サンプルプログラム6:MM_S6_Viz_ErrorHandle
プログラム概要
機能 |
ロボットはMech-Vizプロジェクトをトリガーして実行し、計画された経路を取得します。その後、ステータスコードを確認して、計画された経路が正常に取得されたかどうかを判断します。経路が正常に取得できた場合、ロボットは把持および配置を実行します。それ以外の場合は、ロボットは停止します。 |
ファイル場所 |
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある |
必要なプロジェクト |
Mech-VisionとMech-Vizプロジェクト |
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
以下はMM_S6_Viz_ErrorHandleサンプルプログラムのコードと関連する説明です。
| このサンプルは、MM_S2_Viz_Basicサンプルに比べて、エラーコードの処理機能(太字部分のコード)のみが追加されています。そのため、MM_S2_Viz_Basicサンプルと同じ部分のコードについては、以下で再度説明することはありません(詳細は MM_S2_Viz_Basicサンプルの説明 をご参照ください)。 |
1: !-------------------------------- ;
2: !FUNCTION: trigger Mech-Viz ;
3: !project and get planned path, ;
4: !handle errors according to ;
5: !status codes (if no point cloud ;
6: !in ROI, retry several times ;
7: !before exit loop) ;
8: !Mech-Mind, 2023-12-25 ;
9: !-------------------------------- ;
10: ;
11: !set current uframe NO. to 0 ;
12: ユーザザヒョウバンゴウ=0 ;
13: !set current tool NO. to 1 ;
14: ツールザヒョウバンゴウ=1 ;
15: !reset counter ;
16: レジ[99]=0 ;
17: !move to robot home position ;
18:カクジク イチ[1] 100% イチギメ ;
19: !initialize communication ;
20: !parameters(initialization is ;
21: !required only once) ;
22: ヨビダシ MM_INIT_SKT('8','127.0.0.1',50000,5) ;
23: !move to image-capturing position ;
24:チョクセン イチ[2] 1000mm/sec イチギメ ;
25: ラベル[1:vision] ;
26: !trigger Mech-Viz project ;
27: ヨビダシ MM_START_VIZ(2,10) ;
28: !get planned path, 1st argument ;
29: !(1) means getting pose in JPs ;
30: ヨビダシ MM_GET_VIZ(1,51,52,53) ;
31: !check whether planned path has ;
32: !been got from Mech-Viz ;
33: !successfully ;
34: モシ レジ[53]<>2100,ジャンプ ラベル[99] ;
35: !save waypoints of the planned ;
36: !path to local variables one ;
37: !by one ;
38: ヨビダシ MM_GET_JPS(1,60,70,80) ;
39: ヨビダシ MM_GET_JPS(2,61,71,81) ;
40: ヨビダシ MM_GET_JPS(3,62,72,82) ;
41: !follow the planned path to pick ;
42: !move to approach waypoint ;
43: !of picking ;
44:カクジク イチレジ[60] 50% イチギメ ;
45: !move to picking waypoint ;
46:カクジク イチレジ[61] 10% イチギメ ;
47: !add object grasping logic here, ;
48: !such as "DO[1]=ON" ;
49: イチジテイシ ;
50: !move to departure waypoint ;
51: !of picking ;
52:カクジク イチレジ[62] 50% イチギメ ;
53: !move to intermediate waypoint ;
54: !of placing ;
55:カクジク イチ[3] 50% ナメラカ100 ;
56: !move to approach waypoint ;
57: !of placing ;
58:チョクセン イチ[4] 1000mm/sec イチギメ ツールホセイ,イチレジ[2] ;
59: !move to placing waypoint ;
60:チョクセン イチ[4] 300mm/sec イチギメ ;
61: !add object releasing logic here, ;
62: !such as "DO[1]=OFF" ;
63: イチジテイシ ;
64: !move to departure waypoint ;
65: !of placing ;
66:チョクセン イチ[4] 1000mm/sec イチギメ ツールホセイ,イチレジ[2] ;
67: !move back to robot home position ;
68:カクジク イチ[1] 100% イチギメ ;
69: シュウリョウ ;
70: ;
71: ラベル[99:vision error] ;
72: モシ レジ[53]=2038,ジャンプ ラベル[2] ;
73: ジャンプ ラベル[999] ;
74: ;
75: ラベル[2] ;
76: !no point cloud in ROI, add ;
77: !handling logic here ;
78: !self-adding then check retry ;
79: !counter ;
80: レジ[99]=レジ[99]+1 ;
81: !jump back to vision retry label ;
82: !if the number of retry times is ;
83: !less than 3 ;
84: モシ レジ[99]<3,ジャンプ ラベル[1] ;
85: !reset counter and exit loop if ;
86: !the number of retry times has ;
87: !reached 3 ;
88: レジ[99]=0 ;
89: ジャンプ ラベル[999] ;
90: ;
91: ラベル[999:other error] ;
92: !add other error handling logic ;
93: !here ;
94: イチジテイシ ;上記のサンプルプログラムの処理流れは、下図の通りです。
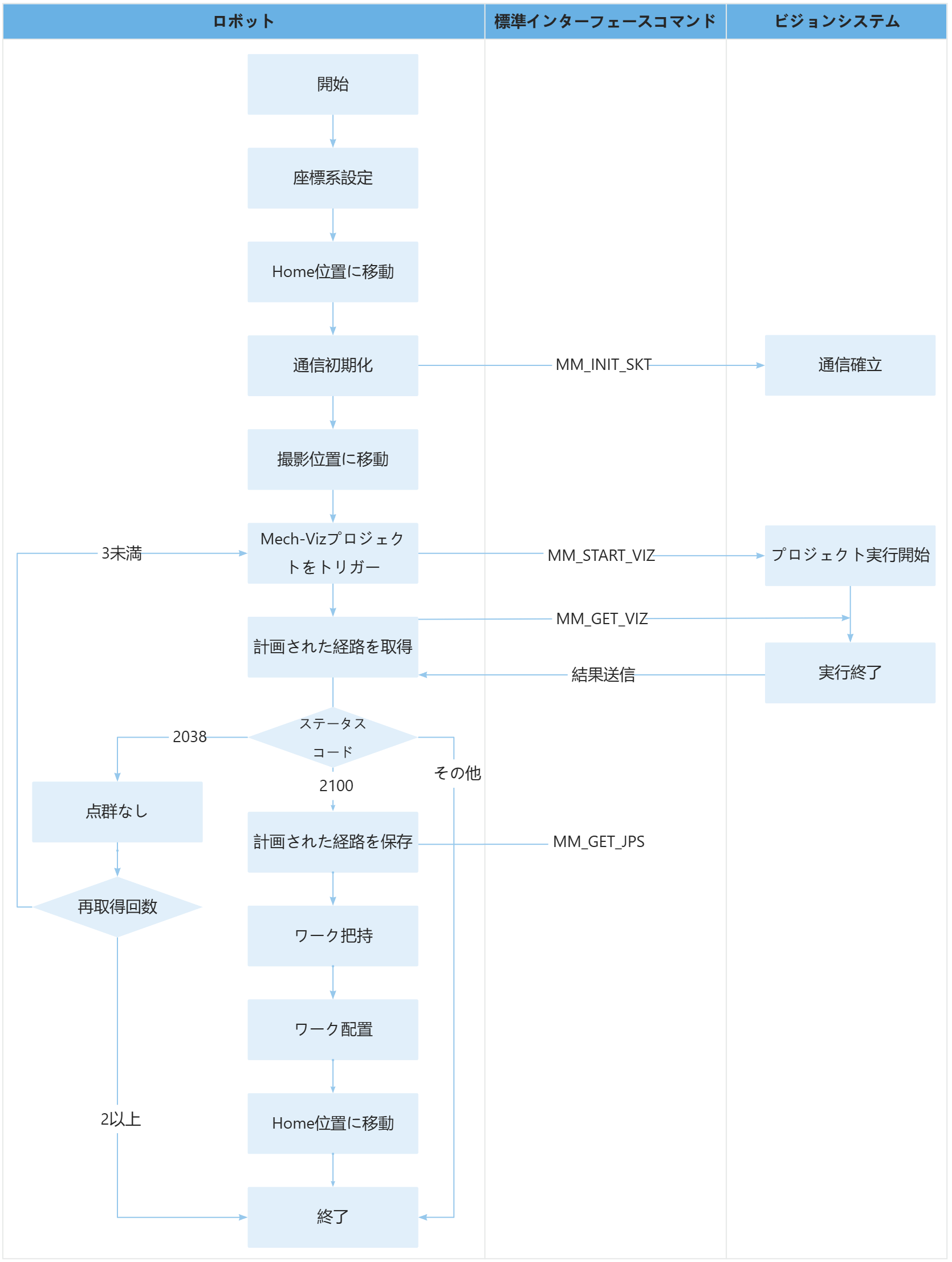
下表は、エラーコード処理のコードとその説明です。
| 処理流れ | コートと説明 | ||
|---|---|---|---|
異なるステータスコードへの処理 |
ロボットが MM_GET_VIZ コマンドを実行した後、コマンド実行のステータスコードはレジ[53]に保存されます。ユーザーは具体的なステータスコードに基づいて適切な処理を行うことができます。このサンプルでの処理ロジックは次の通りです。
|