サンプルプログラム15:MM_S15_Viz_GetDoList
プログラム概要
機能 |
ロボットが把持経路とDO信号を取得した後、ループで把持点に移動してDO信号を設定し、把持および配置を実行します。通常、ロボットハンドが複数のブロック吸盤を使用するデパレタイジングシーンに適しています。 |
||
ファイル場所 |
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある
|
||
必要なプロジェクト |
Mech-VisionとMech-Vizプロジェクト(ロボットハンド種類がデパレタイズ用吸盤である必要があります) |
||
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
以下はMM_S15_Viz_GetDoListサンプルプログラムのコードと関連する説明です。
| このサンプルは、MM_S2_Viz_Basicサンプルに比べて、太字部分のコードのみが追加されています。そのため、MM_S2_Viz_Basicサンプルと同じ部分のコードについては、以下で再度説明することはありません(詳細は MM_S2_Viz_Basicサンプルの説明 をご参照ください)。 |
MODULE MM_S15_Viz_GetDoList
!----------------------------------------------------------
! FUNCTION: trigger Mech-Viz project, then get planned path
! and gripper control signal using command 210
! Mech-Mind, 2023-12-25
!----------------------------------------------------------
!define local num variables
LOCAL VAR num pose_num:=0;
LOCAL VAR num status:=0;
LOCAL VAR num vis_pose_num:=0;
LOCAL VAR num count:=0;
LOCAL VAR num movetype{5}:=[0,0,0,0,0];
LOCAL VAR num toolnum{5}:=[0,0,0,0,0];
LOCAL VAR num speed{5}:=[0,0,0,0,0];
!define local joint&pose variables
LOCAL CONST jointtarget home:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL CONST jointtarget snap_jps:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget camera_capture:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL VAR robtarget pickpoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL VAR robtarget drop_waypoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL VAR robtarget drop:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS jointtarget jps{5}:=
[
[[1.1835,39.2938,-17.0883,0.1382,67.7901,176.701],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[1.2008,45.8522,-13.6729,0.1512,57.8163,176.689],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[1.1835,39.2938,-17.0883,0.1382,67.7901,176.701],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[36.2634,-36.6956,48.5019,-1.0197,78.1304,356.473],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]
];
!define local tooldata variables
LOCAL PERS tooldata gripper1:=[TRUE,[[0,0,0],[1,0,0,0]],[0.001,[0,0,0.001],[1,0,0,0],0,0,0]];
PROC Sample_15()
!set the acceleration parameters
AccSet 50, 50;
!set the velocity parameters
VelSet 50, 1000;
!move to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
!initialize communication parameters (initialization is required only once)
MM_Init_Socket "127.0.0.1",50000,300;
!move to image-capturing position
MoveL camera_capture,v1000,fine,gripper1;
!open socket connection
MM_Open_Socket;
!trigger Mech-Viz project
MM_Start_Viz 2,snap_jps;
!get planned path
MM_Get_PlanData 0, 3, pose_num, vis_pose_num, status;
!check whether planned path has been got from Mech-Viz successfully
IF status <> 2100 THEN
!add error handling logic here according to different error codes
!e.g.: status=2038 means no point cloud in ROI
Stop;
ENDIF
!get gripper control signal list
MM_Get_Dolist 0,0;
!close socket connection
MM_Close_Socket;
!save waypoints of the planned path to local variables one by one
FOR i FROM 1 TO pose_num DO
count:=i;
MM_Get_PlanJps count,3,JPS{count},movetype{count},toolnum{count},speed{count};
ENDFOR
!follow the planned path to pick
FOR j FROM 1 TO pose_num DO
count:=j;
MoveAbsJ jps{count},v1000,fine,gripper1;
!set gripper control signal when current waypoint is picking waypoint
IF count=vis_pose_num THEN
!add object grasping logic here
Stop;
!set gripper control signal
!MM_Set_DoList 0, 1, go16_1;
!MM_Set_DoList 0, 2, go16_2;
!MM_Set_DoList 0, 3, go16_3;
!MM_Set_DoList 0, 4, go16_4;
ENDIF
ENDFOR
!move to intermediate waypoint of placing
MoveJ drop_waypoint,v1000,z50,gripper1;
!move to approach waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move to placing waypoint
MoveL drop,v300,fine,gripper1;
!add object releasing logic here, such as "setdo DO_1, 0;"
Stop;
!move to departure waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move back to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
ENDPROC
ENDMODULE上記のサンプルプログラムの処理流れは、下図の通りです。
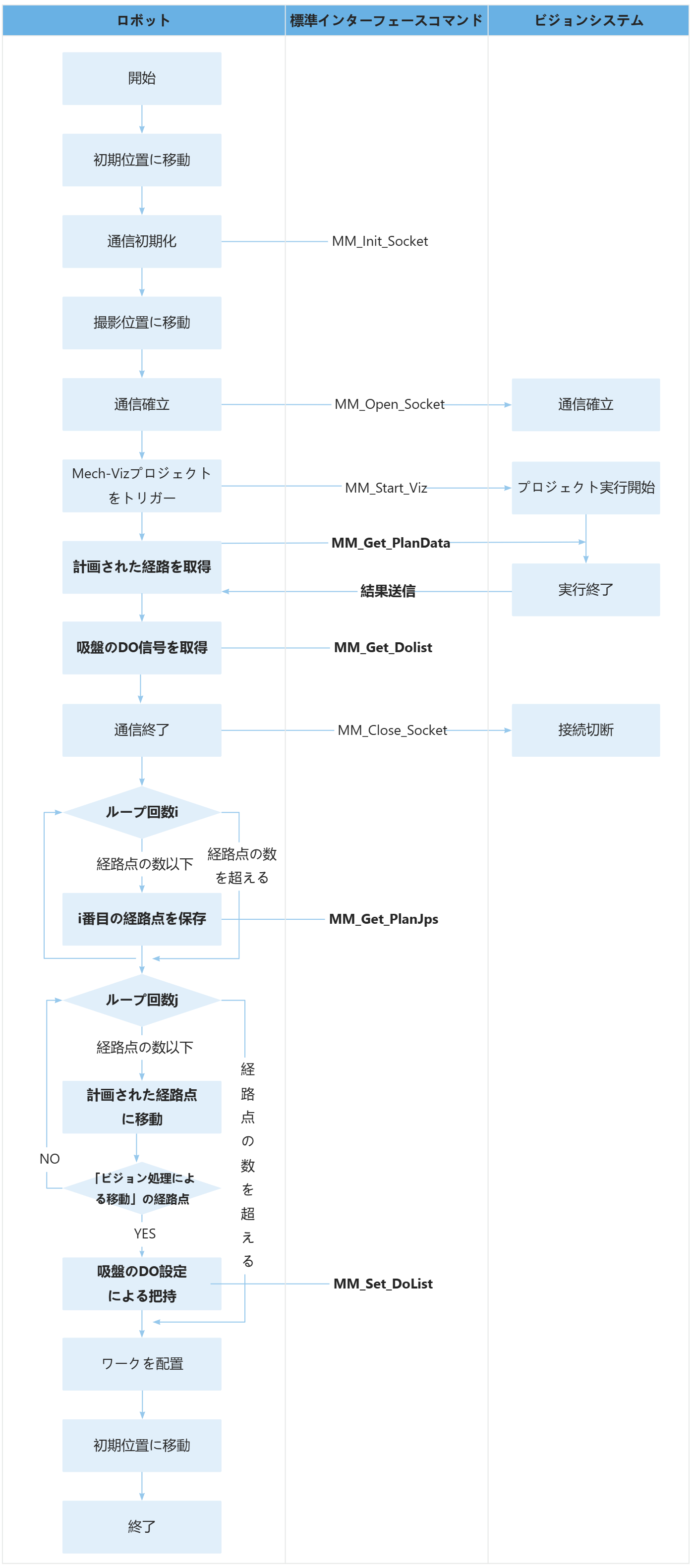
下表は太字部分のコードとその説明です。コマンド名のリンクをクリックすることで、その詳細を確認できます。
| 処理流れ | コートと説明 |
|---|---|
計画された経路を取得 |
|
吸盤のDO信号を取得 |
|
ループで計画された経路を保存 |
|
ループで把持を実行 |
|