自動キャリブレーション
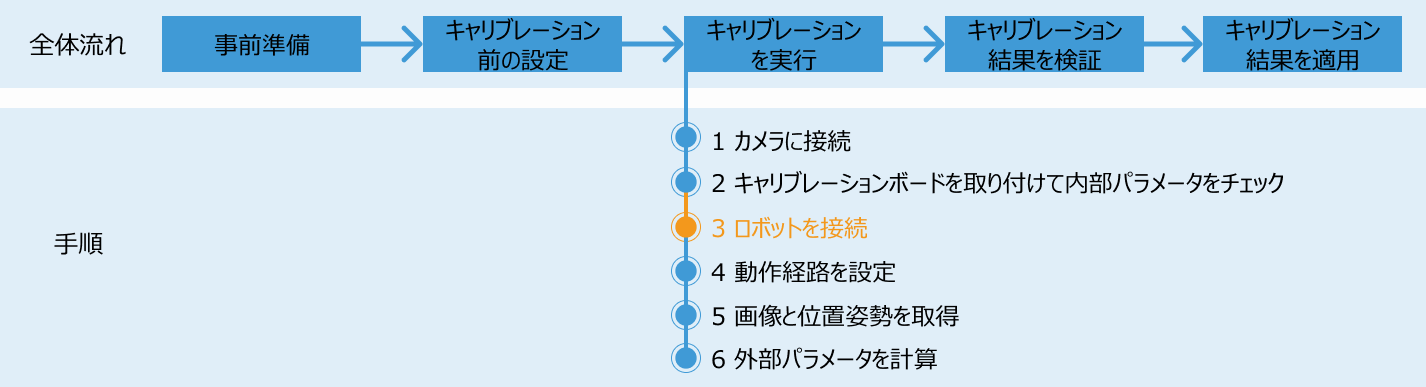
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
1. キャリブレーションプログラムの選択と変更
-
ティーチペンダントのスイッチをONにし、コントローラのスイッチをT1またはT2にすると、ロボットは手動モードに切り替えられます。
T1は低速モード、T2は高速モードです。初心者にはT1モードの使用をお勧めします。 

-
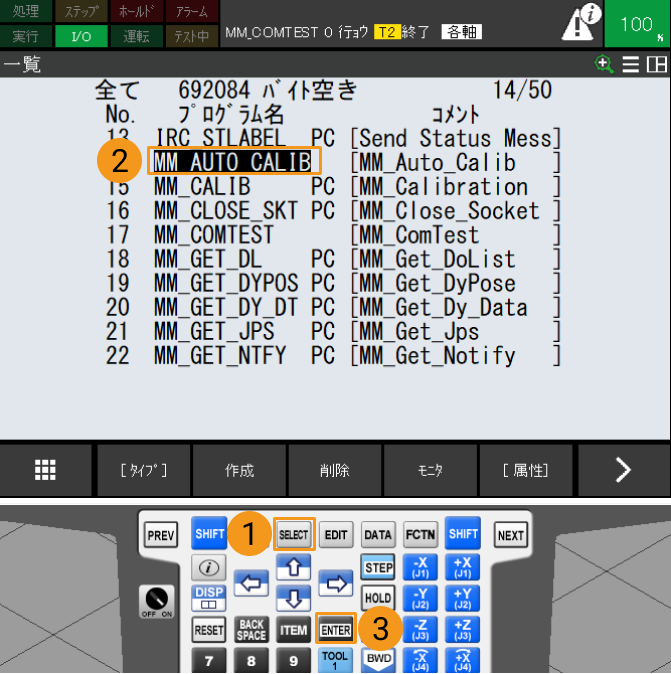
ティーチペンダントの SELECT キーを押し、プログラム選択画面に入ります。矢印キーで MM_AUTO_CALIB プログラムを選択し、ENTER キーを押してプログラムファイルを開きます。
-
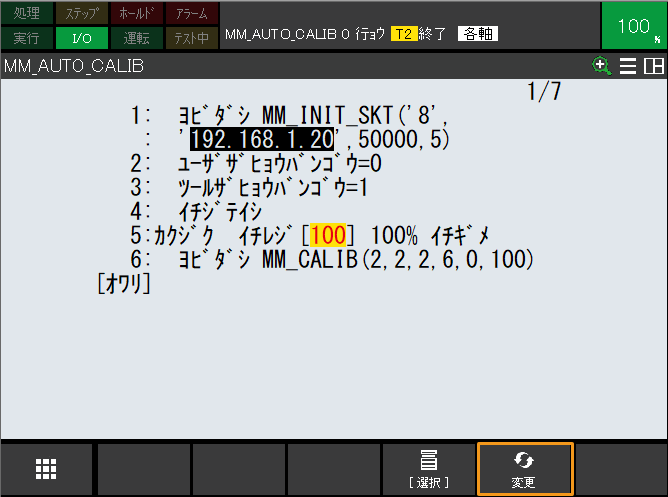
MM_AUTO_CALIBのプログラム画面で CALL MM_INIT_SKT のパラメータを設定します。このコマンドは4つのパラメータがあります。矢印キーでいずれかのパラメータを選択し、F5(変更 を選択)を押して設定します。実際の状況に応じて設定する必要があります。
-
パラメータ1:ロボットのポート番号(ロボットポート番号1~8のいずれかを選択してください)。
-
パラメータ2:IPCのIPアドレス。
-
パラメータ3:IPCのサーバーポート番号(Mech-Visionで設定されたホストIPのポート番号と一致する必要があります)。
-
パラメータ4:タイムアウト待ち時間(min単位)。
-
2.キャリブレーションの初期位置を設定
-
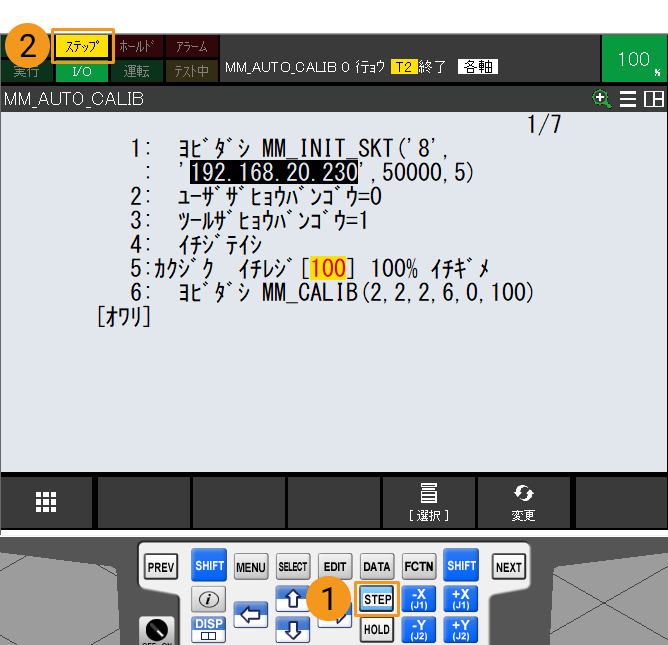
プログラムを開いた後、STEP キーを押してロボットをステップモードに切り替えると、ティーチペンダントの画面上部にある ステップ が黄色に変わります。
-
ティーチペンダントの背面にあるイネーブルスイッチを押します(どちらでもかまいません)。手動でロボットをキャリブレーションの初期位置に移動させます。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。

-
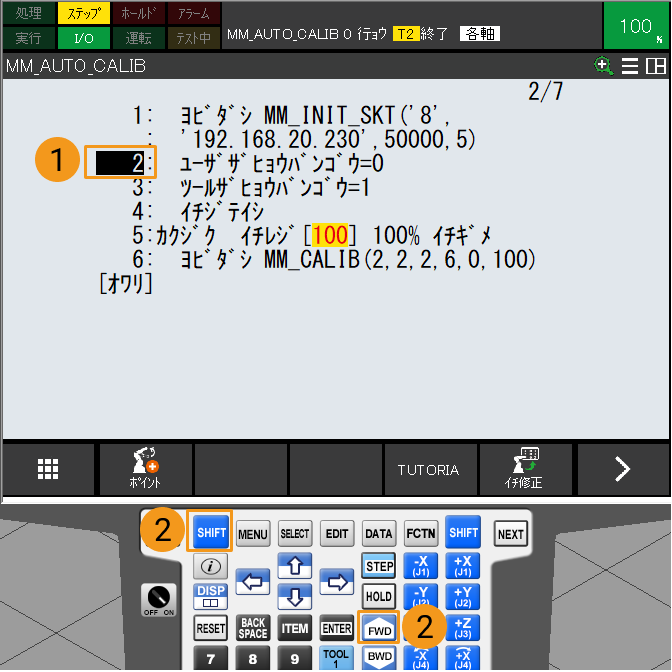
矢印キーでカーソルを2行目のコマンドに移動させ、SHIFT と FWD を同時に押しながら2行目のコマンドを実行し、ユーザー座標系0が使用されていることを示します。
-
矢印キーでカーソルを3行目のコマンドに移動させ、SHIFT と FWD を同時に押しながら3行目のコマンドを実行し、ツール座標系1が使用されていることを示します。

-
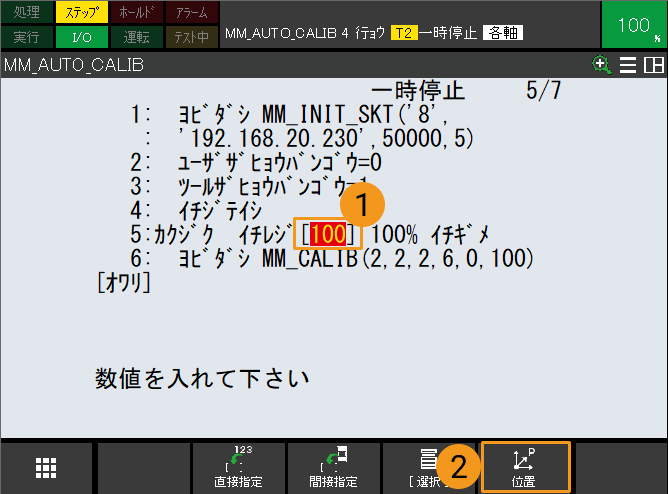
矢印キーで [100] を選択し、F5 キー(位置 を選択)を押して、F5 キー(形式 を選択)をもう一度押します。その後、矢印キーで 直交 を選択し、ENTER キーを押します。

-
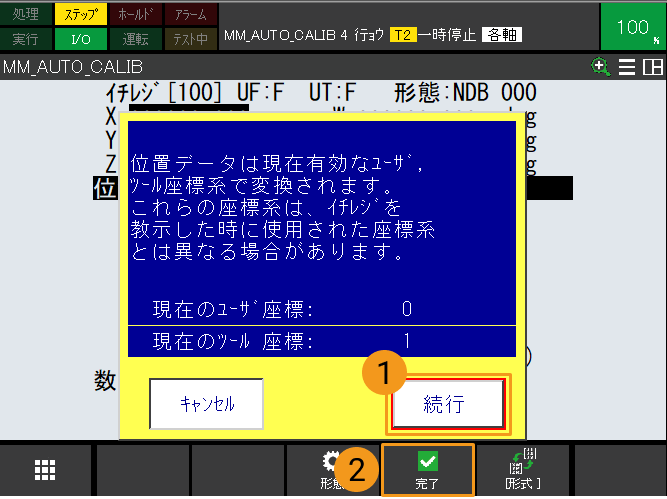
下図のような画面で、矢印キーで 続行 を選択し、F4 キー(完了 を選択)を押します。
-
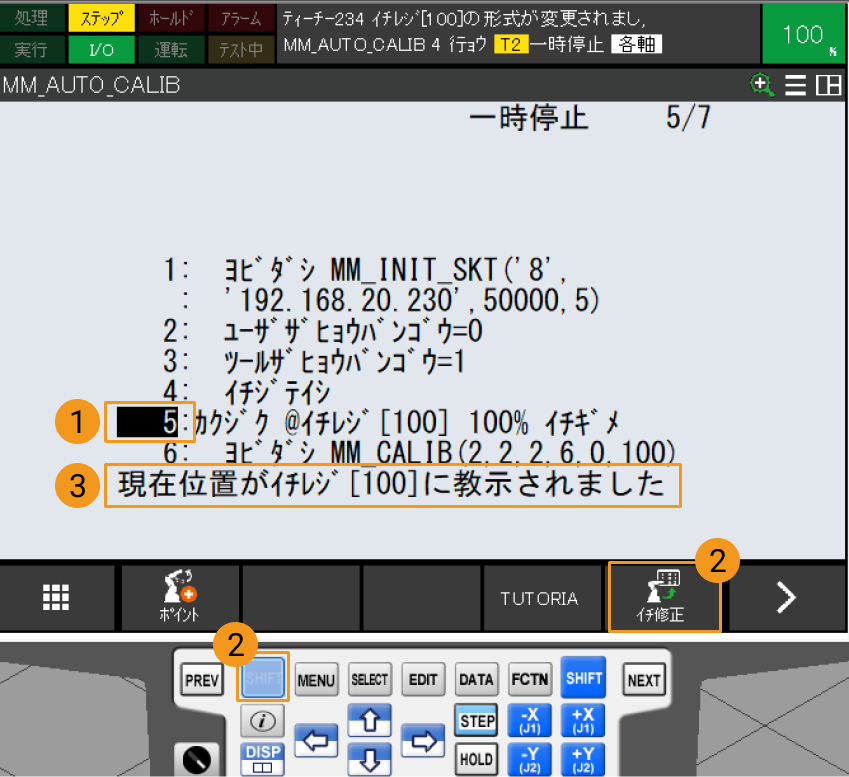
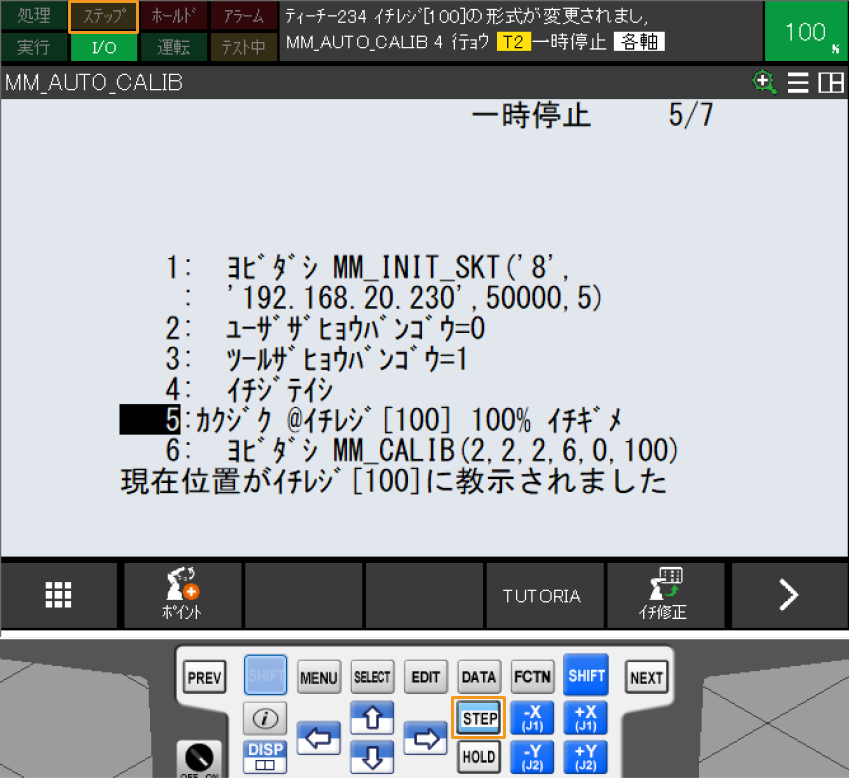
矢印キーで5行目のコマンドの先頭を選択し、ティーチペンダントの SHIFT と F5 キー(イチ修正 を選択) を同時に押すと、ティーチペンダントで「現在位置がイチレジ[100]に教示されました」というメッセージが表示されます。この時点で、ロボットの現在の位置姿勢がPR[100]に保存されます。
-
STEP キーを押し、ティーチペンダントの左上が示している ステップ がグレーに変わり、ステップモードを終了します。
3. キャリブレーションプログラムを実行
-
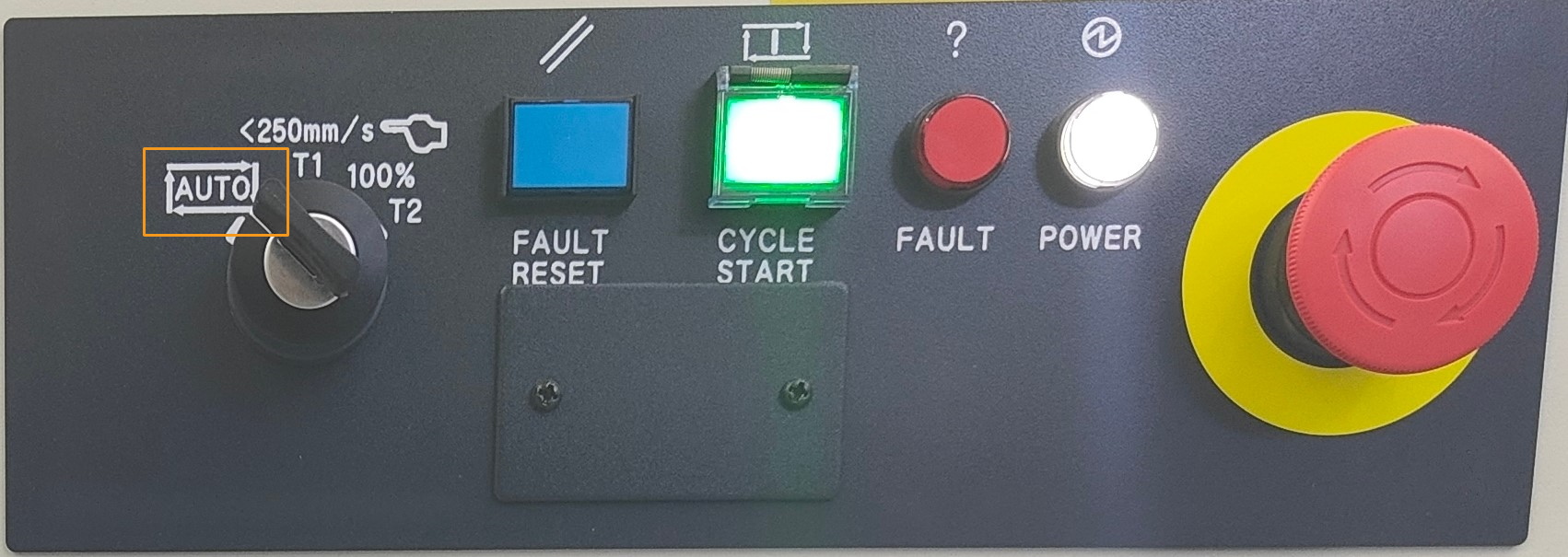
ティーチペンダントのスイッチをOFFにし、コントローラのスイッチをAUTOにすると、ロボットは自動モードに切り替えられます。

-
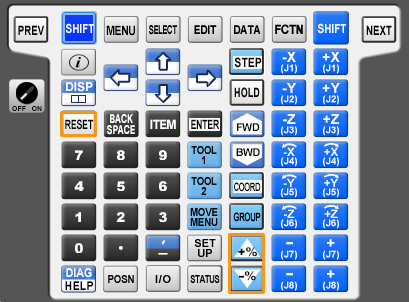
ティーチペンダントの RESET を押してすべてのアラームを解除します。次に、+% と -% を使用してロボットの速度を10%から20%の範囲に調整します。
-
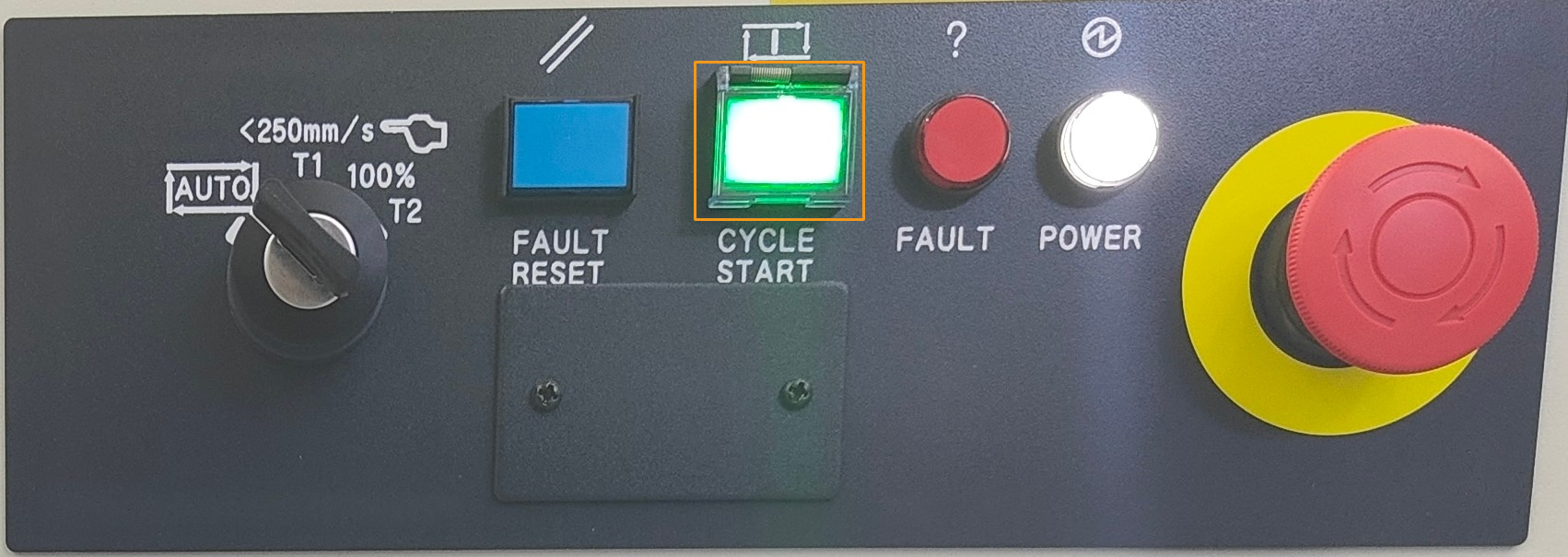
コントローラでの緑のボタンを押すと、キャリブレーションプログラムが自動的に実行されます。
-
Mech-Visionの キャリブレーション 画面では、ロボットを接続 の下に「接続済み」の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、次へ をクリックします。
-
次に、キャリブレーションを実行 の4番目の手順(動作経路を設定)および残りの設定を実行します。以下の内容をご参照ください。