Adapterの概要
Adapterについて
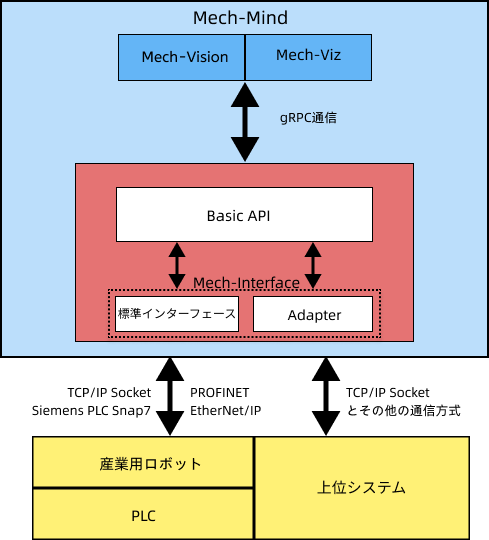
AdapterはMech-VisionおよびMech-Vizソフトウェアの通信コンポーネントとして機能します。Basic APIインターフェースを介してMech-VisionおよびMech-VizとのgRPC通信を行います。また、外部機器との間では、TCP/IP Socket、HTTPおよびPLCプロトコル(三菱 PLC MCプロトコルなど)の様々な一般的な産業用通信方式を使用して通信を行います。
Adapterの機能
Adapterは次の機能に対応します。
-
内部でMech-VisionおよびMech-Vizの制御を実現しています。
タイプ 機能 Mech-Vision関連
Mech-Visionプロジェクトを実行してビジョン結果を取得
Mech-Visionステップパラメータを設定
Mech-Visionステップパラメータを読み取る
Mech-Visionパラメータレシピを切り替る
Mech-Viz関連
Mech-Vizプロジェクトを起動
Mech-Vizプロジェクトを停止
Mech-Vizステップパラメータを設定
Mech-Vizステップパラメータを読み取る
ロボットハンドの番号を設定
ロボットの動作速度を設定
点群衝突検出のパラメータを設定
Mech-Vizの実行ステータスを取得して返す
-
外部で、ユーザーインターフェース、データベース、ファイルの読み書き、Webシステムとの通信などのビジョン以外の機能を実現しています。
外部の機能を実現するためには、Pythonプログラミングを使用して開発する必要があります。
Adapterの開発
Mech-Visionは Adapterプロジェクトの生成ツール を提供しており、Adapterに初めて使用するユーザーが迅速にAdapterプロジェクトを生成し、Adapterプロジェクトを構築するのに役立ちます。dapterプロジェクトの生成ツールの使用方法については、Adapterプロジェクトの生成ツール をご参照ください。
ユーザーは生成されたAdapterを基にしてプロジェクトをカスタイズすることもできますし、ゼロからAdapterプロジェクトを作成することもできます。
Adapterプロジェクトの設定
Adapterプロジェクトを作成したら、以下の手順に従ってAdapterプロジェクトを設定できます。
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択し、 次へ をクリックします。
-
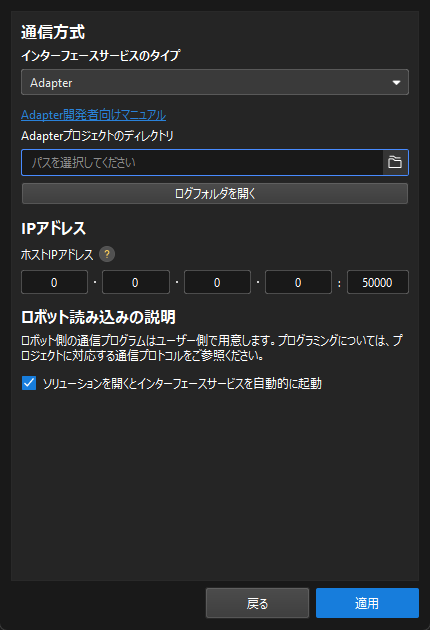
インターフェイスサービスのタイプ を Adapter に設定します。
-
Adapterプロジェクトのディレクトリ の下の
 をクリックします。ポップアップ表示されたファイルブラウザでAdapterプロジェクトを選択します。
をクリックします。ポップアップ表示されたファイルブラウザでAdapterプロジェクトを選択します。 -
(オプション) ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-
-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
これで、Adapterプロジェクトの設定が完了しました。
Adapterを簡単に理解したら、Adapterプロジェクトの生成ツール を参照して、最初のAdapterプロジェクトをすばやく生成できます。