ロボットの接続状態をテスト
Mech-Vizでロボットを設定
-
Mech-Vizを起動し、キーボードの
Ctrl+Nを押してプロジェクトを新規作成し、ロボット実機が対応する仮想ロボットを選択します。 -
Ctrl+Sを押して、プロジェクトを保存するフォルダを作成または選択します。 -
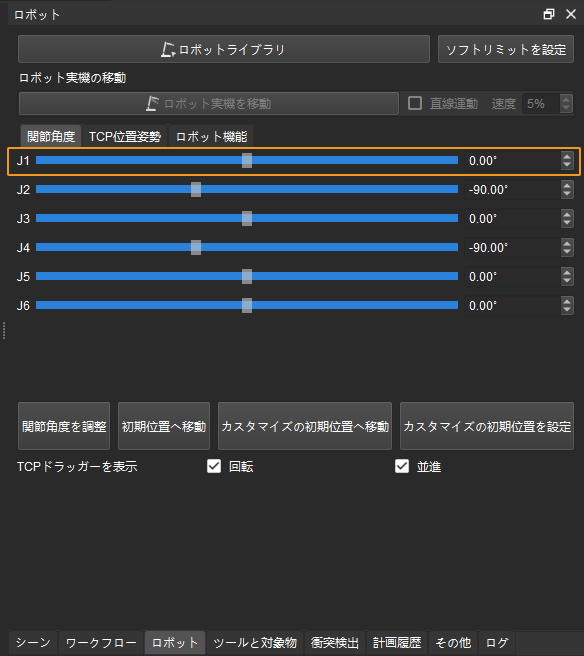
ツールバーで速度と加速度を5%に設定します。
-
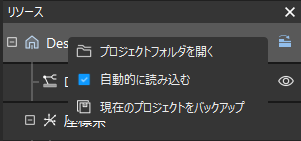
Mech-Vizプロジェクトを 自動読み込み に設定します。プロジェクト名にカーソルを合わせて右クリックをして、[自動的に読み込む]を有効にします。
Mech-Centerの設定を確認
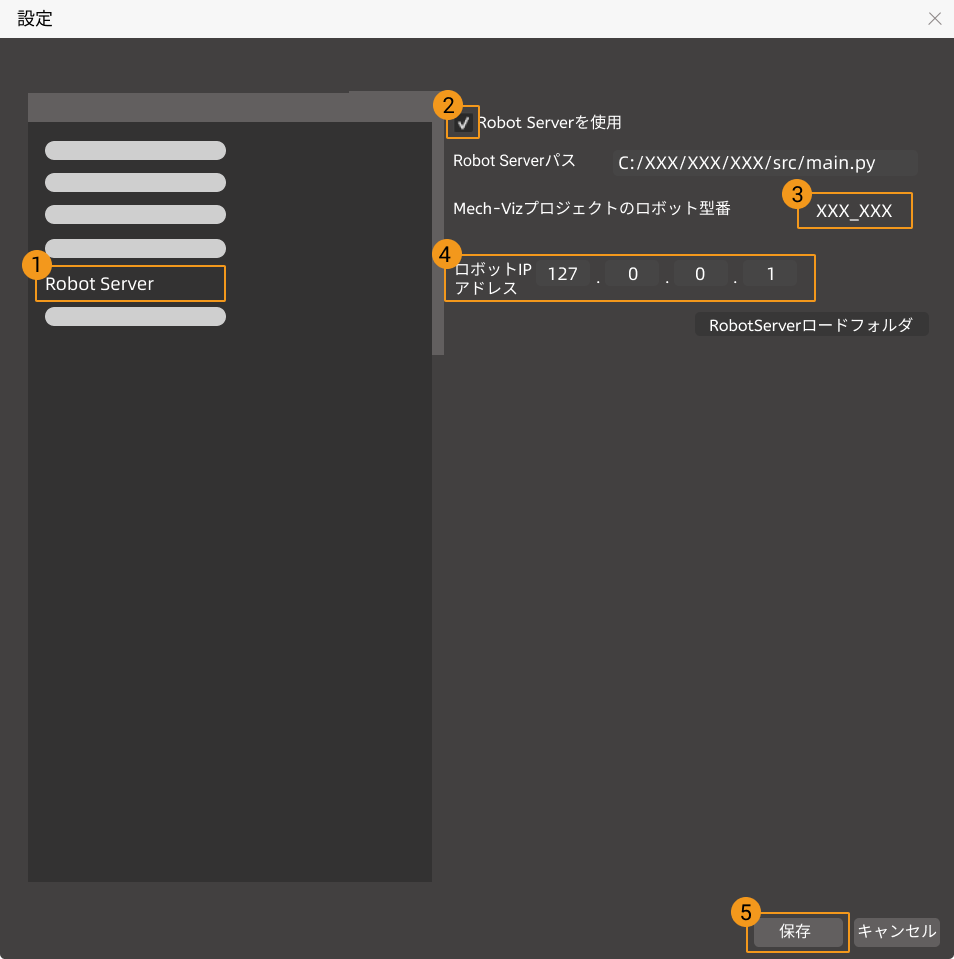
Mech-Centerを起動し、「設定」の Robot Server 画面で Robot Serverを使用 にチェックを入れます。ロボット型番がロボット実機の型番と一致していることを確認します。次に、ロボットの実際のIPアドレスを設定し、 保存 をクリックします。
ロボットを接続
-
Mech-Centerのツールバーで ロボットを制御
 をクリックします。
をクリックします。 -
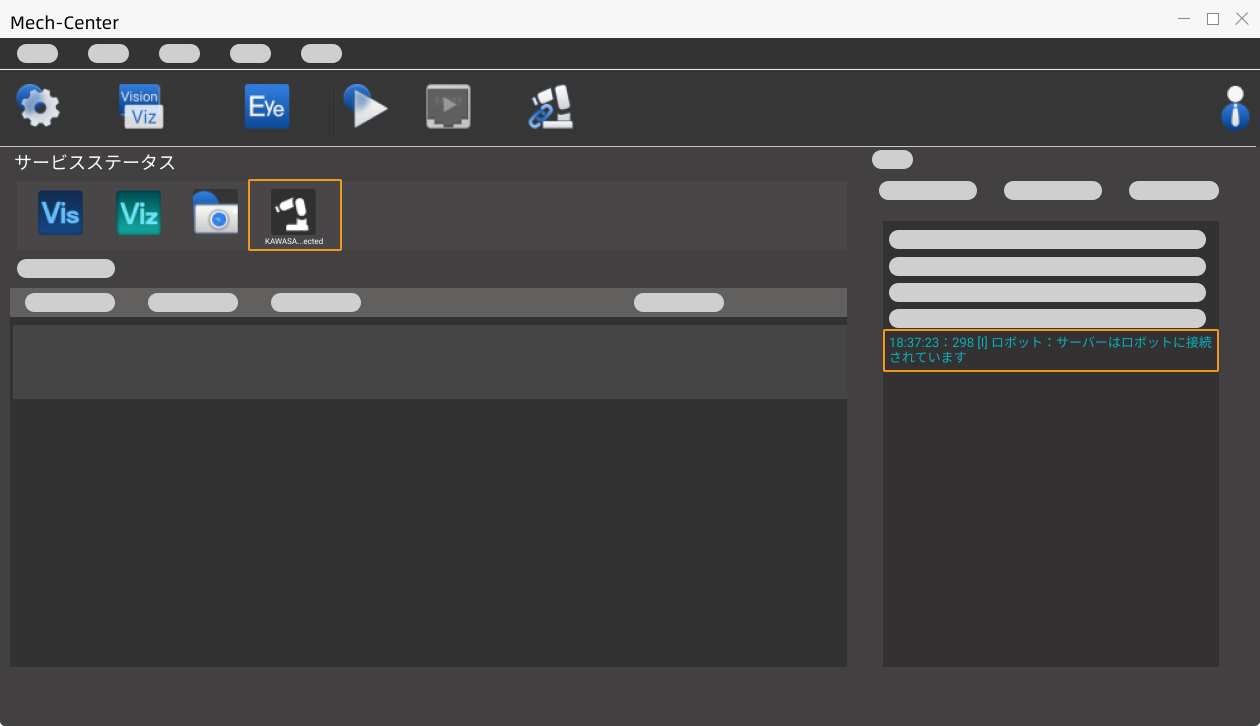
接続に成功すると、サービスステータスバーにロボットのアイコンと型番が表示され、ログバーにロボット接続成功のメッセージが出力されます。接続に失敗した場合は、前の操作が正しかったかどうか再確認してください。