標準インターフェース通信の設定
本節では、ELITEロボットの標準インターフェース通信の設定について説明します。
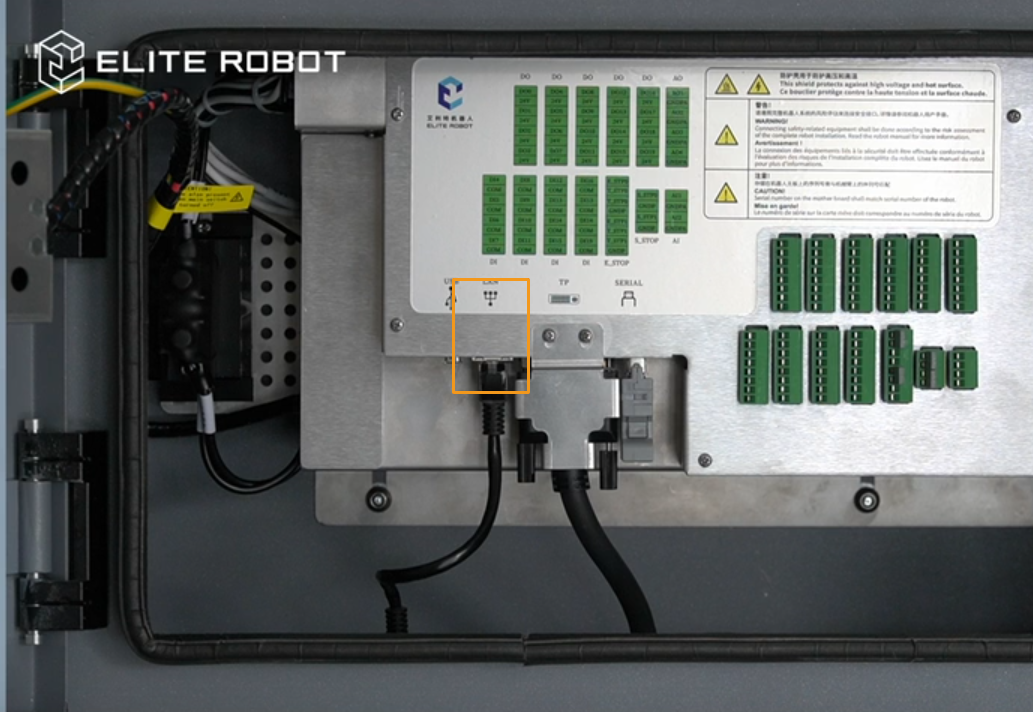
ロボットとIPCを接続
LANケーブルで IPCのLANポート と ロボットコントローラのLANポート を接続します。
IPアドレスを変更
|
以下のいずれかのLANポートのIPアドレスを変更することで、両方のLANポートのIPアドレスが同じネットワークセグメントにあるようにすることができます。
|
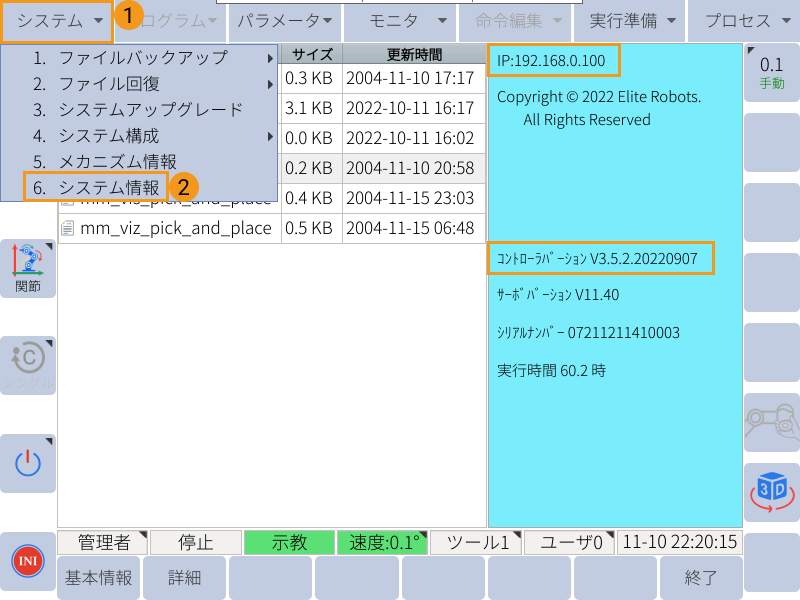
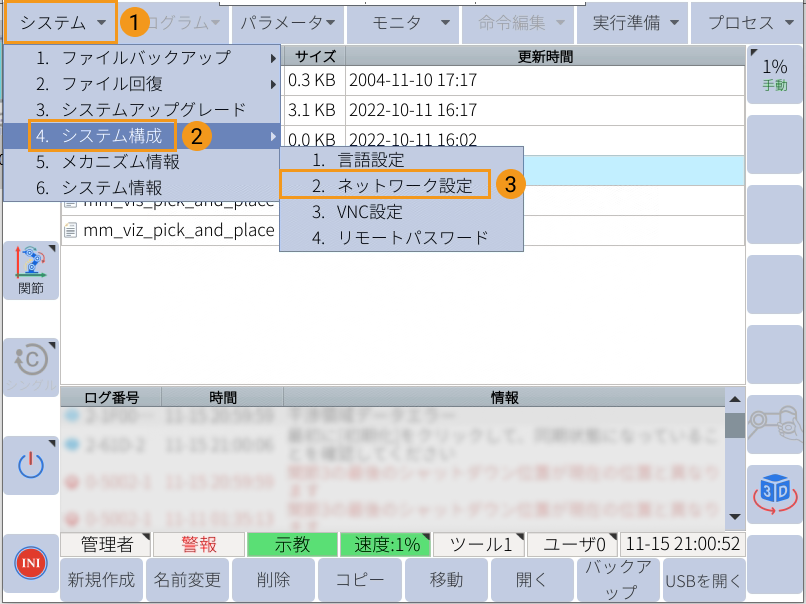
ロボットのIPアドレスを変更するには、以下の手順を実行します。
-
管理者アカウントへ切替:キーを TEACH にし、左下のアカウントモードが 管理者 になっていることを確認します。 管理者 になっていない場合、アカウントモードをタップして 管理者 を選択し、パスワード(初期パスワードは333333)を入力してから、左下隅にある 設定 をタップします。
-
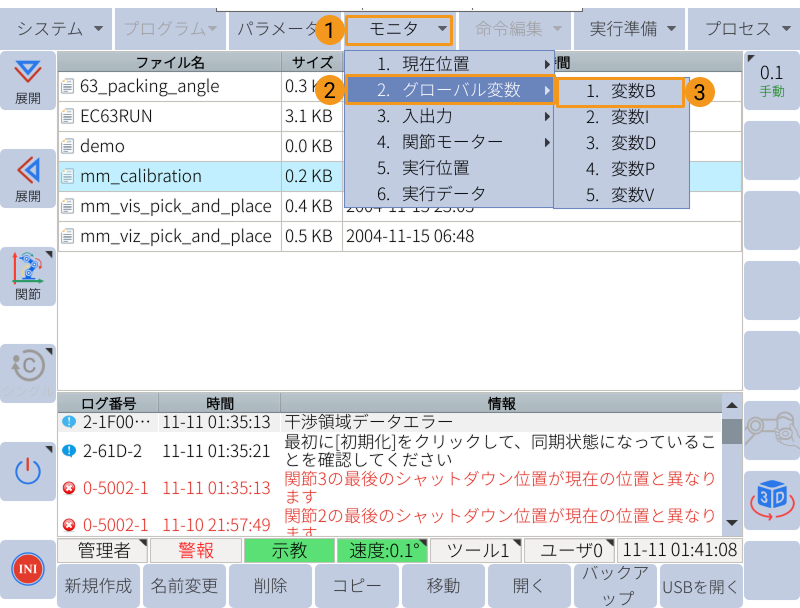
ティーチペンダントで を順番にタップします。
-
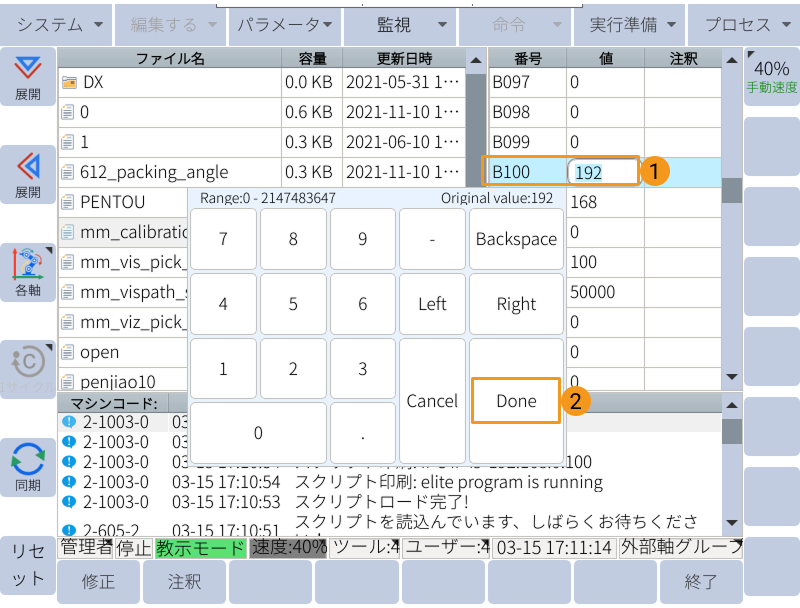
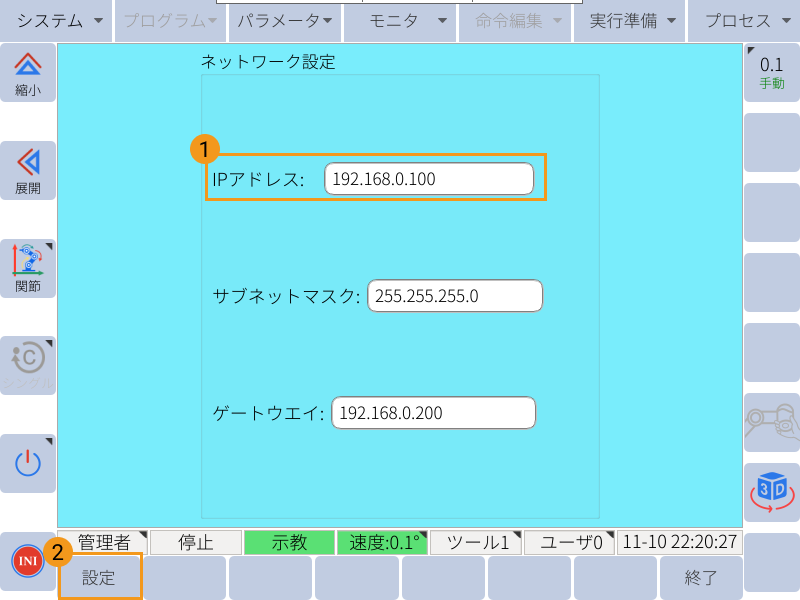
これでIPを変更することができます。IPを変更したら、 設定 をタップして変更を保存します。
「ロボット通信設定」を実行
-
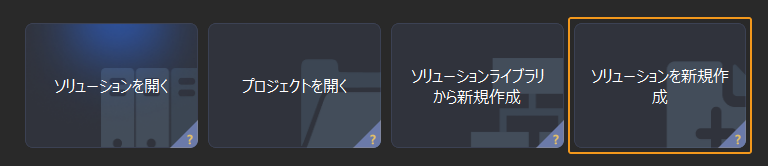
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
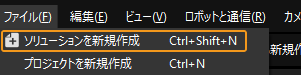
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 のドロップダウンボックスをクリックし、適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
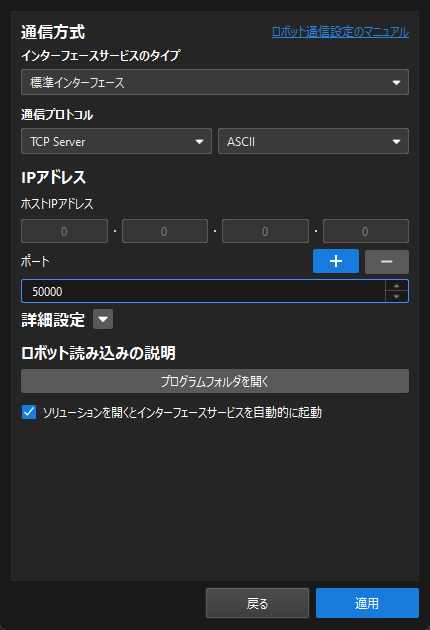
通信方式 の画面で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を ASCII に選択します。
-
ポート番号は50000または50000以上に設定することを推奨します。設定したポート番号が他のプログラムに使用されていないことを確認してください。
-
ロボット読み込みの説明 の下で、プログラムフォルダを開く をクリックします。
その後、読み込みファイルはこのフォルダからコピーされますので、フォルダウィンドウを閉じないようにしてください。 -
(オプション) ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-
-
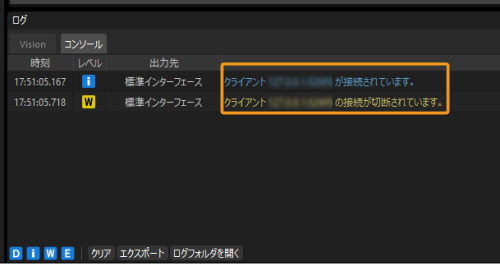
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
標準インターフェースのプログラムの読み込み
以下の手順で標準インターフェースプログラムをロボットに読み込みます。
-
ELITEフォルダ(読み込みプログラムフォルダ)で、rbctrlフォルダをUSBメモリにコピーします。読み込みプログラムフォルダは、Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある
Communication Component/Robot_InterfaceELITEパス内でも見つけることができます。 -
USBメモリをコントローラーに差し込みます。
-
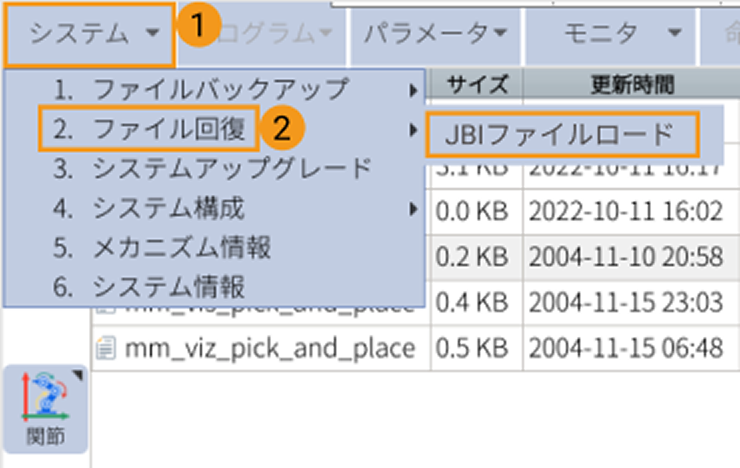
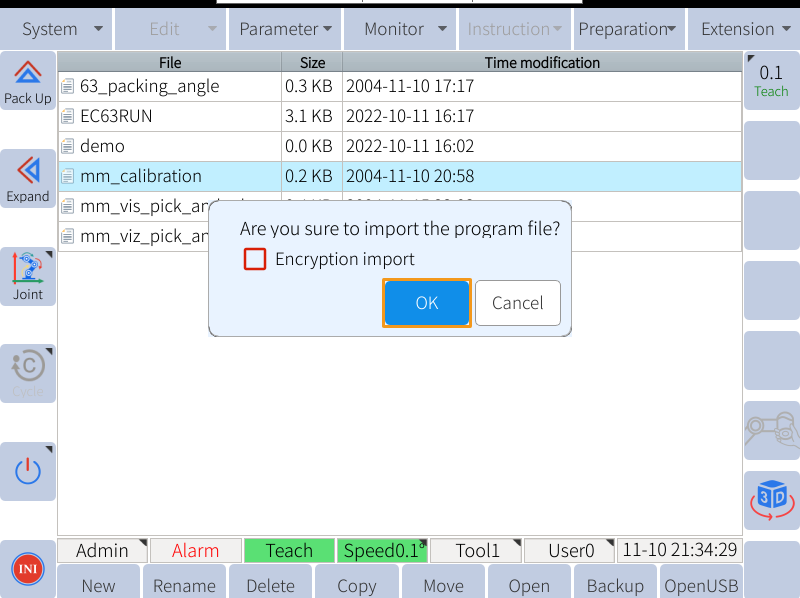
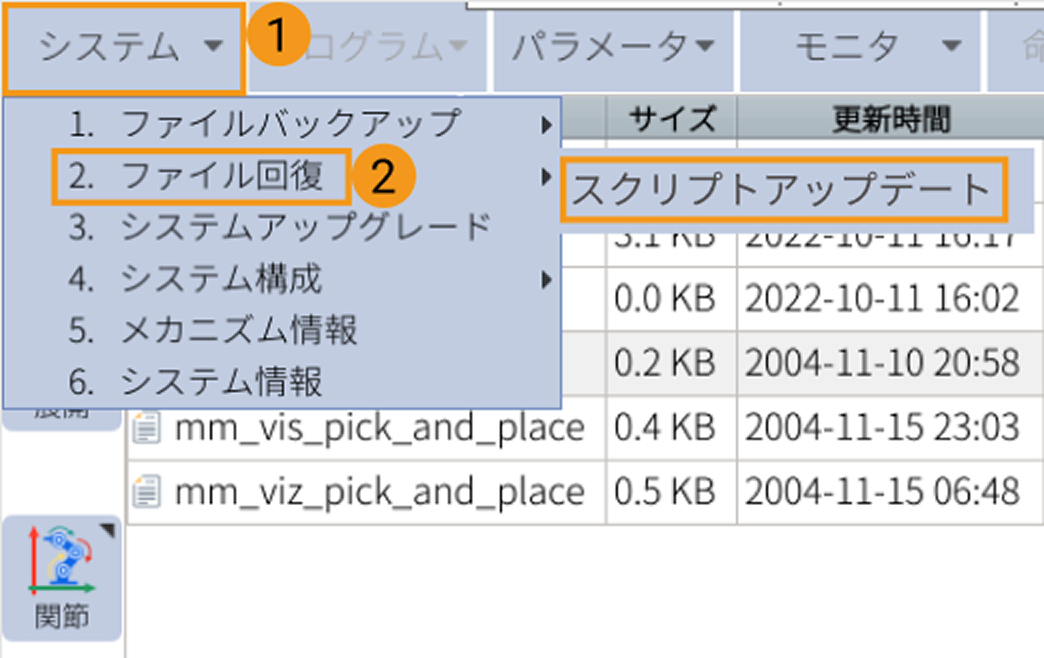
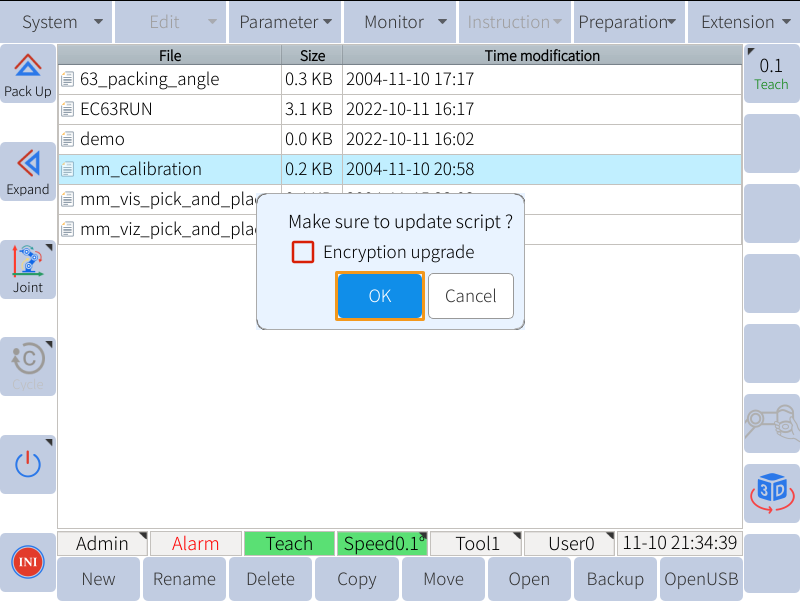
をクリックし、表示されたウィンドウの確認をクリックします。
-
をクリックし、表示されたウィンドウの確認をクリックします。
-
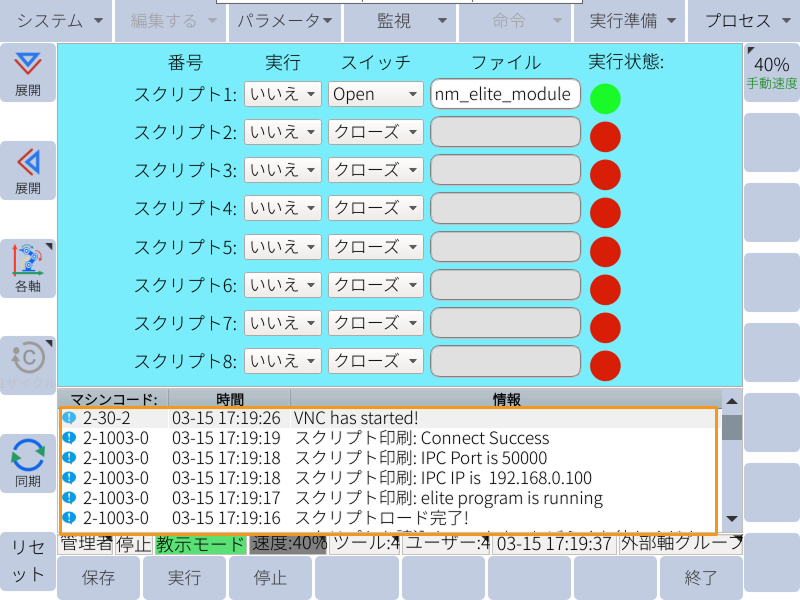
をクリックします。
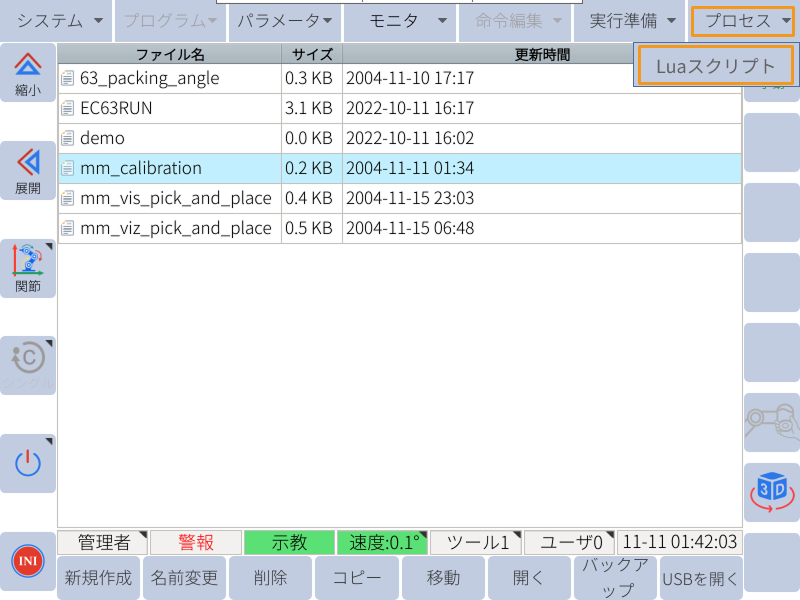
-
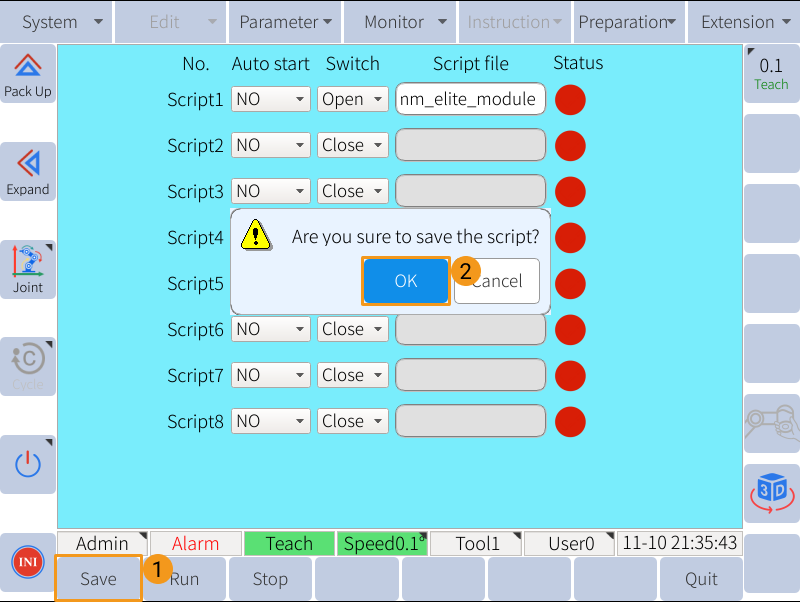
スクリプト1をオンにし、mm_elite_module フォルダを選択します。