読み込み手順
本節では、VizによりYASKAWAロボットをティーチングする方法について説明します。
|
YASKAWAのロボットティーチペンダント画面はシリーズによって異なります。本節では、YRC1000を使用します。 |
コントローラとソフトウェアバージョンを確認
-
コントローラ型番とロボットシステムのバージョンが以下の要件を満たしていることを確認します。
コントローラ型番 ロボットシステムのバージョン YRC1000
YAS2.94.00-00
YRC1000micro
YBS2.31.00-00
以下では、YRC1000(YAS2.94.00-00)ロボットを例として説明します。 -
機能要件:開発されたVizとの通信プログラムをロボットに読み込むには、ロボットのMotoPlusおよびイーサネット機能を有効にする必要があります。
YASKAWAロボットのシリーズによってVizティーチングのファイルも異なります。
ネットワーク接続を確立
ハードウェアの接続
YRC1000シリーズのコントローラを使用する場合、IPCのLANケーブルのもう一方の端をコントローラのCPU基板のLAN2(CN106)ポートに接続します。
|
YRC1000シリーズのコントローラについては以下の点にご注意ください。
|
IP設定
-
Main Menuキーを押したままにして電源を入れ、メンテナンスモードを開始します。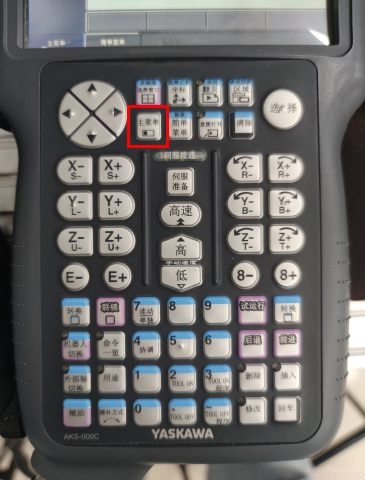
電源を入れた時に Main Menuキーを押さないと、通常モードになります。 -
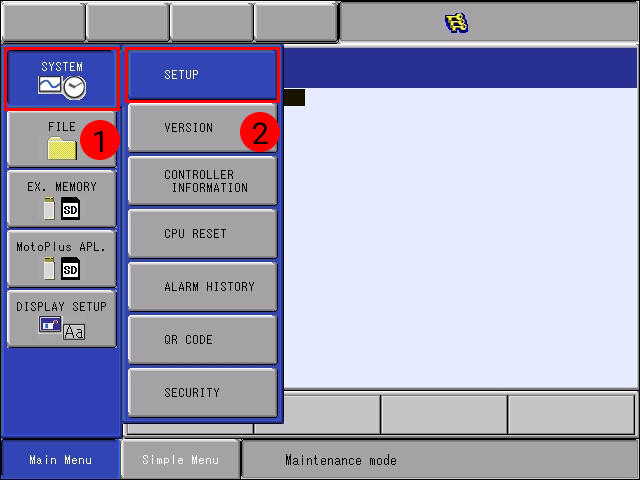
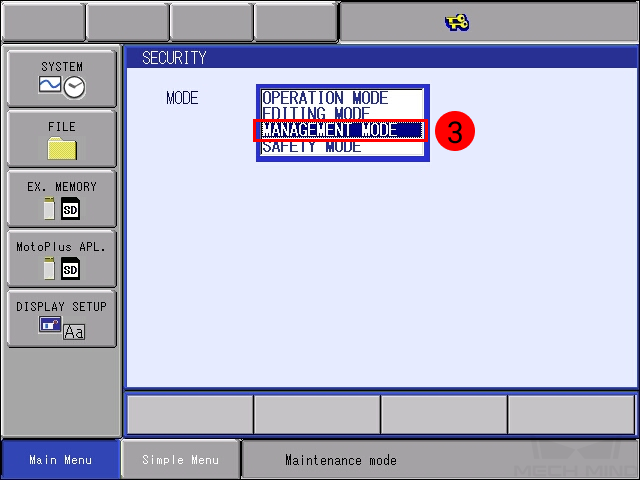
をクリックし、 MANAGEMENT MODE を選択します。
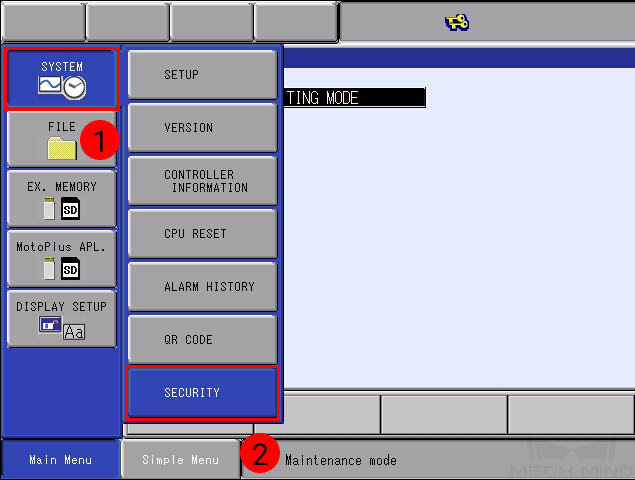
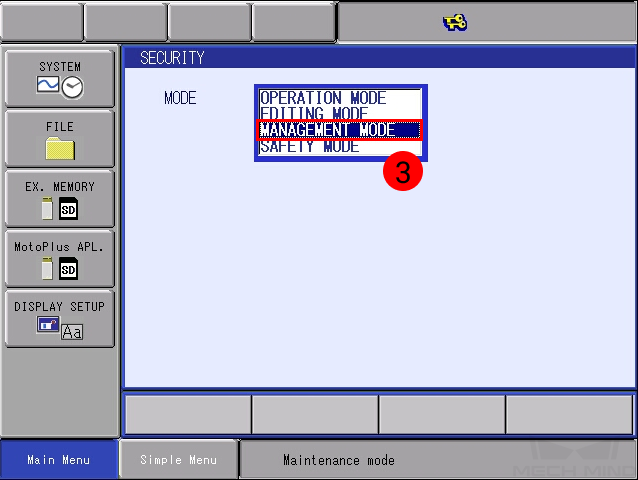
-
パスワードを入力し、 Enter をクリックして MANAGEMENT MODE になります。デフォルトのパスワードは16個の「9」です。
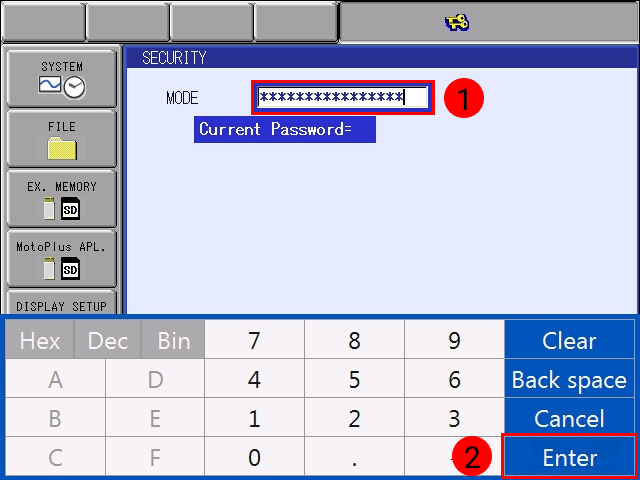

-
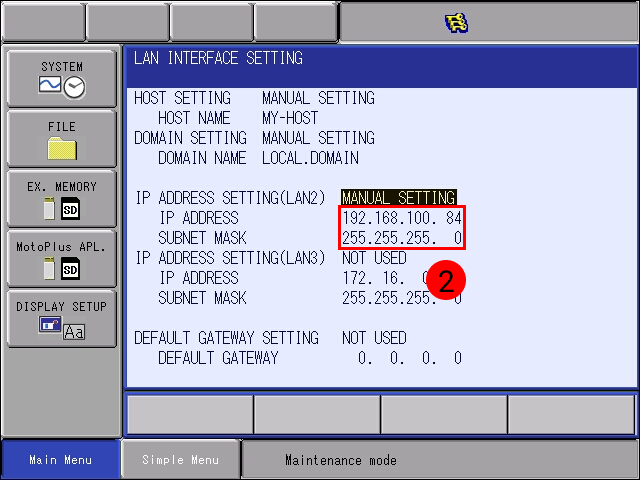
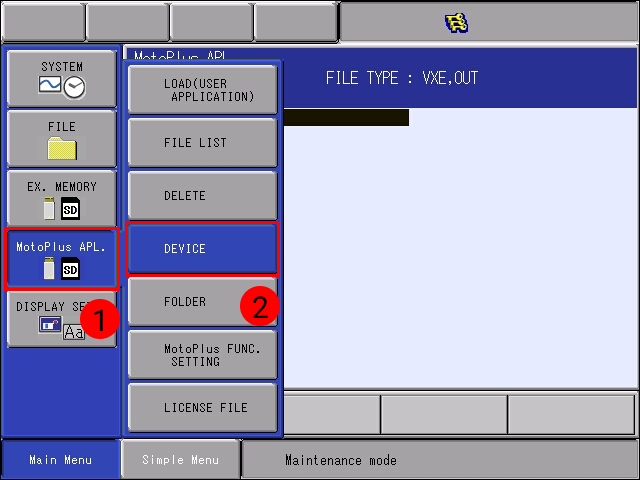
をクリックし、オプション機能の画面に入ります。次に、 LAN INTERFACE SETTING を選択してLANインターフェイスの設定画面に入ります。
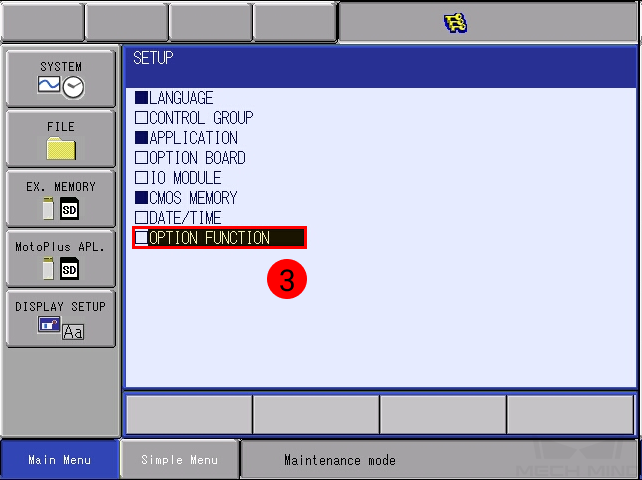

-
LAN2のIPアドレスはLAN2ポートで設定する必要があります。ドロップダウンメニューで MANUAL SETTING を選択し、 IPアドレス と サブネットマスク(サブネットマスク) を正しく設定してください。
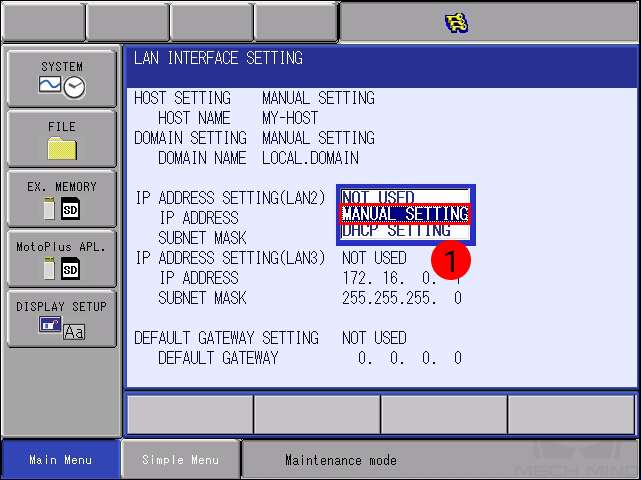
-
LAN2ポートのIPアドレスとIPCのIPアドレスは、同じネットワークセグメントにある必要があります。
-
サブネットマスクを「255.255.255.0」に設定します。
-
-
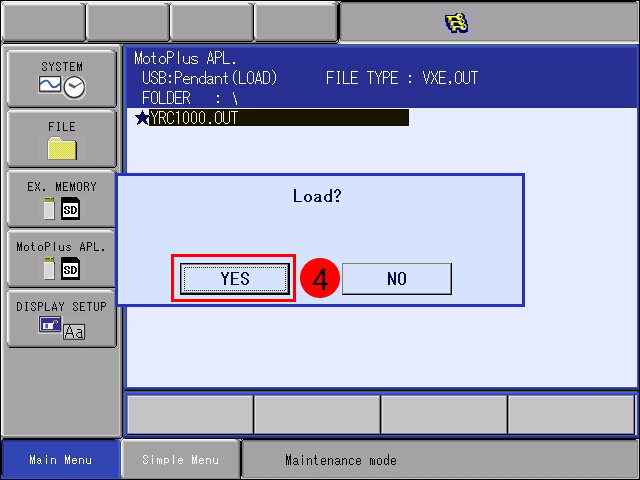
IPアドレスを変更した後、ティーチペンダントの右下隅にある
ENTERキーを押し、ポップアップウィンドウで Yes を選択します。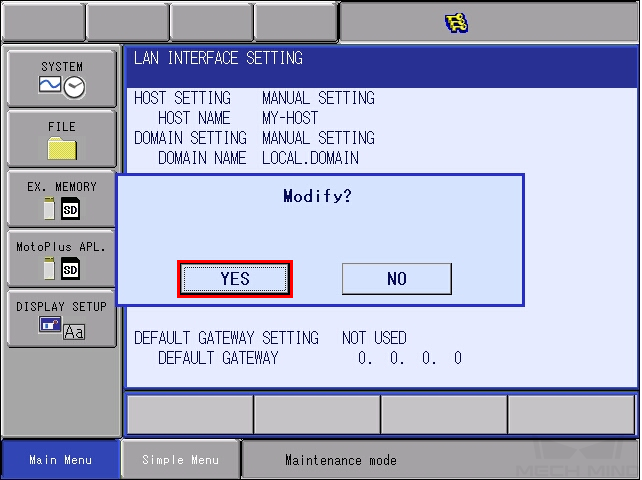
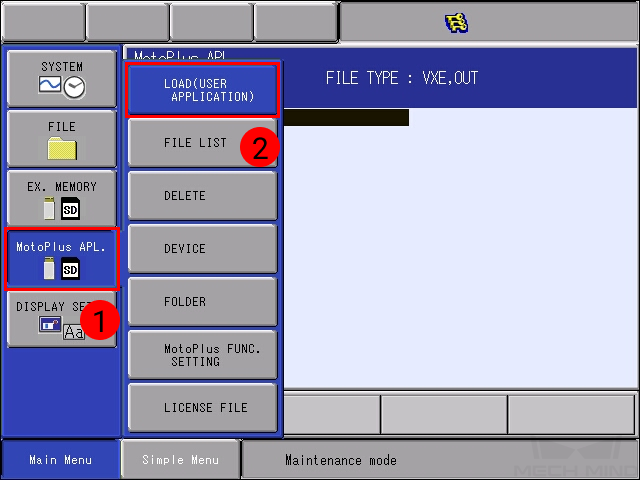
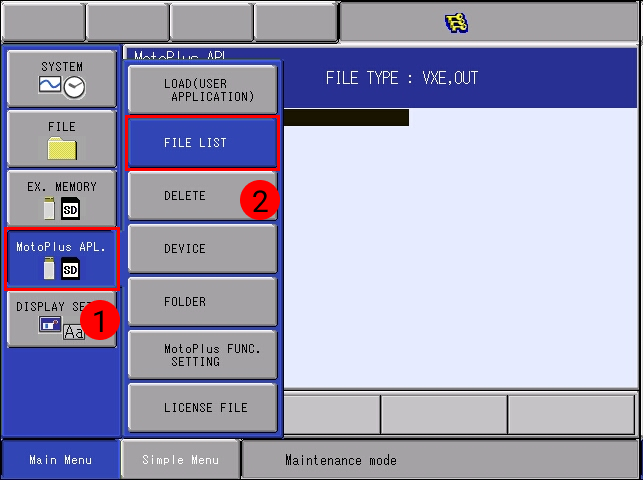
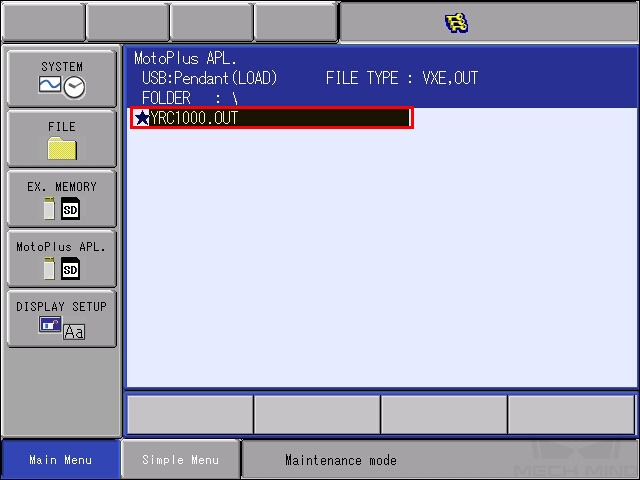
ファイルの読み込み
| ロボットプログラムを読み込む前に、フォアグラウンドプログラムをバックアップする必要がある場合、YASKAWAロボットの「取扱説明書-全般」の第7章をご参照ください。 |

ロボットの接続状態をテスト
詳細については、 ロボットの接続状態をテスト をご参照ください。
ロボットを起動すると、デフォルトの速度(100%)で速く動作します。安全性を確保するため、Mech-Vizプロジェクトを実行する前にロボットの速度を調整する必要があります。
| 速度調整などの操作は、通常モードで実行する必要があります。 |
-
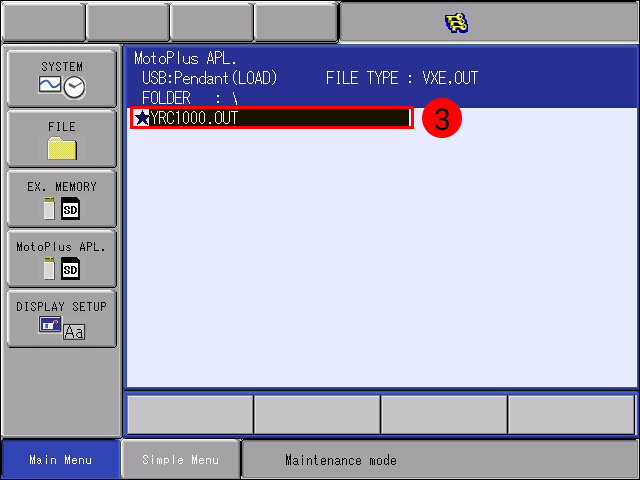
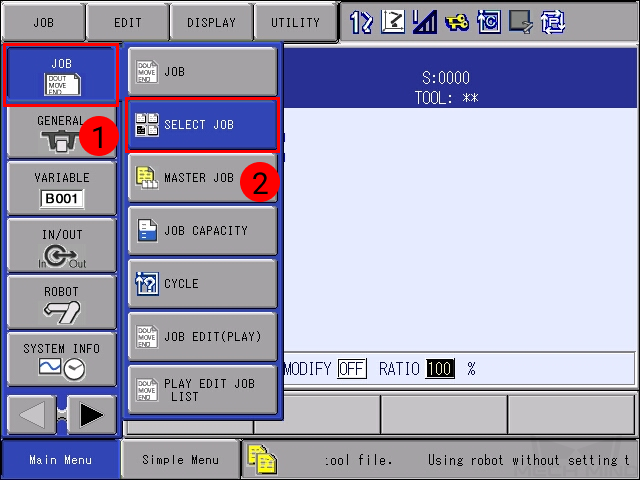
をクリックし、プログラム一覧の画面に入ります。
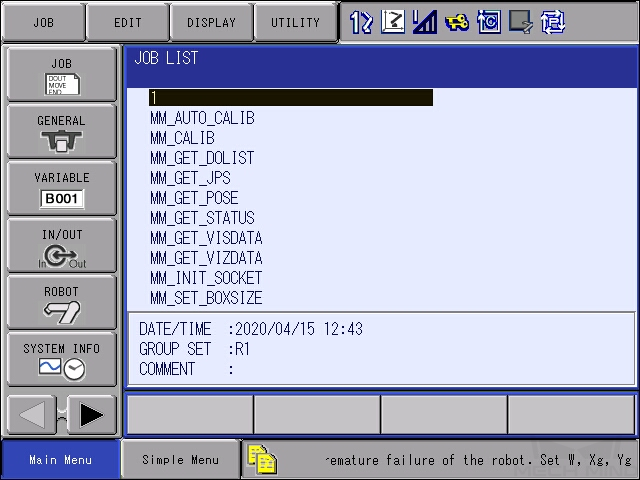
-
プログラムを選択した後、ティーチペンダントの
SELECTボタンを押して、以下のような画面に入ります。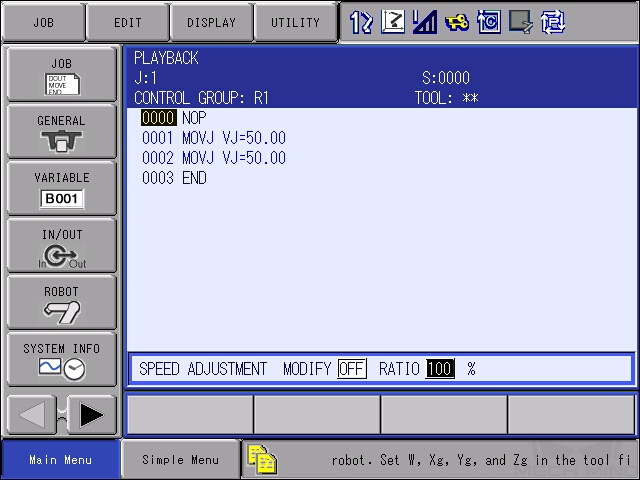
-
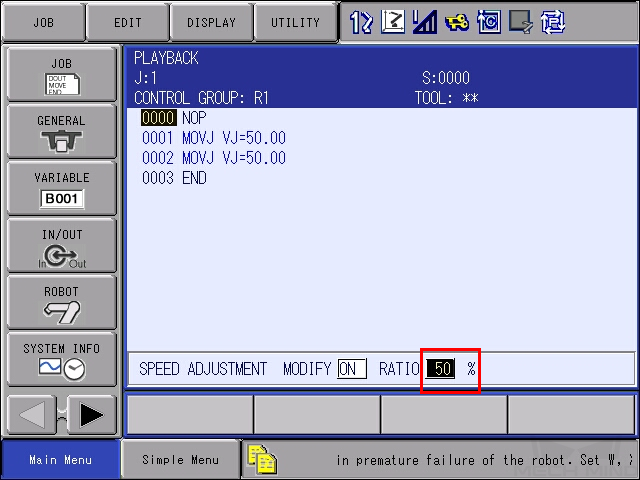
次に、 をクリックして速度調整の画面に入った後、下部にある SPEED ADJUSTMENT を選択します。


下部にある SPEED ADJUSTMENT が選択されていない場合、その中のパラメータは変更できません。 -
SPEED ADJUSTMENT で OFF を選択し、ティーチペンダントの
SELECTボタンを押して ON に切り替えます。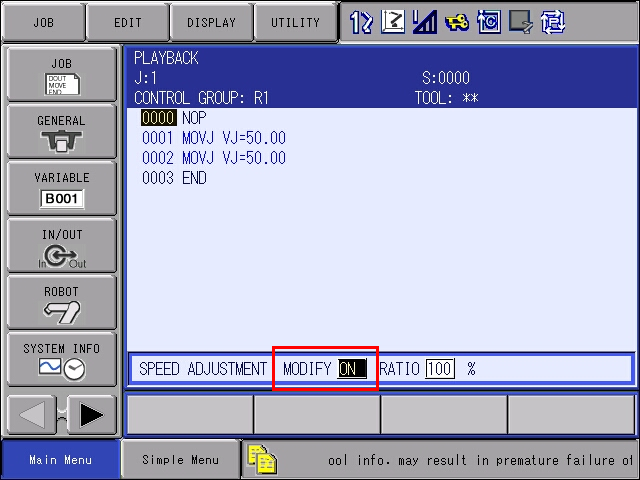
NOTE: OFF を ON に切り替えずに、速度を調整することはできません。
-
同様に、「RATIO」の後の数値を選択し、ティーチペンダントの
SELECTボタンを押して、速度値調整の画面に入ります。値を入力した後、ティーチペンダントのEnterボタンを押して、速度の調整は完了します。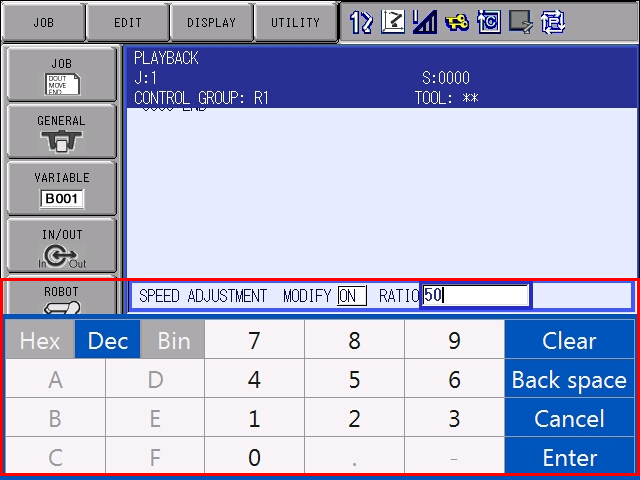
-
上記に従って速度調整が完了した後、下図のような画面が表示されます。