標準インターフェースコマンド
KAWASAKIで標準インターフェースを用いてロボットプログラミングを行う際は、以下の点にご注意ください。
-
複数のパラメータはコンマで区切る必要があります。
-
すべてのパラメータはプログラムファイル内でローカル変数として定義する必要があります。
-
パラメータは入力パラメータあるいは出力パラメータと定義することが可能です。
-
入力引数は定数、グローバル変数、ローカル変数を指定することができます。出力引数はグローバル変数、ローカル変数を指定することができます。
Mech-Visionプロジェクトの実行
このコマンドを実行すると、Mech-Visionプロジェクトが実行され、カメラ撮影とビジョン処理による認識が行われます。Mech-Vizを使用せずMech-Visionを使用する場合に使用します。
パラメータの説明
| 入力パラメータ | 説明 |
|---|---|
.job |
Mech-Visionのプロジェクト番号は、Mech-Visionのプロジェクトリストで確認できます。プロジェクト名の前の数字は、プロジェクト番号を表します。 |
.pos_num_need |
ビジョンポイントの期待数で、Mech-Visionから取得したいビジョンポイントの数です。設定可能な範囲は0~20で、0に設定するとすべてのビジョンポイントが取得されます。 |
.sendpos_type |
ロボット位置姿勢のタイプで、ロボット実機の位置姿勢をMech-Visionに送信するタイプを設定します。パラメータ範囲は0~3です。
|
.#start_vis |
.sendpos_type=3の場合のみ、事前定義済みのロボットの関節角度データが使用されます。.sendpos_typeが3以外の場合、このパラメータの値は#start_visとすることができます。 |
サンプル
-
サンプル1:
CALL mm_start_vis(1,1,1,#start_vis)このサンプルを実行すると、Mech-Visionプロジェクト1が実行されます。Mech-Visionプロジェクト1が1つのビジョン結果を返すことを期待します。ロボットは、#start_visデータを使用せずに、現在の関節角度とフランジデータをMech-Visionに送信します。
-
サンプル2:
CALL mm_start_vis(1,1,3,#start_vis)このサンプルを実行すると、Mech-Visionプロジェクト1が実行されます。Mech-Visionプロジェクト1が1つのビジョン結果を返すことを期待します。ロボットは#start_visに保存した関節角度データをMech-Visionに送信し、経路計画設定ツールでの仮想ロボットに計画の開始位置を設定します。
ビジョン目標点の取得
Mech-Vizを使用せずMech-Visionを使用する場合に使用します。対応するMech-Visionプロジェクトからビジョン認識結果を取得します。
パラメータの説明
| 入力パラメータ | 説明 |
|---|---|
.job |
Mech-Visionのプロジェクト番号は、Mech-Visionのプロジェクトリストで確認できます。プロジェクト名の前の数字は、プロジェクト番号を表します。 |
| 出力パラメータ | 説明 |
|---|---|
.pos_num |
取得した出力結果の数を記録するための変数です。 |
.ret |
ステータスコードを記録するための変数です。詳細については、 標準インターフェースのステータスコード一覧とトラブルシューティング をご参照ください。 |
Mech-Vizプロジェクトの実行
Mech-VisionとMech-Vizの両方を使用する場合に使用します。Mech-Vizプロジェクトを実行し、それに対応するMech-Visionプロジェクトも実行されます。この時Mech-Vizのシミュレーション上でロボットの初期関節位置が設定されます。
パラメータの説明
| 入力パラメータ | 説明 |
|---|---|
.sendpos_type |
ロボット位置姿勢のタイプです。パラメータ範囲は0~2です。
|
.#start_viz |
.sendpos_type=2の場合のみ、この関節角度データが使用されます。.sendpos_typeが2以外の場合、このパラメータの値は#start_vizとすることができます。 |
Mech-Vizによって計画された動作経路を取得
このコマンドは、Mech-Vizプロジェクトに計画した把持経路を取得するために使用されます。
パラメータの説明
| 入力パラメータ | 説明 |
|---|---|
.getpos_type |
取得する経路上の点の位置姿勢タイプを設定します。1または2に設定することができます。
|
| 出力パラメータ | 説明 |
|---|---|
.pos_num |
取得した位置姿勢の数を記録するための変数です。 |
.vispos_num |
最初の「ビジョン処理による移動」が経路全体における位置番号を保存するの変数です。例えば、「移動_1、移動_2、ビジョン処理による移動_1、移動_3」の場合、最初のビジョン処理による移動の位置は3です。ビジョン処理による移動が含まれていない場合、0を返します。 |
.ret |
ステータスコードを記録するための変数です。詳細については、 標準インターフェースのステータスコード一覧とトラブルシューティング をご参照ください。 |
ビジョン結果を取得
関節角度を取得(Mech-Vizを使用する場合にのみ有効)
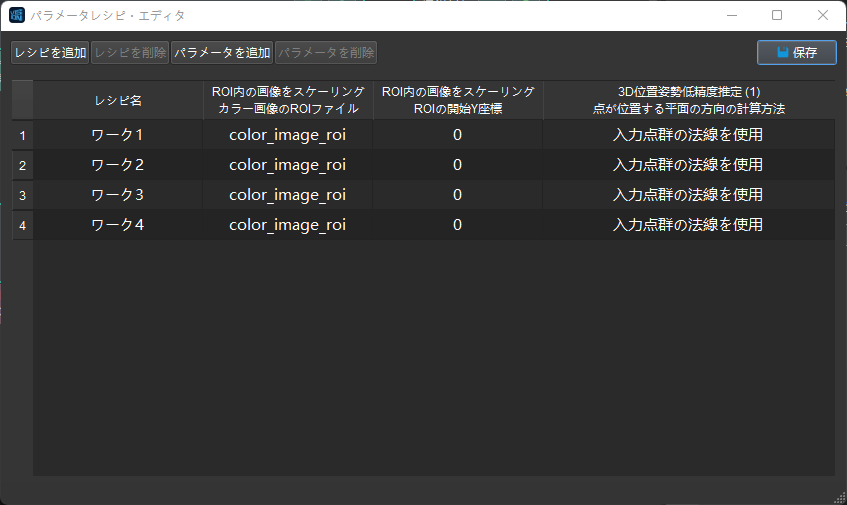
Mech-Visionのパラメータレシピの切替
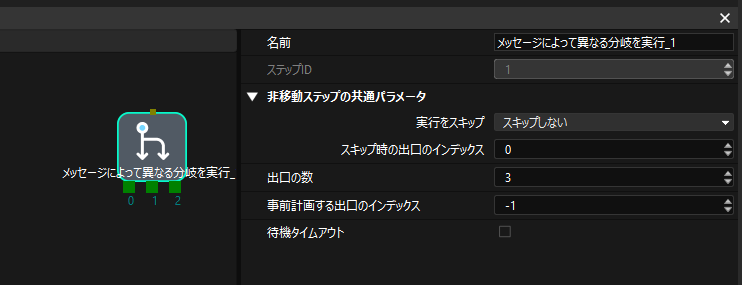
Mech-Viz分岐を選択
Mech-Vizプロジェクトに メッセージによって異なる分岐を実行 ステップがある場合、Mech-Vizプロジェクトの「メッセージによって異なる分岐を実行」ステップの出口を制御するために使用されます。 このコマンドの前にmm_start_vizを実行する必要があります。Mech-Vizが「メッセージによって異なる分岐を実行」ステップに実行すると、203コマンドが分岐出口を送信するのを待ちます。
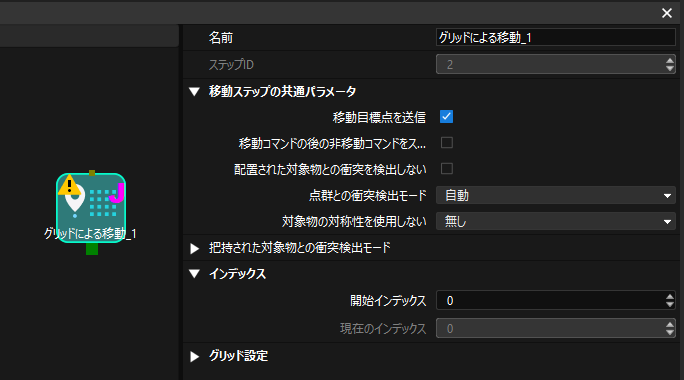
移動インデックスを設定
リストによる移動、グリッドによる移動、事前計画パレットパターン、カスタマイズのパレットパターンなど、インデック機能を持つ移動ステップは、このコマンドを実行することでインデックス値を設定することができます。 このコマンドを呼び出す前にmm_start_vizを実行する必要があります。
ソフトウェアのステータスを取得
Mech-Vision、Mech-Viz、Mech-Centerの実行ステータスを取得するために使用されます。現在、Mech-Visionのプロジェクトステータスを確認できます。
パラメータの説明
| 出力パラメータ | 説明 |
|---|---|
.ret |
ステータスコードを記録するための変数です。詳細については、 標準インターフェースのステータスコード一覧とトラブルシューティング をご参照ください。 |
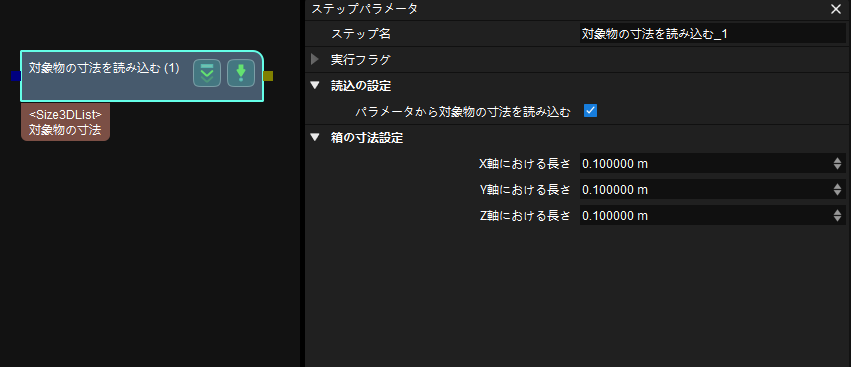
Mech-Visionプロジェクトへ対象物の寸法を送信
DOリストを取得
Mech-Vizにある吸盤パテーション/複数把持を使用する際に、このコマンドで計画したパテーションのDO信号リストを取得することができます。このコマンドを呼び出す前に、mm_get_vizdataを実行する必要があります。
XXXX/Mech-Center-xxx/tool/viz_project/suction_zone のサンプルプロジェクトを参考にしてMech-Vizプロジェクトを作成し、吸盤のコンフィグファイルを設定する必要があります。
|
外部位置姿勢を設定
このコマンドは位置姿勢データを動的に送信するために使用されます。Mech-Vizの 外部移動 ステップと併用する必要があります。このコマンドは、 XXXX/Mech-Center-xxx/tool/viz_project/outer_move にあるプロジェクトと併用する必要があります。また、実行する前に 外部移動 をワークフローの適切な場所に配置する必要があります。
このコマンドを呼び出す前に、mm_start_vizを実行する必要があります。
キャリブレーション
カメラの外部パラメータをキャリブレーションするときに使用します。Mech-Visionのカメラキャリブレーション機能と連動してキャリブレーションを自動的に行います。詳細については、 キャリブレーションの操作手順 をご参照ください。
Mech-Visionのカスタマイズされたデータを取得
このコマンドは、Mech-Visionの「出力」ステップからカスタマイズされたデータを受信するために使用されます。つまり、posesとlabels以外のポートのデータを受信します(ステップパラメータ「ポートタイプ」を「カスタム」に設定する場合)。データは、ポート名のアルファベット順にA-Zまで並んでいます。
パラメータの説明
| 入力パラメータ | 説明 |
|---|---|
.job |
Mech-Visionのプロジェクト番号は、Mech-Visionのプロジェクトリストで確認できます。プロジェクト名の前の数字は、プロジェクト番号を表します。 |
| 出力パラメータ | 説明 |
|---|---|
.pos_num |
返されたビジョンポイントの数を保存するために使用されます。 |
.ret |
このコマンドが実行した後に返されたステータスコードを保存するために使用されます。 |
このサンプルを実行した後、返されたビジョンポイントでの位置姿勢とラベルデータはmm_get_pose(.index,.&targetpos,.label,.speed) プログラムから取得できます。カスタマイズされたデータはvis_custom_data[]の2次元配列に格納されています。
Mech-Vizから経路点と計画結果を取得
このコマンドは、Mech-Vizから計画した経路を取得するために使用されます。経路点は、一般的な移動経路点または「ビジョン処理による移動」の経路点であることができます。経路点には、位置姿勢、速度、ツール情報、ワーク情報などが含まれる場合があります。
このコマンドを実行して得られる経路点は、次の3つのいずれかになります。
-
「ビジョン処理による移動」以外の移動経路点に加えて、その情報には、運動タイプ(関節運動または直線運動)、ツールID、および速度が含まれます。
-
「ビジョン処理による移動」の経路点です。その情報には、ラベル、把持されたワークの合計数、今回把持されたワークの数、吸盤のエッジコーナー番号、TCPオフセット、ワークの向き、およびワークグループのサイズが含まれます。
-
カスタマイズされたデータを含む、「ビジョン処理による移動」の経路点です。この場合、Mech-Visionプロジェクトのステップ「出力」のポートタイプを「カスタム」に設定する必要があります。
パラメータの説明
| 入力パラメータ | 説明 |
|---|---|
.getpos_type |
返されたデータの予期形式で、範囲は1~4です。 |
以下は、4つの返されたデータの予期形式についての説明です。
| 返されたデータの予期形式 パラメータ | 返されたデータの予期形式 説明 |
|---|---|
1 |
位置姿勢(JPs形式),運動タイプ, ツールID, 速度,カスタマイズされたデータの数, カスタマイズされたデータ1, ..., カスタマイズされたデータN |
2 |
位置姿勢(TCP形式),運動タイプ, ツールID, 速度,カスタマイズされたデータの数, カスタマイズされたデータ1, ..., カスタマイズされたデータN |
3 |
位置姿勢(JPs形式), 運動タイプ, ツールID, 速度, ビジョン計画結果, カスタマイズされたデータの数, カスタマイズされたデータ1, ..., カスタマイズされたデータN |
4 |
位置姿勢(TCP形式), 運動タイプ, ツールID, 速度, ビジョン計画結果, カスタマイズされたデータの数, カスタマイズされたデータ1, ..., カスタマイズされたデータN |
位置姿勢
経路点の位置姿勢は、ロボット関節角度(JPs、単位は度)、ツール位置姿勢(TCP、3次元座標はミリメートル、オイラー角は度)のいずれかであり、その形式は送信するコマンドパラメータに依存します。
運動タイプ
-
1:関節運動(MOVEJ) -
2:直線運動(MOVEL)
ツールID
経路点で使用するツール番号です。 -1は、ツールが使用されていないことを意味します。
速度
経路点での速度のパーセンテージ値(単位は%)、つまり、Mech-Vizプロジェクトでこの経路点に対応する移動ステップのパラメータに設定した速度に、Mech-Vizで設定したグローバル速度を掛けたものです。
ビジョン計画結果
経路内の計画結果の情報で(経路点が移動ステップ「ビジョン処理による移動」に対応する場合)、通常は段ボール箱の複数把持・配置に使用されます。情報は次のとおりです。
-
ラベル:10個の正の整数で構成され、デフォルトは10個の0です。
-
把持されたワークの合計数。
-
今回把持されたワークの数。
-
吸盤エッジコーナー番号:ワークが吸盤のどのエッジに近いかを指定するために使用されます。吸盤のエッジコーナー番号は、Mech-Vizのリソースパネルで対応するロボットハンド名をダブルクリックし、 制御ロジック設定 をクリックすると表示されるようになります。
-
ツール位置姿勢(TCP)のオフセット(ワークの中心に対応するTCPから実際のTCPまでのオフセットです)。
-
ワークの向き(TCPのX軸に対するワーク座標系のX軸の方向です)。
-
ワークグループのサイズ。
カスタマイズされたデータの数
Mech-Visionプロジェクトの「出力」ステップでポートタイプが「カスタム」に設定された場合に出力されたposesとlabels以外のポートのデータ数です。
カスタイズされたデータ
Mech-Visionプロジェクトの「出力」ステップでポートタイプが「カスタム」に設定された場合に出力されたposesとlabels以外のポートのデータです。 カスタマイズされたデータは、ポート名のA–Zの順に並べられています。
| 出力パラメータ | 説明 |
|---|---|
.pos_num |
受信した経路点の数を保存するために使用されます。 |
.vispos_num |
最初の「ビジョン処理による移動」が経路全体における位置を保存するための変数です。 例えば、「移動_1、移動_2、ビジョン処理による移動_1、移動_3」の場合、最初のビジョン処理による移動の位置は3です。ビジョン処理による移動がない場合、このパラメータは0になります。 |
.ret |
このコマンドが実行した後に返されたステータスコードを保存するために使用されます。 |
正常に呼び出された場合、返されたデータは下表のように固定変数に保存されます。
| データ | 変数 |
|---|---|
J1-J6関節角度 |
vis_pos_j1[],vis_pos_j2[],vis_pos_j3[],vis_pos_j4[],vis_pos_j5[],vis_pos_j6[] |
TCP位置姿勢データ(XYZOAT) |
vis_pos_x[],vis_pos_y[],vis_pos_z[],vis_pos_o[],vis_pos_a[],vis_pos_t[] |
速度 |
vis_pos_spd[i] |
運動タイプ |
vis_pos_type[i] |
ツールID |
vis_pos_tool[i] |
Mech-Visionのカスタマイズされたデータ |
vis_custom_data[i, j] |
ビジョン計画結果 |
vis_plan_result[i, j] |
Mech-Visionの「経路計画」ステップの結果を取得
Mech-Visionプロジェクトを実行した後、このコマンドはMech-Visionプロジェクトの「経路計画」ステップから出力された衝突のない把持経路を取得するために使用されます。
このコマンドを使用する時、Mech-Visionの「出力」ステップの ポートタイプ を「事前定義済み(ロボット経路)」に設定する必要があります。
パラメータの説明
| 入力パラメータ | 説明 |
|---|---|
.job |
Mech-Visionのプロジェクト番号は、Mech-Visionのプロジェクトリストで確認できます。プロジェクト名の前の数字は、プロジェクト番号を表します。 |
.getpos_type |
「経路計画」ステップから返された経路点の位置姿勢タイプを指定します。
|
| 出力パラメータ | 説明 |
|---|---|
.pos_num |
このコマンドを実行した後に返された経路点の数を保存するために使用されます。 |
.vispos_num |
経路計画設定ツールで設定された「ビジョン処理による移動」が経路全体における位置を保存するために使用されます。 例えば、「移動_1、移動_2、ビジョン処理による移動_1、移動_3」の場合、ビジョン処理による移動の位置は3です。 ビジョン処理による移動がない場合、このパラメータは0になります。 |
.ret |
このコマンドが実行した後に返されたステータスコードを保存するために使用されます。 |