mm_vis_pick_and_place
Mech-Visionをトリガーして撮影し、ロボットを把持位置姿勢にガイドします。
|
Luaスクリプトプログラムはバックグラウンドで実行し続けていることを確認してください。そうではないとロボットとの通信を確立できません。 |
プログラムの実行
NOP
WAIT B099 = 0
SET B105 1
//set project id
// SET B108 1
// //recipe id
// SET B099 3
// //set recipe
// WAIT B099 = 0
SET B106 0
//run vision expect num of pose
SET B107 2
//run vision pose type
SET B099 1
//start vision
WAIT B099 = 0
SET B099 2
//receive from vision
WAIT B099 = 0
SET B099 8
//set pose to v101-v120
WAIT B099 = 0
// MOVL V101 V=100MM/S CR=0.000MM
END-
3行目:番号1のMech-Visionプロジェクトをトリガーするプロジェクトに指定します。
-
5行目:Mech-Visionプロジェクトのレシピを設定したい場合に、ここでレシピの番号を指定することができます。
-
7行目:必要に応じて指定したMech-Visionプロジェクトレシピに切り替えます。
-
10行目:Mech-Visionが送信したビジョンポイントを全部受信します(最大20個)。
-
12行目:Mech-Visionに送信する位置姿勢のタイプを「TCP」に指定します。
-
14行目:Mech-Visionをトリガーして実行します。
-
17行目:ビジョンポイントを取得します。
-
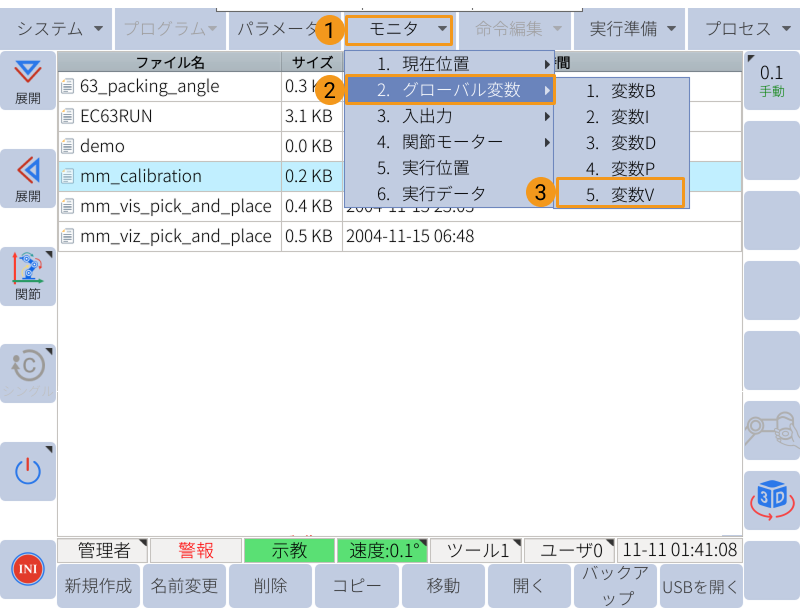
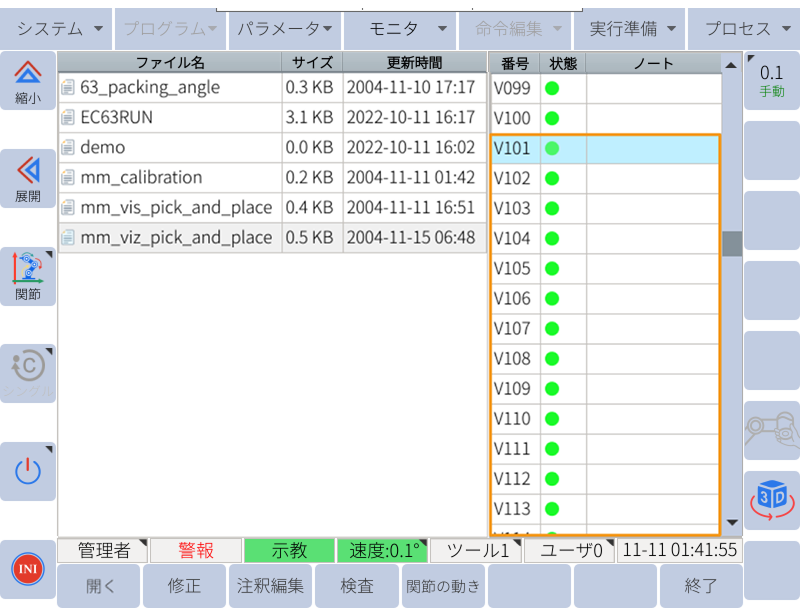
20行目:Mech-Visionから受信したビジョンポイントをV101-V120変数に保存します。
-
23行目:ロボットをビジョンポイントに移動させるための命令を追加できます。