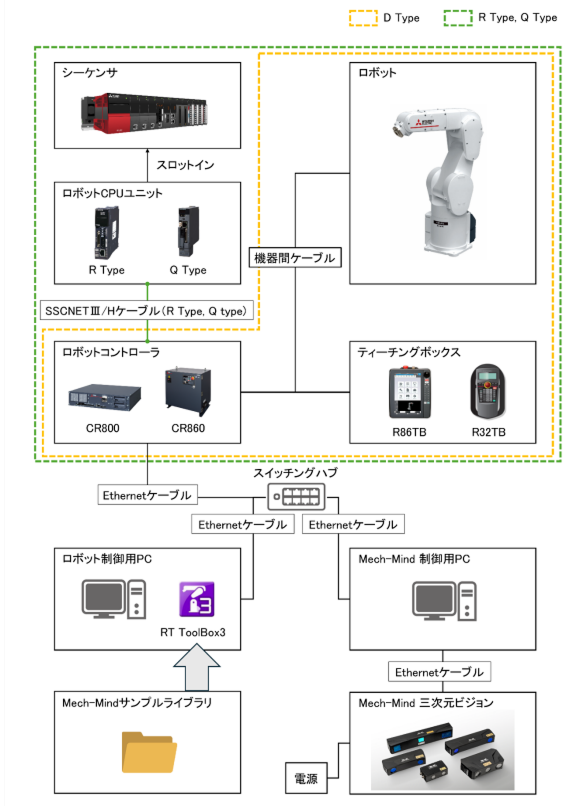
| コントローラ | 接続説明図 | |
|---|---|---|
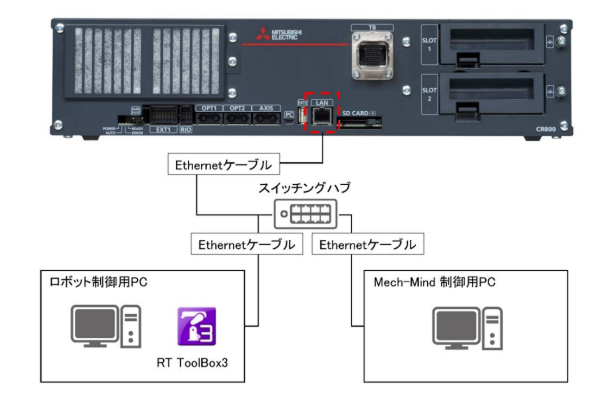
D タイプ |
CR800-D |
|
CR860-D |
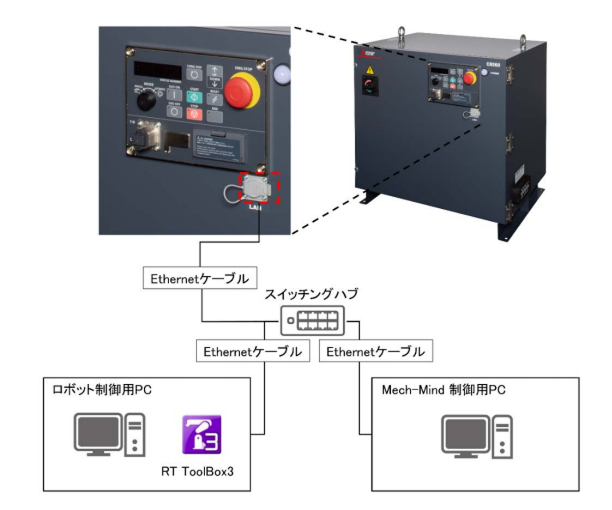
|
|
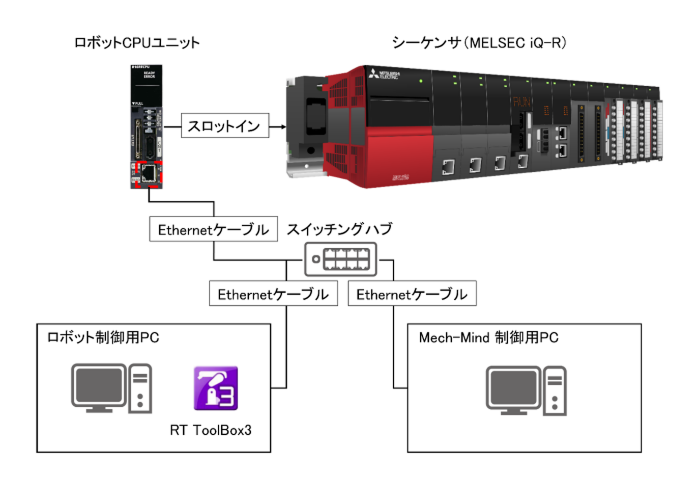
Q/R タイプ |
CR800-Q、CR860-Q |
|
CR800-R、CR860-R |
|
|
下表は、上図に示した一部ハードウェアの型式および説明です。
|
本文に記載されている型番およびバージョンは、動作確認に使用したものです。その他の型番やバージョンについても、本文を参考に操作をお試しください。問題が発生した場合は、Mech-Mindのテクニカルサポートまでお問い合わせください。 |
| ハードウェア | 項目 | 対応機種 | 備考 |
|---|---|---|---|
ロボット |
ロボット本体 |
RV-FR シリーズ |
|
RH-FRH シリーズ |
|||
RV-CR シリーズ |
|||
RH-CRH シリーズ |
|||
コントローラ |
CR800-D、CR860-D CR800-Q、CR860-Q CR800-R、CR860-R |
バージョン:Ver.E1 |
|
CPU |
R16RTCPU(MELSEC iQ-R シリーズに対応)、Q172DSRCPU(MELSEC Q シリーズに対応) |
||
ティーチングボックス |
R86TB / R32TB |
バージョン:Ver.1.9 |
|
シーケンサ |
CPU |
R00CPU、R01CPU、R02CPU、R04CPU、R08CPU R16CPU、R32CPU、R120CPU R08SFCPU-SET、R16SFCPU-SET R32SFCPU-SET、R120SFCPU-SET |
MELSEC iQ-R シリーズに適用可能 |
Q03UD(E/V)CPU Q04UD(H/EH/V)CPU Q06UD(H/EH/V)CPU Q10UD(H/EH)CPU Q13UD(H/EH/V)CPU Q20UD(H/EH)CPU Q26UD(H/EH/V)CPU Q50UDEHCPU Q100UDEHCPU |
MELSEC Q シリーズに適用可能 |
||
ベース |
R33B(3 スロット) R35B(5 スロット) R38B(8 スロット) R312B(12 スロット) |
MELSEC iQ-R シリーズに適用可能 |
|
Q35DB(5 スロット) Q38DB(8 スロット) Q312DB(12 スロット) |
MELSEC Q シリーズに適用可能 |
||
電源 |
R61P、R62P、R63P、R64P、R69P |
MELSEC iQ-R シリーズに適用可能 |
|
Q61P、Q62P、Q63P、Q64PN |
MELSEC Q シリーズに適用可能 |
||
スイッチングハブ |
1000BASE-T |
||
Ethernet ケーブル |
CAT5e 以上 |
||
Mech-Mind |
ソフトウェア |
Mech-Vision & Mech-Viz 2.1.0、Mech-Eye 2.4.0 |
|
産業用 3D カメラ |
Mech-Eye 全般 |
| ビジョンシステムのハードウェア設置については こちら をご参照ください。 |
シーケンサの通信パラメータを設定
|
-
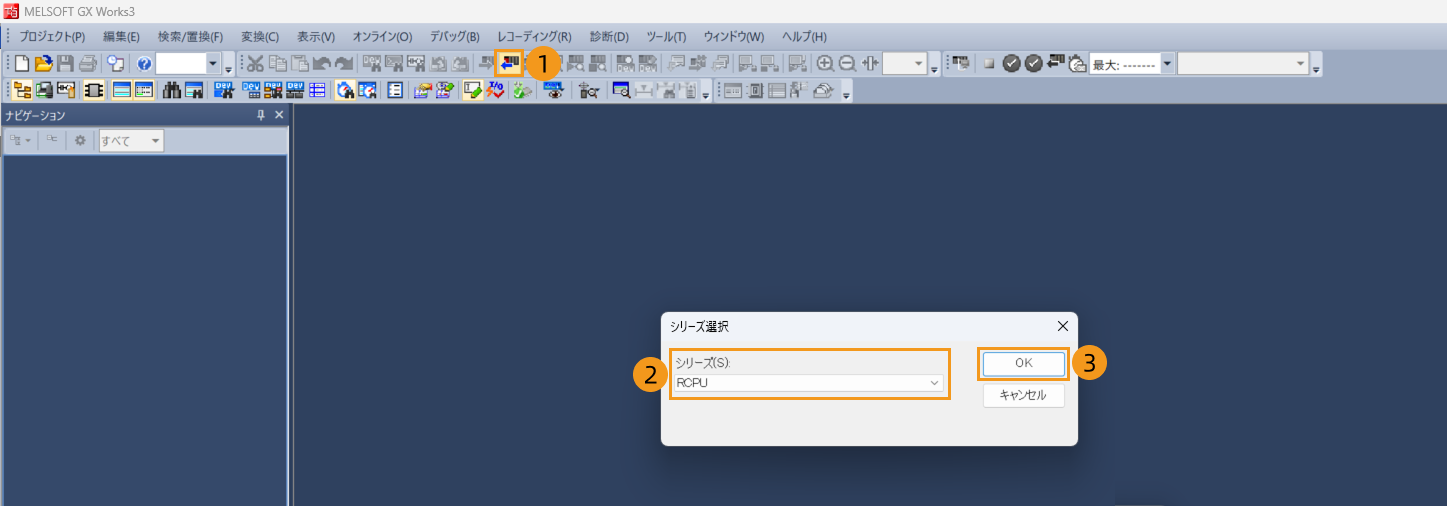
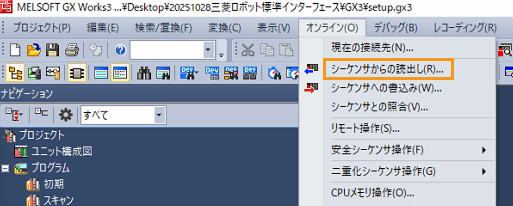
GX Works3 のメニューバーで シーケンサからの読出し をクリックします。ポップアップウィンドウで使用するシーケンサの CPU シリーズを選択します(本文では MELSEC iQ-R を例とします)。OK をクリックします。
-
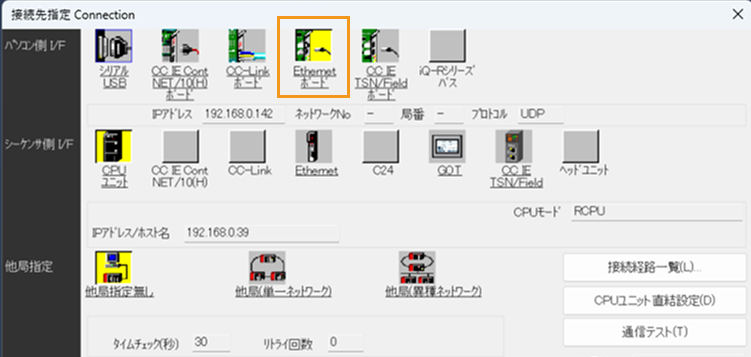
接続先指定 Connection 画面で、Ethernetボード をダブルクリックします。
-
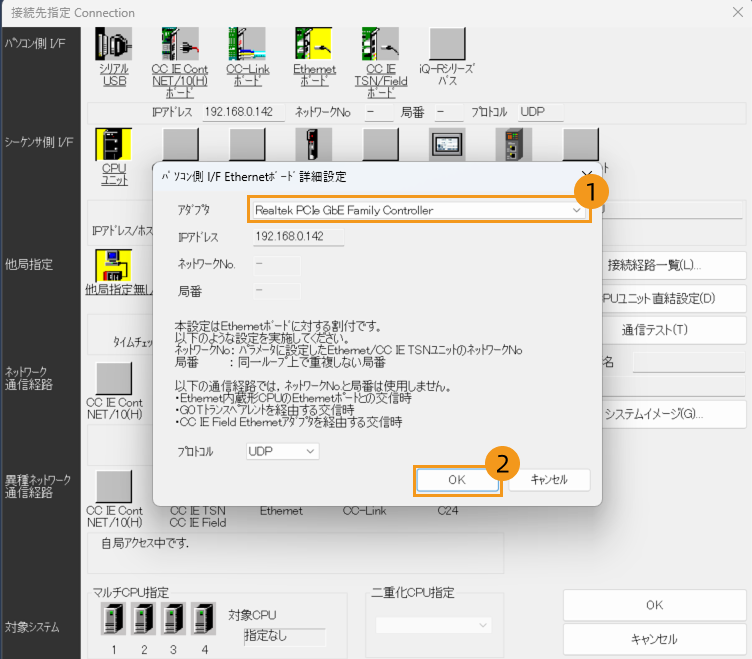
ポップアップウィンドウで、GX Works3 が動作している PC とシーケンサの通信に使用する Ethernet アダプタを選択します(本文では Realtek PCI GbE Family Controller を例とします)。OK をクリックします。
-
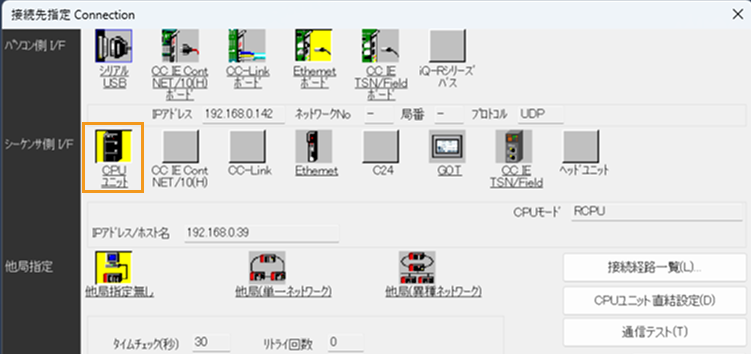
接続先指定 Connection 画面に戻り、CPU ユニット をダブルクリックします。
-
ポップアップウィンドウで、実際の状況に応じて接続方式を選択し、OK をクリックします。

-
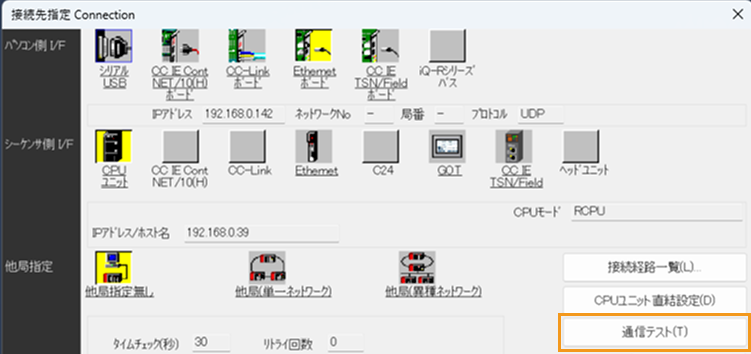
接続先指定 Connection 画面に戻り、通信テスト をクリックします。
-
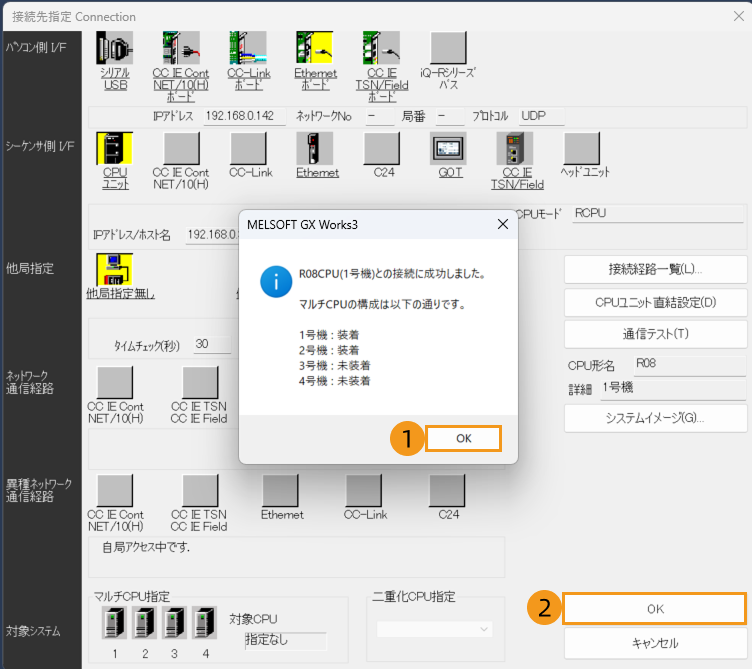
下図のような画面が表示されれば、GX Works3 とシーケンサが正常に通信できています。その後、OK をクリックしてウィンドウを閉じます。通信できない場合は、シーケンサと PC の接続状態や IP アドレス設定などを確認してください。
-
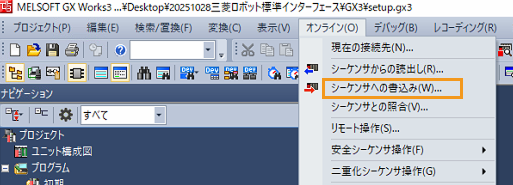
メニューバーから をクリックします。
-
ポップアップウィンドウで、 をクリックします。
-
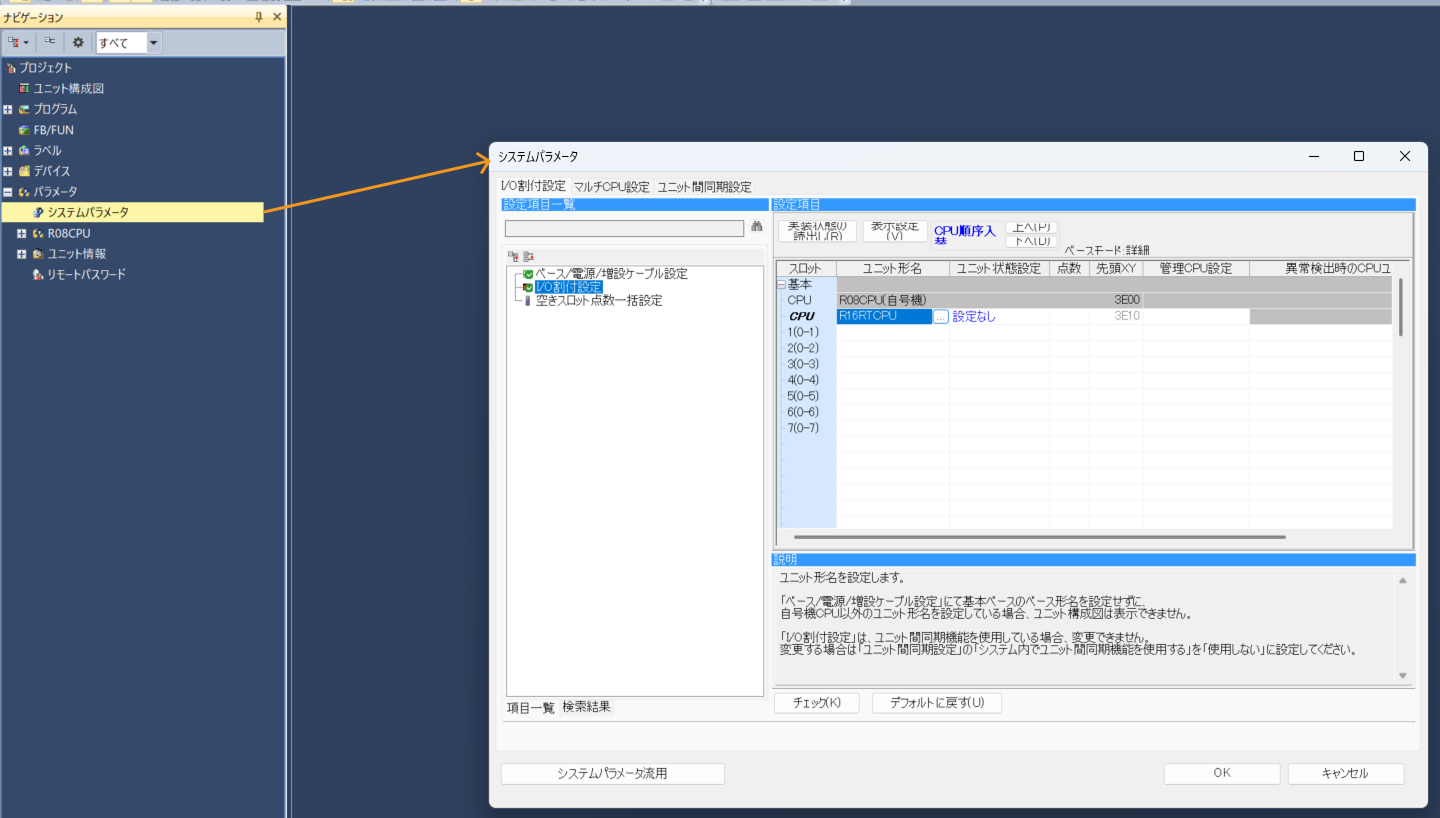
左側のナビゲーションバーで システムパラメータ をクリックすると、以下のウィンドウが表示されます。
-
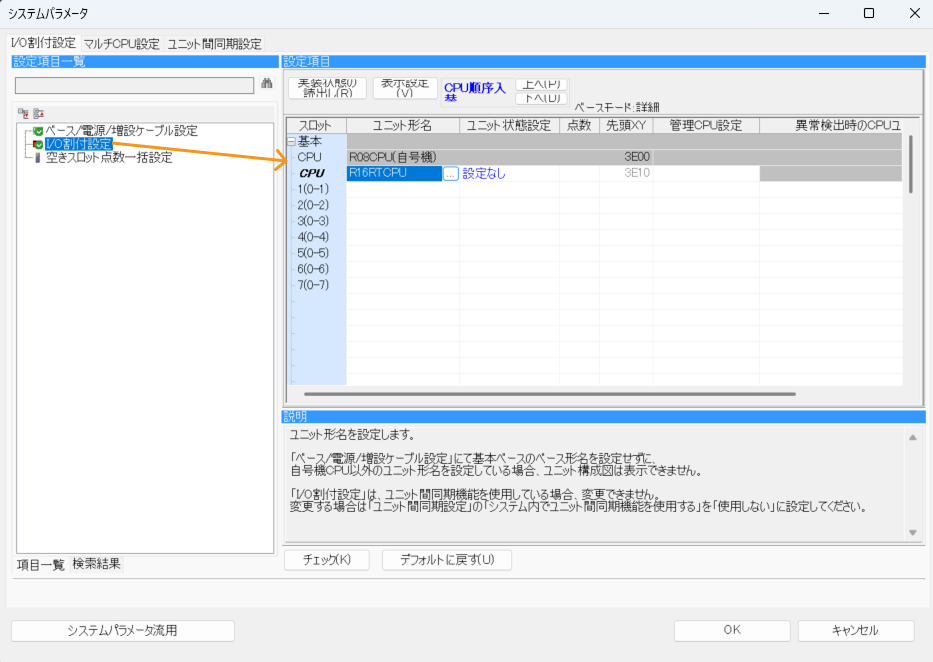
I/O割付設定 をクリックし、シーケンサの CPU が割付済みであることを確認します。未割付の場合は割付を行います。
-
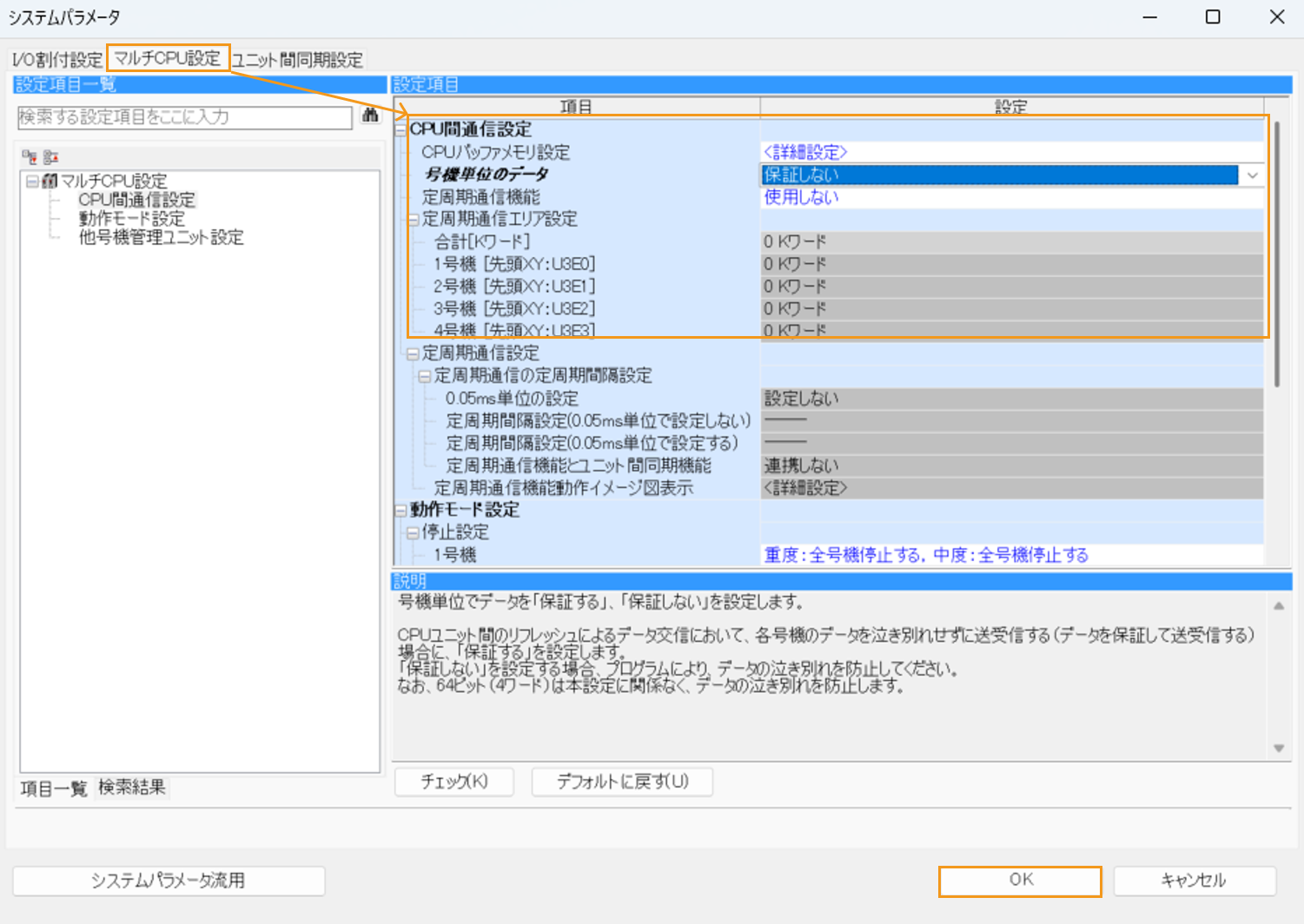
マルチCPU設定 をクリックし、ロボット CPU が割付済みであることを確認します。未割付の場合は割付を行います。最後に OK をクリックしてウィンドウを閉じます。
-
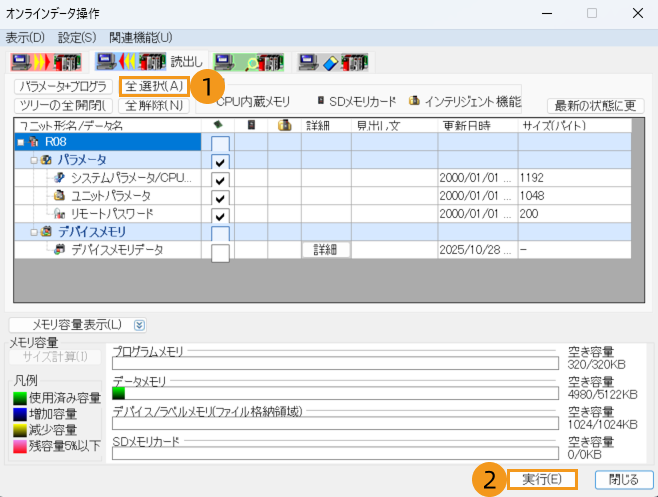
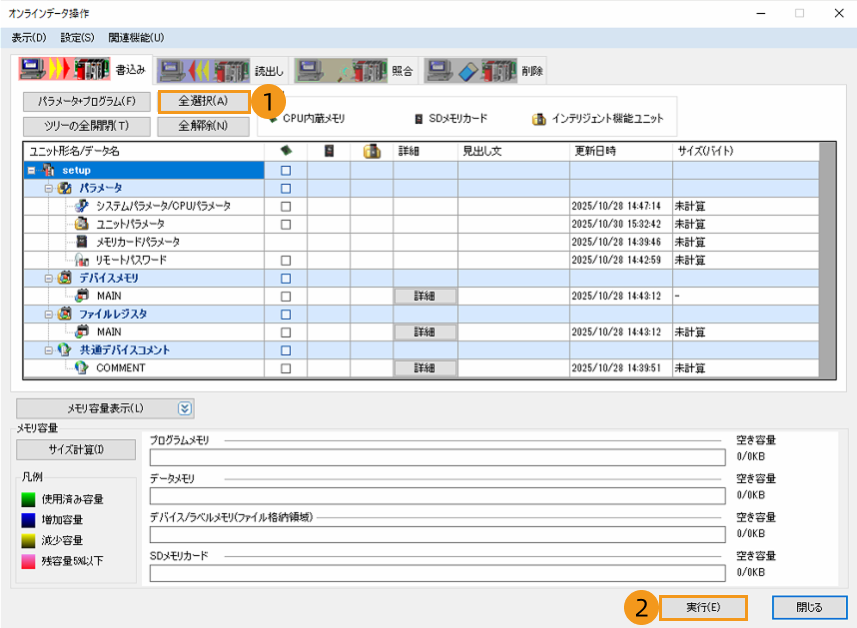
メニューバーから をクリックします。
-
ポップアップウィンドウで、 をクリックします。
-
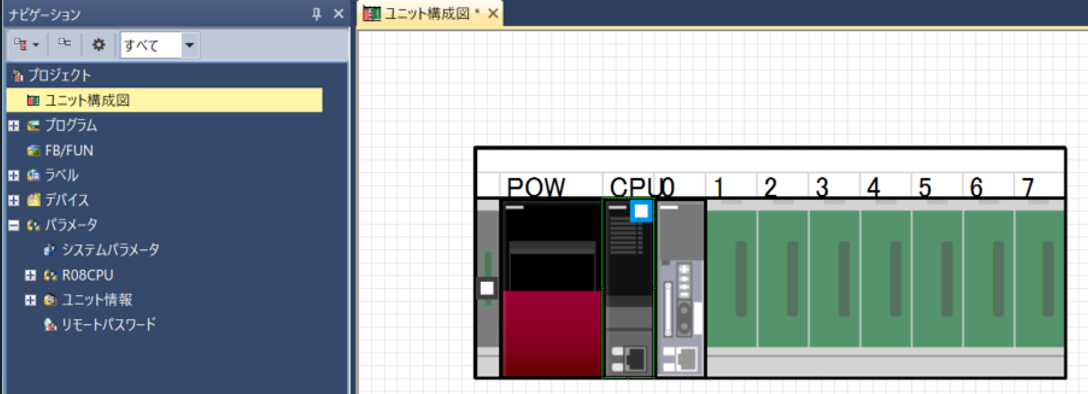
上記設定内容をシーケンサに書き込むと、CPU の構成が下図のように表示されます。実際の CPU と表示が一致しない場合は、右側のリストから対応する CPU を選択して追加してください。
ロボット実機を接続
-
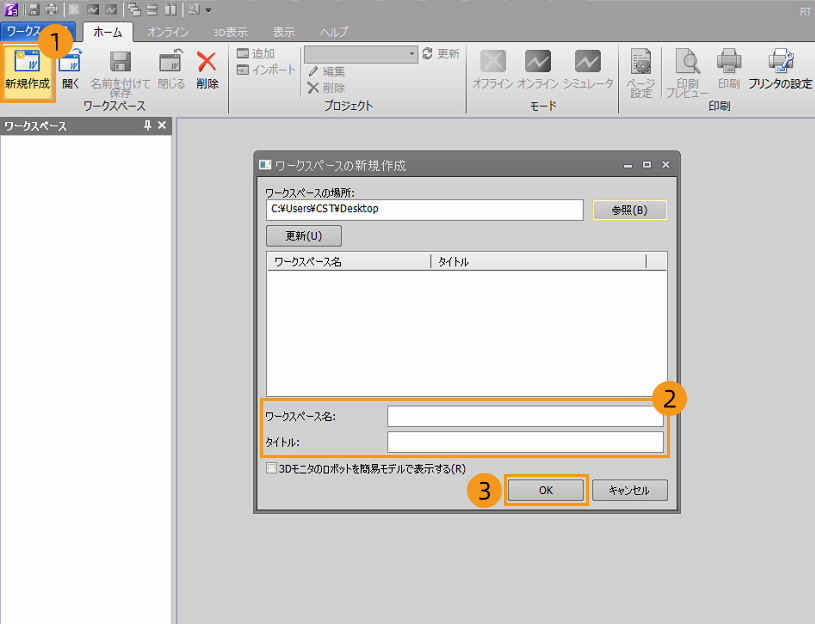
RT ToolBox3 ソフトウェアを起動し、新規作成 をクリックします。ポップアップウィンドウでワークスペース名などを設定し、OK をクリックします。下図のウィンドウが表示されたら、次へ をクリックします。
-
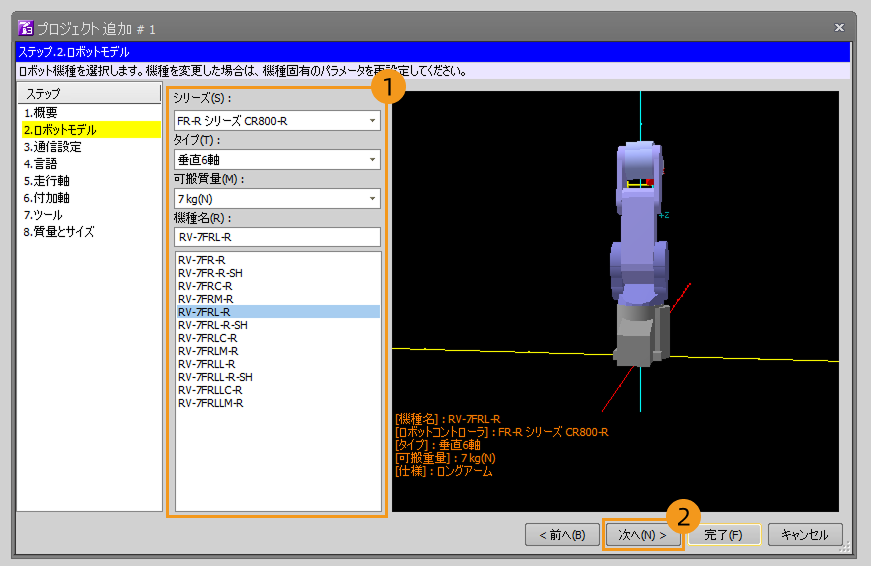
使用するロボットのシリーズ、タイプ、可搬質量、機種名を選択し、次へ をクリックします。
-
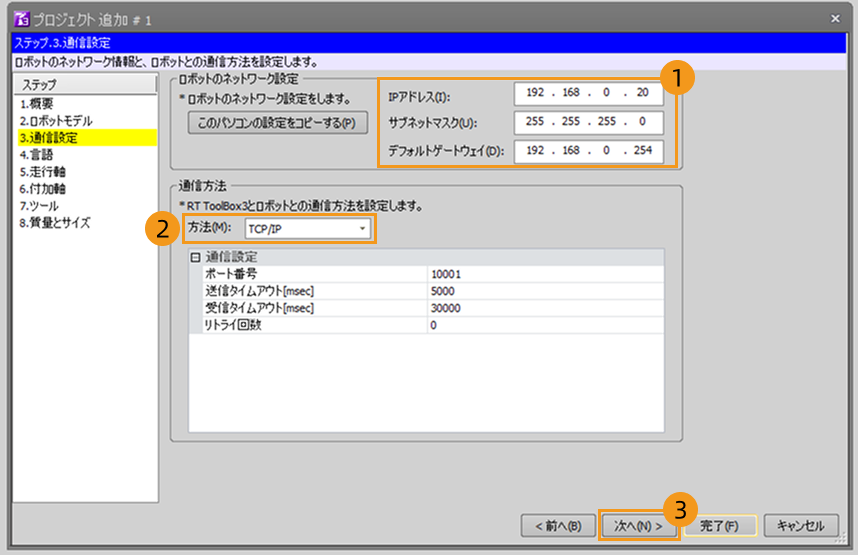
ロボットの IP アドレスを設定し、「通信方法」で TCP/IP を選択し、次へ をクリックします。
-
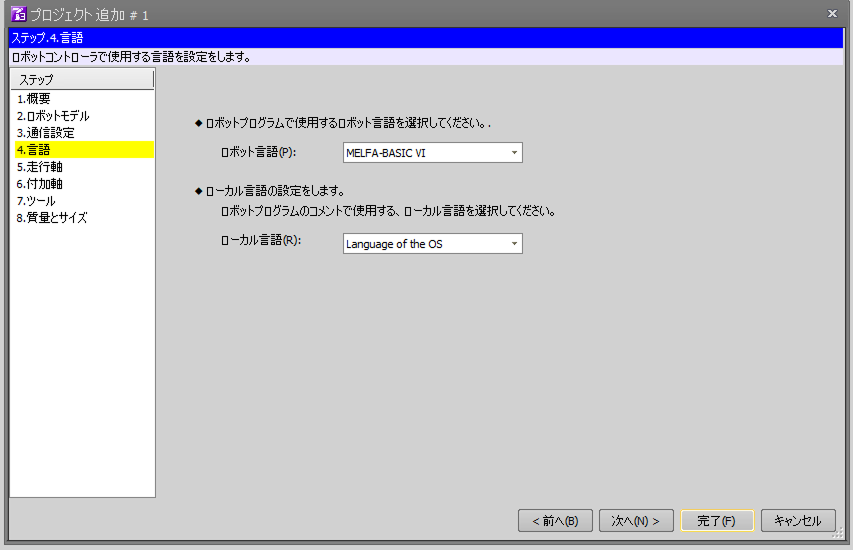
下図のウィンドウで、既定の設定をそのまま使用し、次へ をクリックします。
-
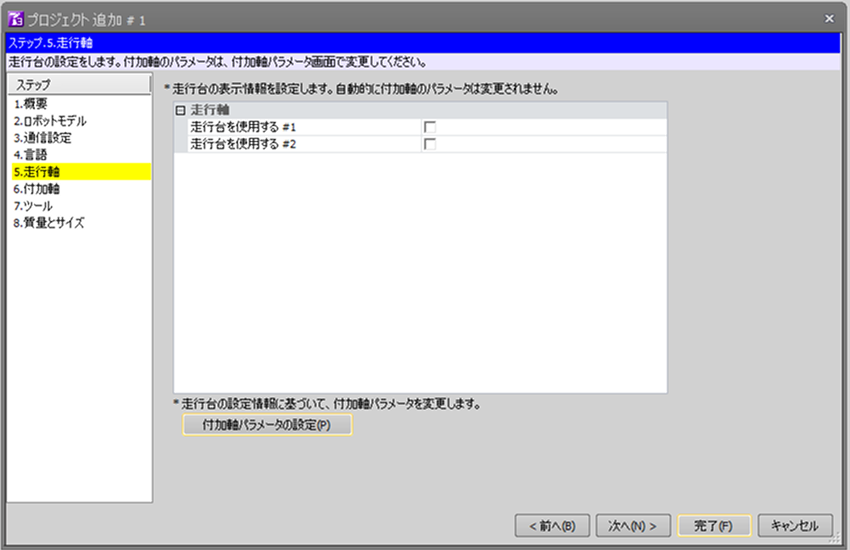
走行軸を使用する場合は該当するオプションを選択します。使用しない場合は設定不要です。次へ をクリックします。
-
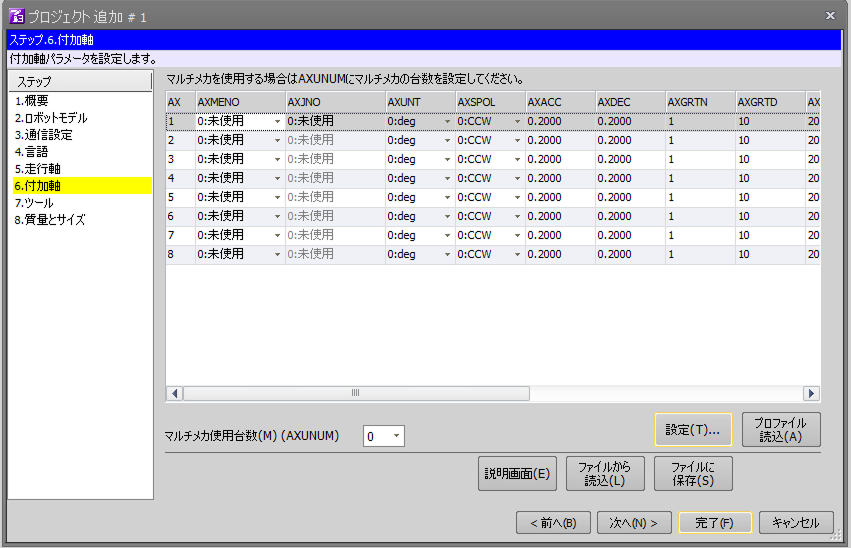
付加軸がある場合は関連パラメータを設定します。付加軸がない場合は設定不要です。次へ をクリックします。
-
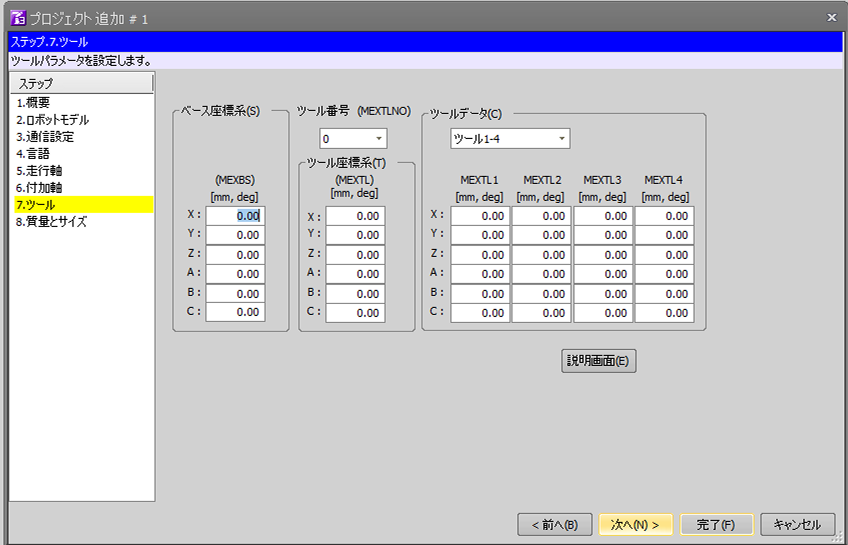
ツールがある場合は関連パラメータを設定します。ツールがない場合は設定不要です。次へ をクリックします。
-
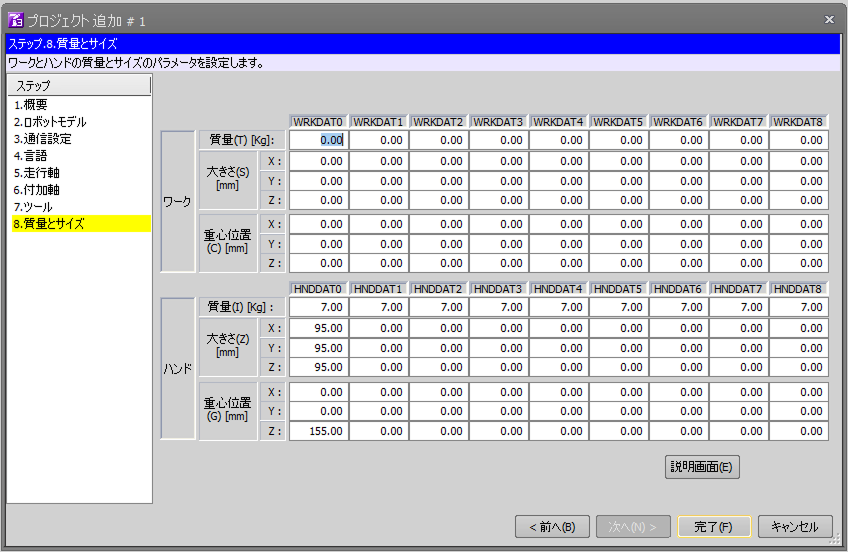
実際の状況に応じて、ワークおよびハンドに関するパラメータを設定し、完了 をクリックします。
-
下図のウィンドウが表示されたら、オンライン をクリックします。
-
左側に オンライン が表示されれば、ロボット実機への接続は正常に完了しています。
標準インターフェースプログラムファイルをインポート
-
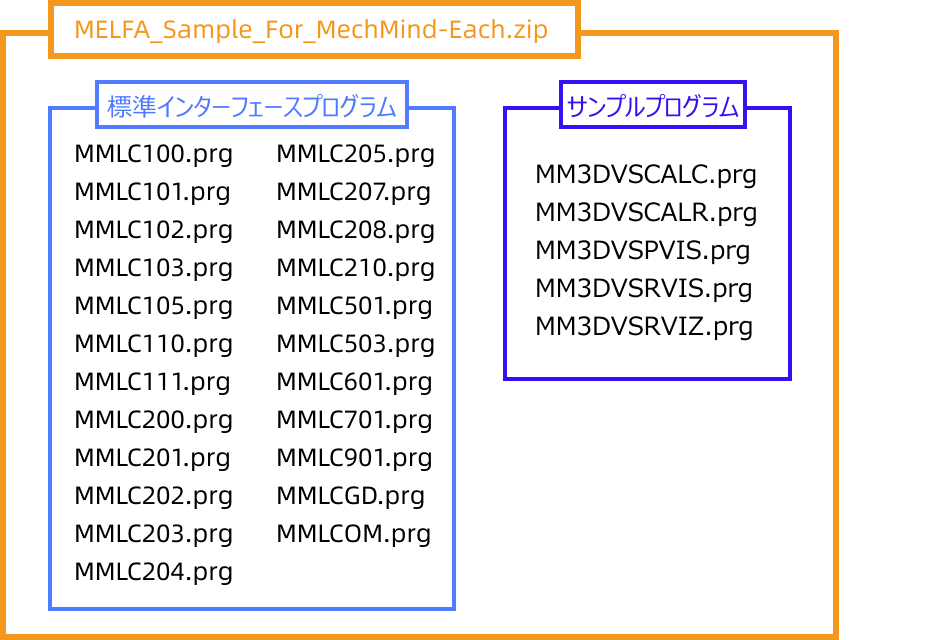
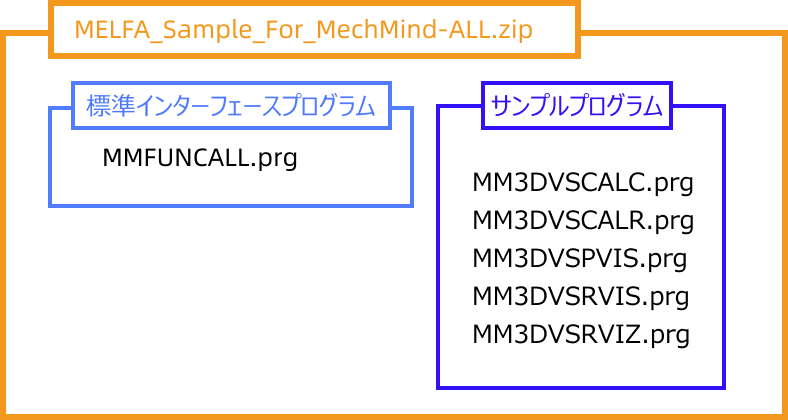
標準インターフェースプログラムファイルをダウンロードし、解凍します。以下の 2 種類があり、用途に応じていずれかを使用できます。
フォルダ 説明 機能ごとにプログラムが分割されており、必要なファイルだけを選択してインポートできます。
すべての機能を 1 つのプログラムに統合しており、1 つのファイルをインポートするだけで全機能が使用できます。
-
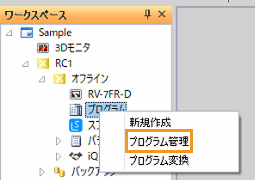
左側の ワークスペース で を順にクリックし、プログラム を右クリックして プログラム管理 を選択します。
-
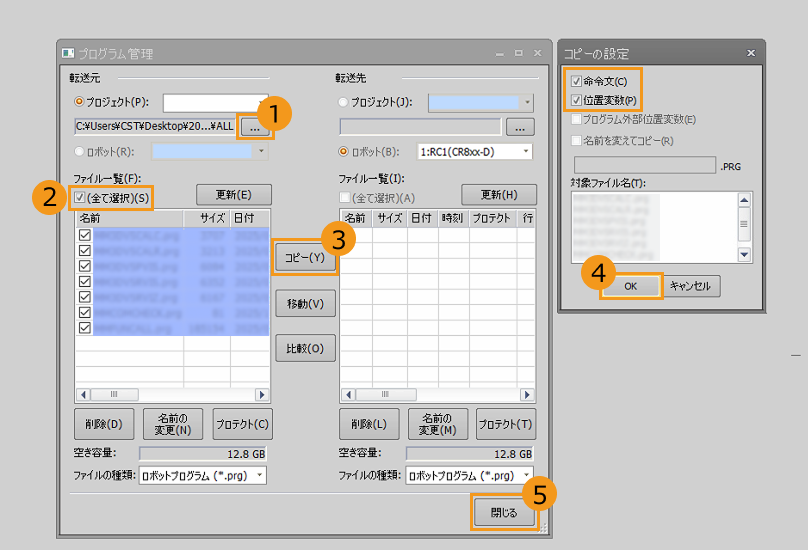
ポップアップウィンドウで以下の操作を行います。
-
... をクリックします。
-
表示されたウィンドウで、解凍したフォルダを選択して OK をクリックします。
-
全選択 にチェックを入れます。
-
コピー をクリックします。
-
ポップアップウィンドウで、命令文 と 位置変数 にチェックを入れ、OK をクリックします。右側のファイル一覧にコピーされたファイル名が表示されることを確認し、閉じる をクリックします。
-
-
左側の ワークスペース に、インポートされた標準インターフェースプログラムファイルが プログラム に表示されます。これで標準インターフェースプログラムファイルのインポートは完了です。
ロボット通信パラメータを設定
-
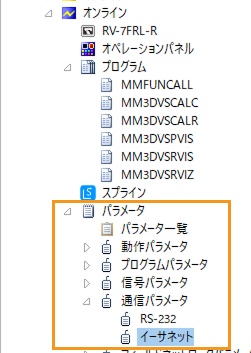
左側の ワークスペース で を順にクリックし、イーサーネット をダブルクリックします。
-
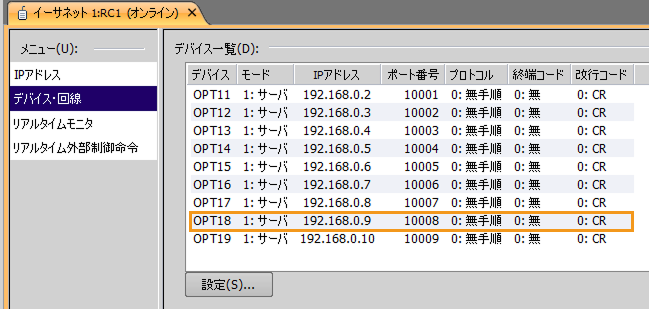
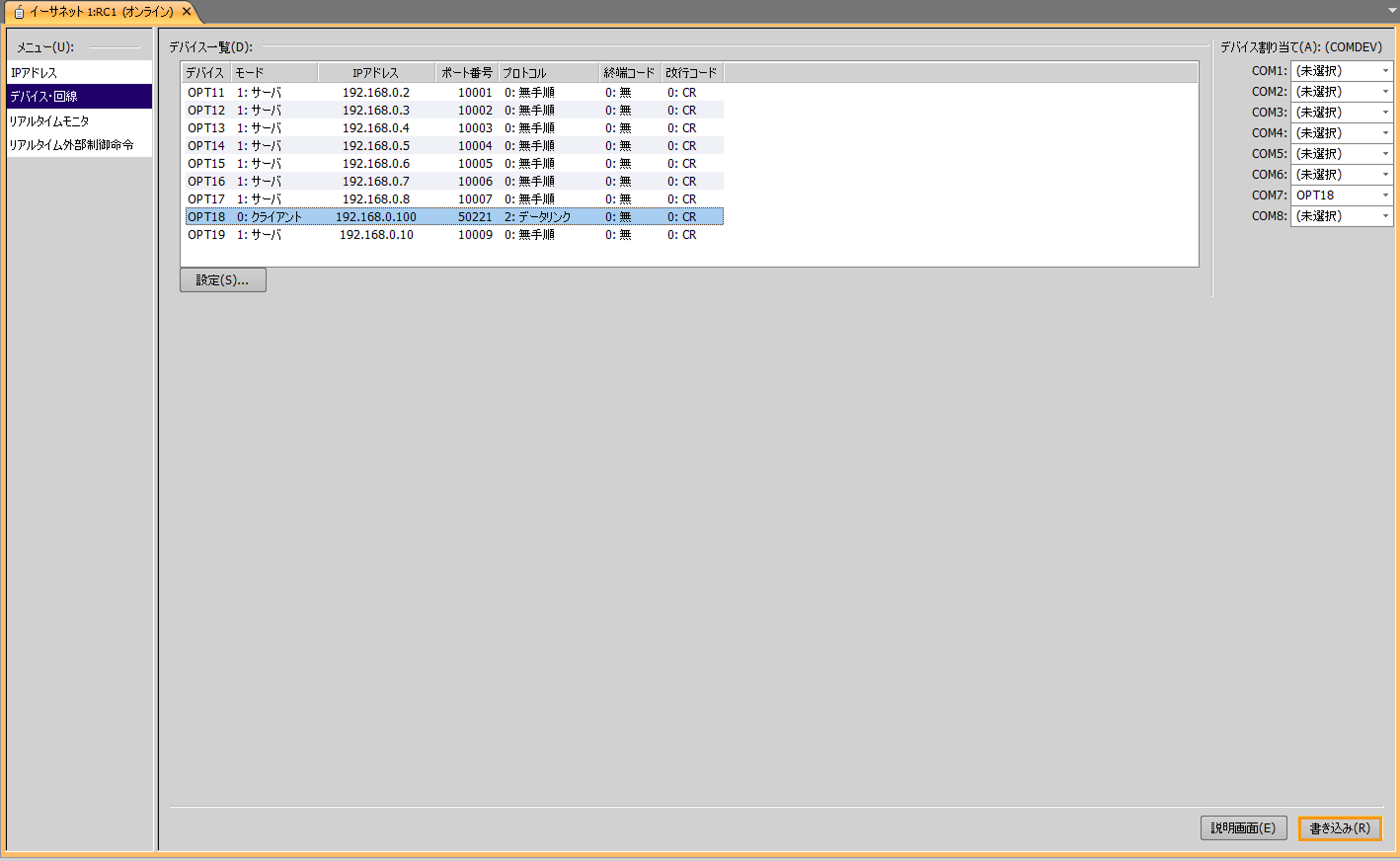
イーサーネット 設定ウィンドウで デバイス・回線 をクリックし、OPT18 デバイスの行をダブルクリックします。
推奨デバイスは OPT18 ですが、使用済みの場合は OPT12〜OPT18 のいずれかを選択してください(OPT11 は使用不可)。
-
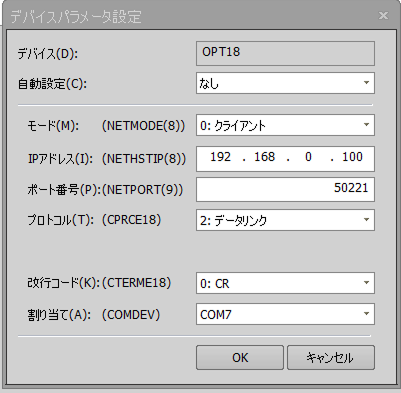
ポップアップウィンドウで以下の設定を行い、OK をクリックします。
-
モード:クライアント を選択します。
-
IP アドレス:Mech-Mind の IPC の IP アドレスを入力します。ロボットの IP アドレスと同一ネットワーク内のアドレスにしてください。
-
ポート番号:50221 を入力します。
-
プロトコル:データリンク を選択します。
-
割り当て:COM7 を推奨します。使用済みの場合は COM1〜COM8 の中から選択してください。
-
-
設定後、書き込み をクリックします。
-
ポップアップウィンドウで はい をクリックします。
-
書き込み完了後、OK をクリックします。
-
その後、ロボットコントローラを再起動します。
ロボットコントローラが Q/R タイプの場合は、続けて次の設定を行います。D タイプの場合はこの手順をスキップし、ビジョンソフトウェアの通信パラメータを設定 に進んでください。
-
左側の ワークスペース で をクリックし、マルチCPU をダブルクリックします。

-
マルチCPU ウィンドウには、シーケンサから読み込んだ設定が表示されます。GX Works3 のマルチ CPU 設定と一致していることを確認してください。
設定が一致しない場合は、三菱電機の公式マニュアルを参照し、シーケンサまたはロボットコントローラ側の設定を調整してください。 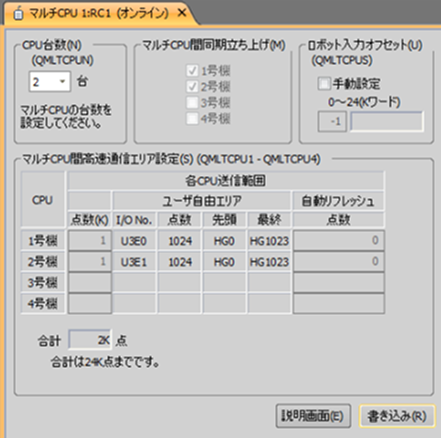
ビジョンソフトウェアの通信パラメータを設定
-
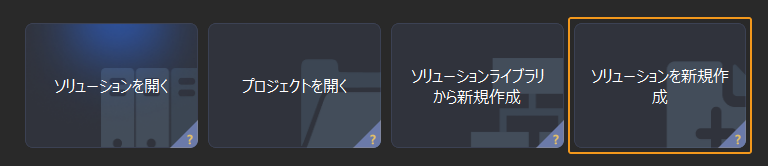
Mech-Visionを起動します。表示される画面によって、以下の方法でプロジェクトを作成します。
-
ようこそ画面が表示された場合、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
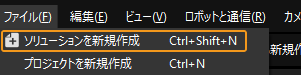
メイン画面が表示された場合、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
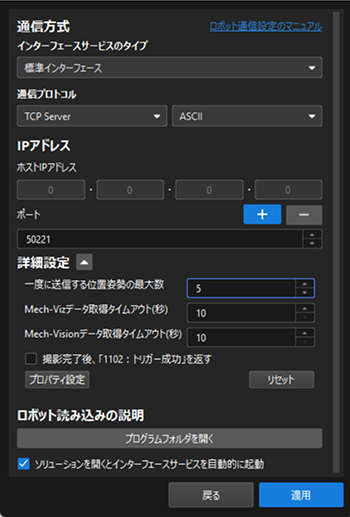
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 のドロップダウンリストから 適応可能なロボット を選択し、ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
通信方式 の画面では、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を ASCII に選択します。
-
ポート番号を 50221(固定値、変更不可)に設定します。設定したポート番号が他のプログラムに使用していないことを確認してください。
-
詳細設定 を展開し、一度に送信する位置姿勢の最大数 を 5 に設定することを推奨します。
設定可能範囲は1~5です。この値は標準インターフェースコマンドで設定したパラメータ値と一致させる必要があります。
-
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-
-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
標準インターフェース通信をテスト
-
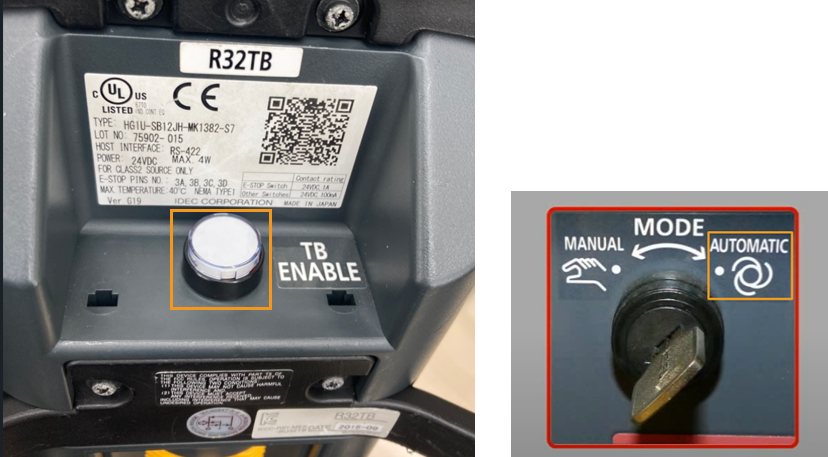
ティーチングボックス背面の TB ENABLE スイッチを押し、ティーチング操作を無効にします(TB ENABLE スイッチのランプが消灯)。その後、コントローラのモードを AUTOMATIC に切り替えます。
-
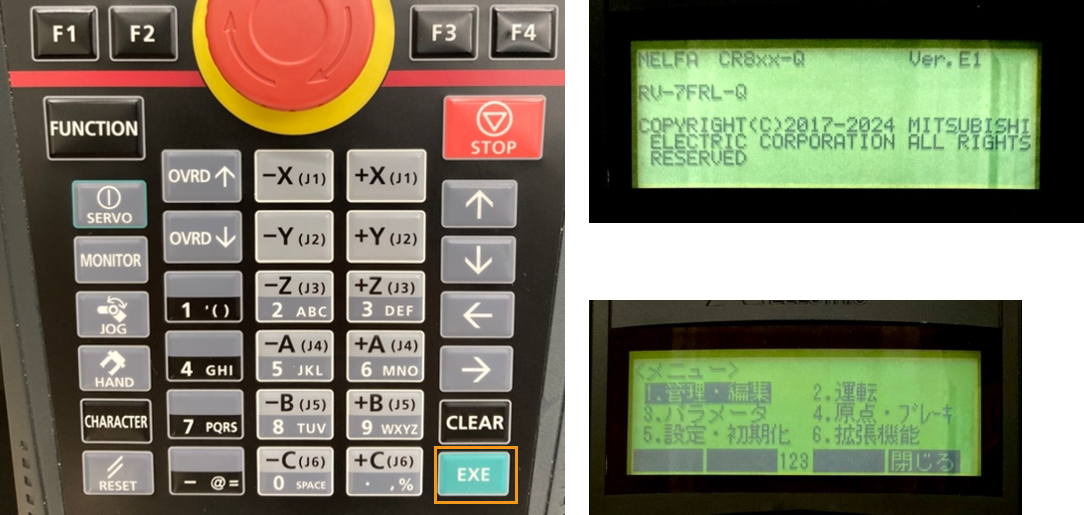
ティーチングボックスの初期画面で EXE を押し、メニュー画面に入ります。
-
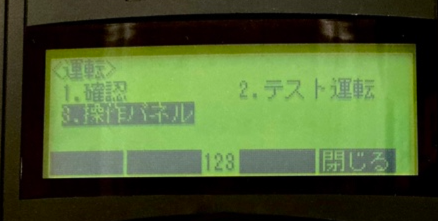
メニュー画面で → キーを使用して 運転 を選択し、EXE を押して運転画面に進みます。
-
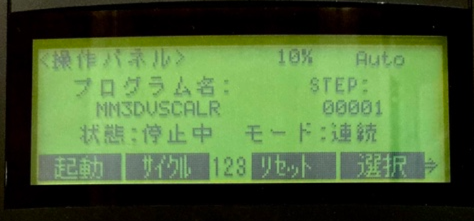
運転画面で ↓ キーを使用して 操作パネル を選択し、EXE を押して操作パネルに入ります。
-
「選択」に対応する機能キー F4 を押し、プログラム選択画面に入ります。
-
プログラム名の入力欄に、使用するプログラム名 MMCOMCHECK を入力し、EXE を押します。
-
「SV.ON」に対応する機能キー F1 を押してサーボ電源をオンにします。「SV.ON」が表示されない場合は FUNCTION を押します。
-
「起動」に対応する機能キー F1 を押すと確認画面が表示されます。
-
「はい」に対応する機能キー F1 を押すと、選択したプログラムが自動で実行されます。
-
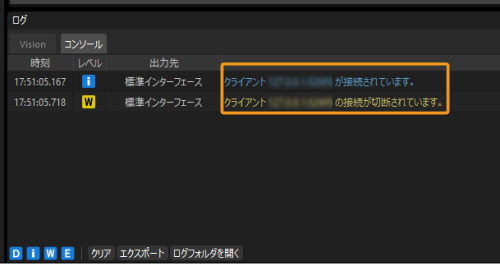
ロボットとビジョンシステム間の通信接続が成功すると、Mech-Vision のログ画面の コンソール タブに関連メッセージが表示されます。
-
ティーチングボックスで STOP を押し、現在実行中のプログラムを停止します。