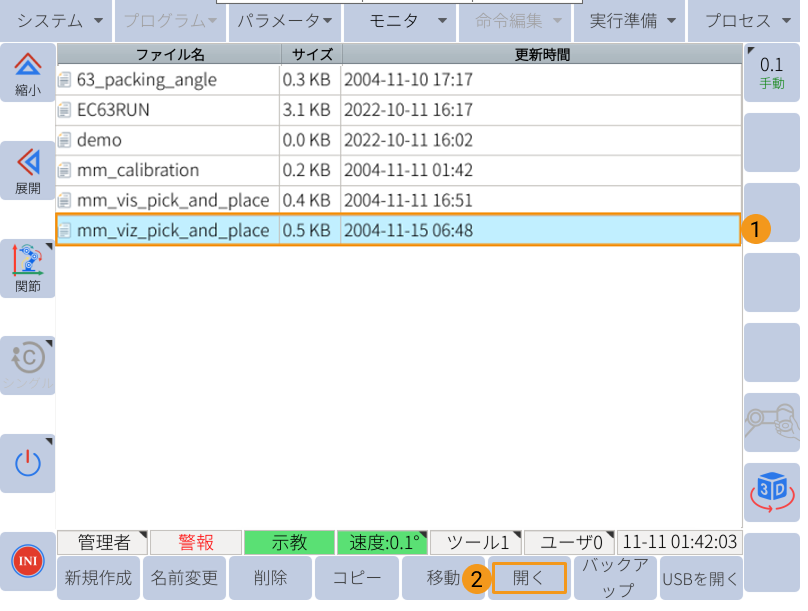
mm_viz_pick_and_place
Mech-Vizをトリガーして経路を計画し、ロボットを経路点にガイドします。
|
Luaスクリプトプログラムはバックグラウンドで実行し続けていることを確認してください。そうではないとロボットとの通信を確立できません。 |
プログラムの実行
NOP
WAIT B099 = 0
SET B109 1
//run viz pose type
SET B099 4
//start viz
WAIT B099 = 0
// SET B110 1
// //set branch id
// SET B111 1
// //set branch out port
// SET B099 5
// //set branch
// WAIT B099 = 0
// SET B112 2
// //set index id
// SET B113 1
// //set index out port
// SET B099 6
// //set index
// WAIT B099 = 0
SET B114 2
// receive viz pose type
SET B099 7
// receive from viz
WAIT B099 = 0
SET B099 9
// set viz to v101-v120 p101-p120
WAIT B099 = 0
// MOVL V100 V=100MM/S CR=0.000MM
END-
3行目:Mech-Vizに送信する位置姿勢のタイプを現在の関節角度とフランジ位置姿勢に指定します。
-
5行目:Mech-Vizをトリガーして実行します。
-
8行目:これから実行するブランチを指定します。
-
10行目:ブランチの出口を設定します。
-
12行目:Mech-Vizプロジェクトをトリガーし、指定したブランチの出口から実行します。
-
15行目:インデックスが付いたステップ番号を指定します。
-
17行目:現在のインデックスのパラメータ値を設定します。
-
19行目:インデックスを設定します。
-
22行目:Mech-Vizから受信した経路点のタイプを「TCP」に設定します。
-
24行目:計画した経路を取得します。
-
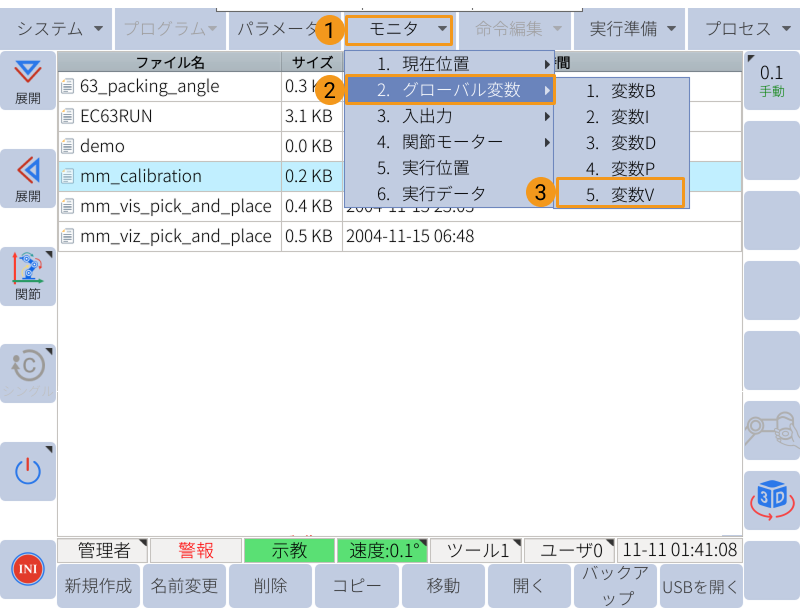
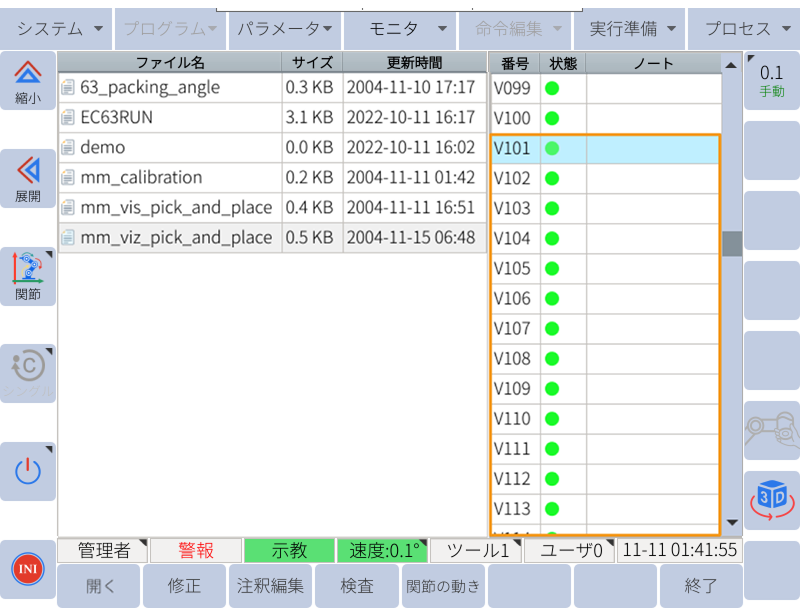
27行目:Mech-Vizから返された経路点の位置姿勢をV101-v120変数に保存します(関節角度の場合にP101-P120変数に保存する)。
-
30行目:ロボットを経路点に移動させるための命令を追加できます。