AUBO
本節では、VizによりAUBOロボットをティーチングする方法について説明します。主に次の手順が含まれます。
コントローラバージョンを確認
コントローラのバージョンは4.5.44以上でなければなりません。4.5.44より低い場合、AUBOのアフターサービスに連絡してアップグレードしてください。
ティーチペンダントの をクリックして Server Version の行でコントローラのバージョンを確認します。
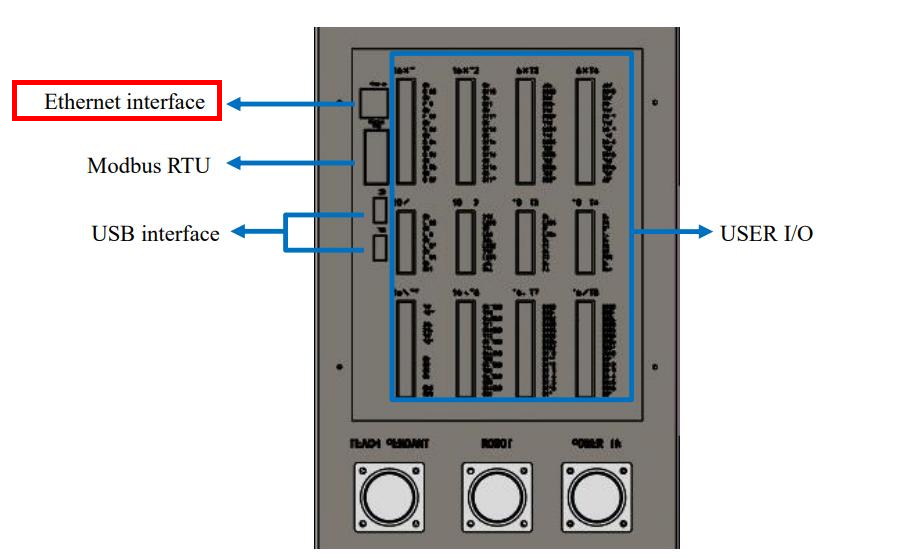
ロボットの接続状態をテスト
詳細については、 ロボットの接続状態をテスト をご参照ください。
エラー処理
ファイルをコピーした後、ロボットに接続できなく、かつ DLL load failed: %1 は有効なWin 32 プログラムではありません というエラーメッセージが表示されたら、IPCのC\+ランタイムライブラリが完全であるかを確認してください。完全なC+ランタイムライブラリは下図に示します。
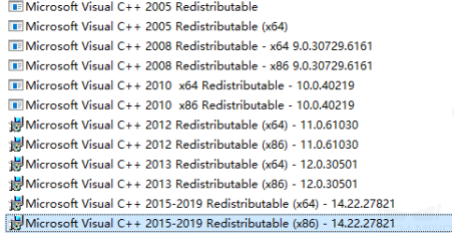
C++ランタイムライブラリが完全でなければ、 vc ランタイムライブラリ修復 DirectX Repair V3.9 修復 を使用してください 。