標準インターフェース通信設定
以下では、DENSOロボットの標準インターフェース通信の設定手順について説明します。
事前準備
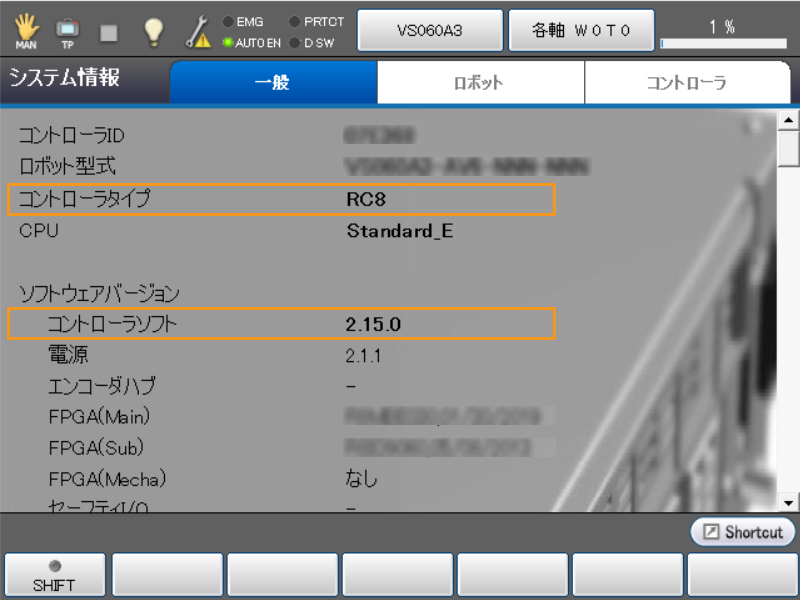
ハードウェアとソフトウェアのバージョンを確認
-
ロボット型式:6軸ロボット
-
コントローラタイプ:RC8
-
コントローラのソフトウェアバージョン:2.15.0
(クリックして展開)詳細方法
-
ティーチペンダントの を選択します。

-
コントローラタイプ および コントローラソフト を確認します。
-
ネットワーク接続を確立
-
IPCのLANケーブルのもう一端をコントローラのLANポートに差し込みます。
-
ロボットのIPアドレスが、IPCのIPアドレスと同じネットワークセグメントにあることを確認します。
(クリックして展開)詳細方法
-
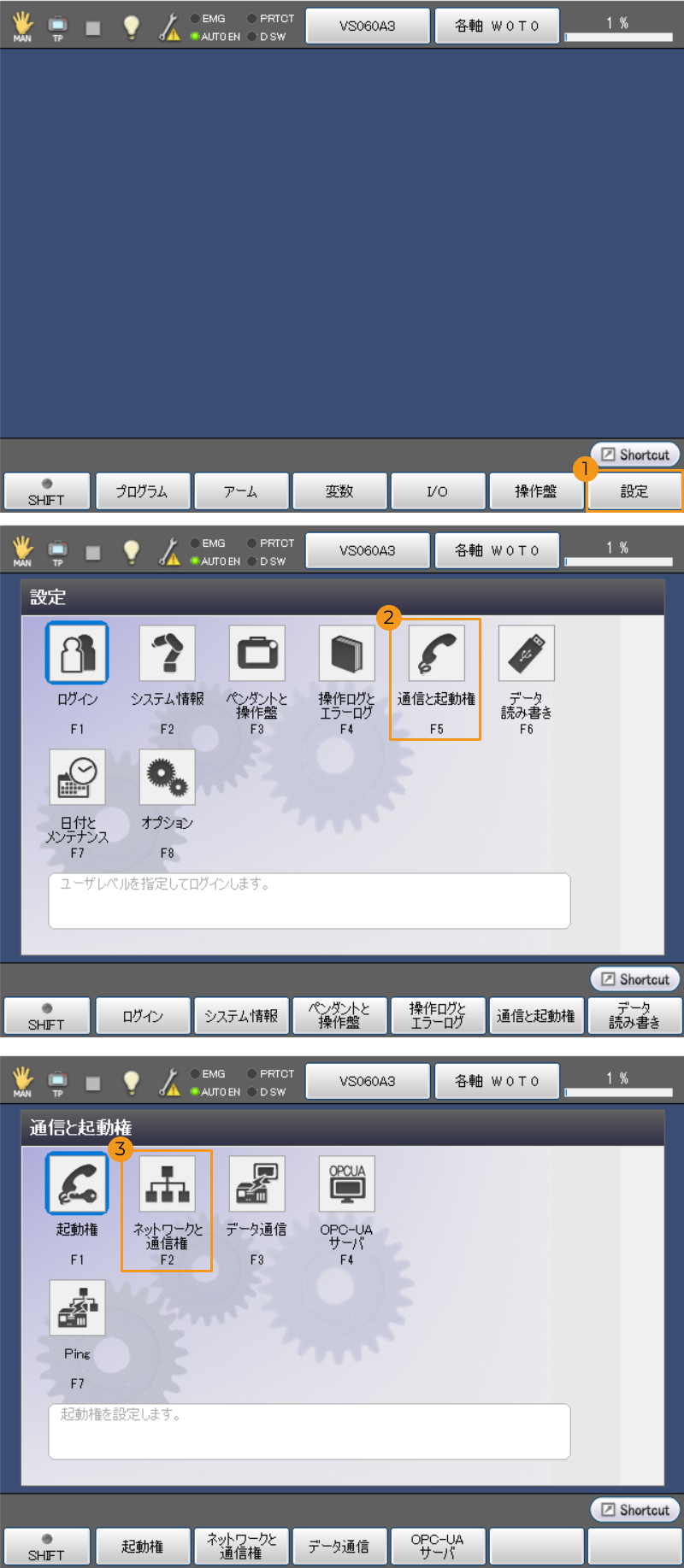
ティーチペンダントパネルの を選択します。
-
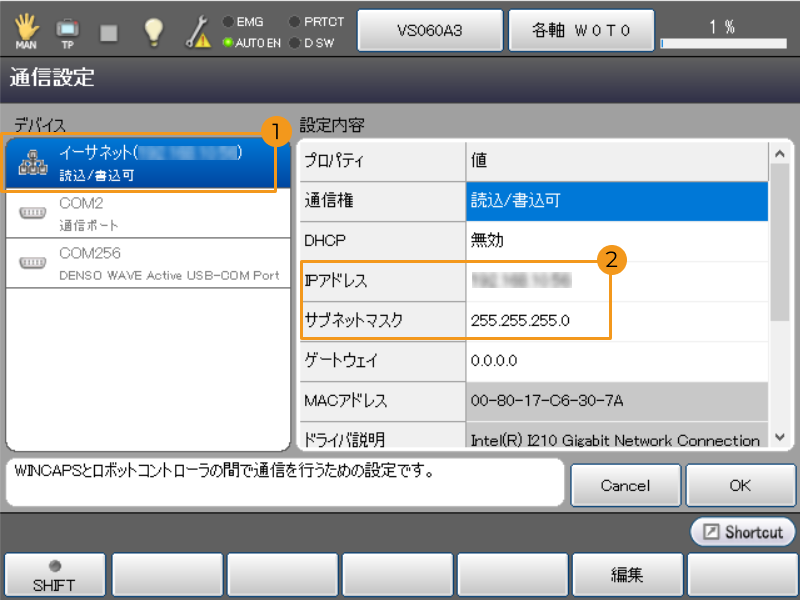
「通信設定」画面の「デバイス」パネルで イーサネット を選択し、「設定内容」パネルで IPアドレス および サブネットマスク を確認します。また、ロボットのIPアドレスがIPCのIPアドレスが同じネットワークセグメントにあることを確認します。
-
ロボットのIPアドレスがIPCのIPアドレスが同じネットワークセグメントにない場合は、IPCのIPアドレスを変更してください。
-
IPCのIPアドレスを入力
-
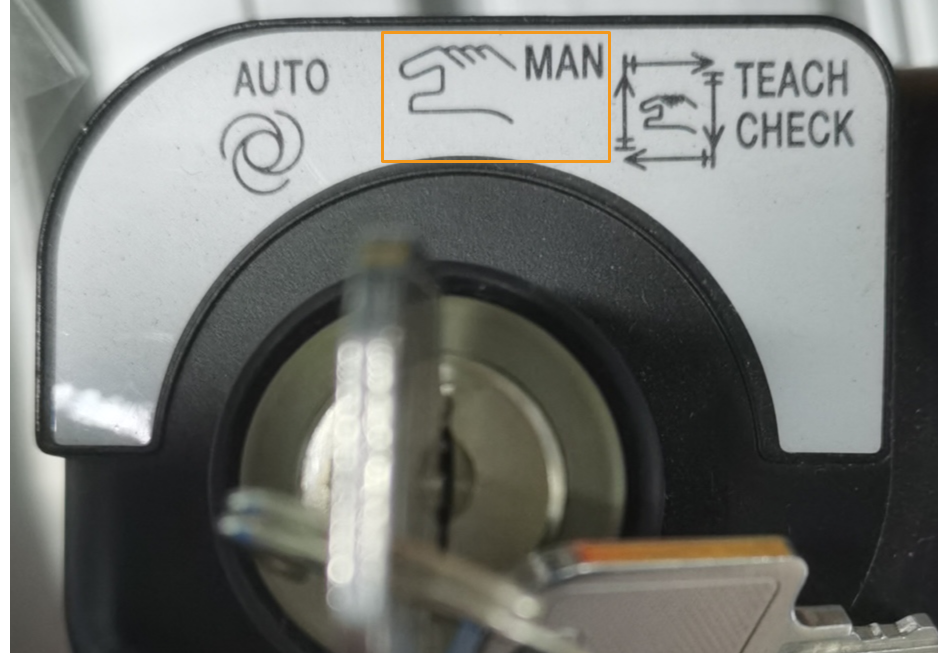
ティーチペンダントのスイッチを回し、MAN(手動モード) を指すようにします。
-
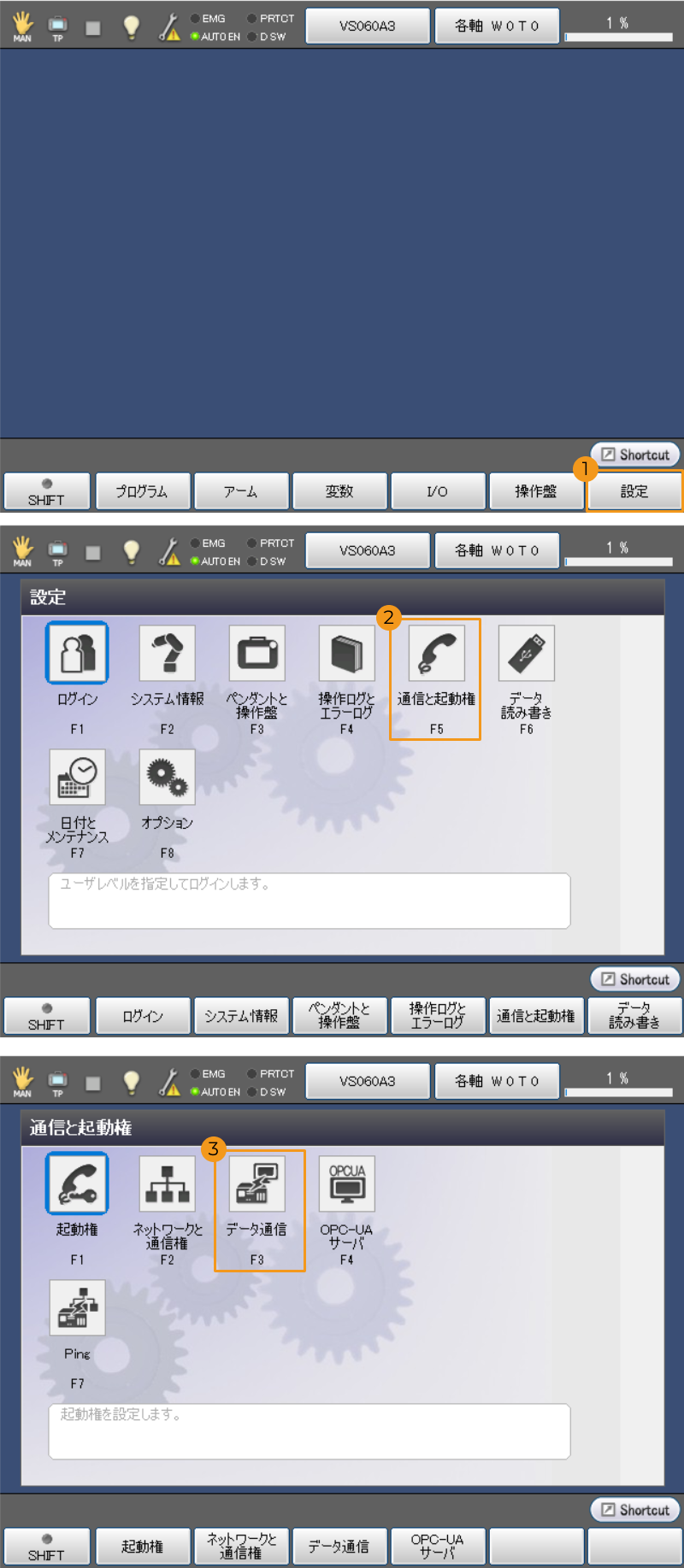
ティーチペンダントパネルの を選択します。
-
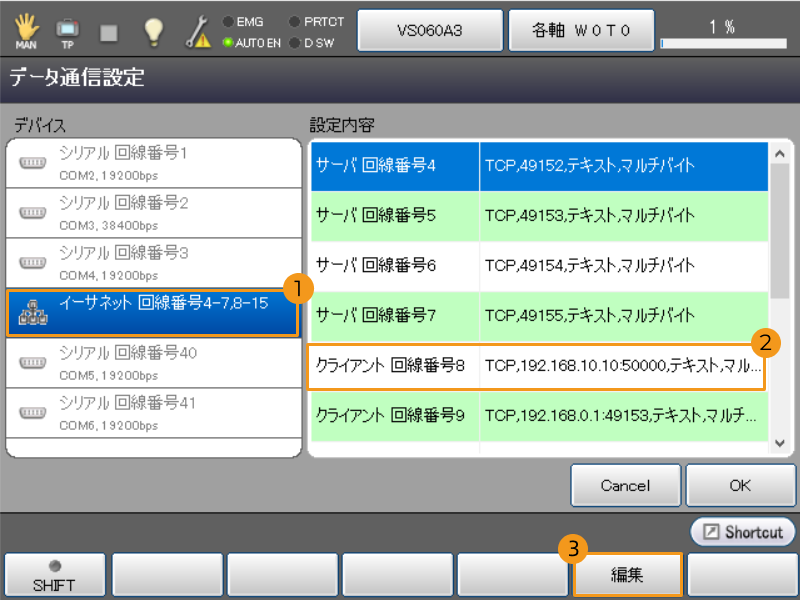
「データ通信設定」画面の「デバイス」パネルで イーサネット 回線番号4-7,8-15 を選択し、「設定内容」パネルで クライアント 回線番号8 を選択します。編集 をタッチします。
-
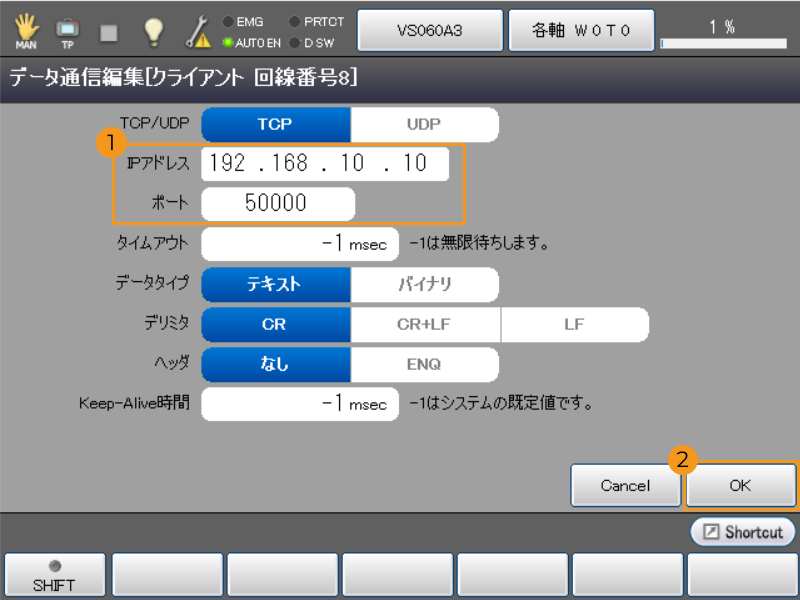
表示される画面で IPアドレス をIPCのIPアドレスに変更し、ポート がMech-Visionの「ロボット通信設定」で設定されたポート番号と一致するようにに変更します。OK をタッチします。
バックアップ
-
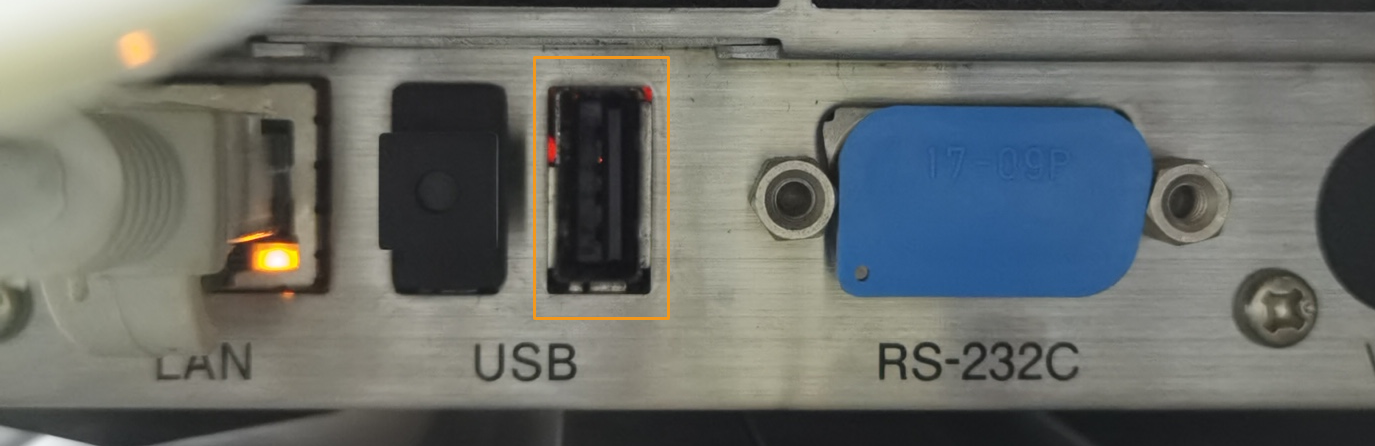
USBメモリをコントローラに差し込みます。
-
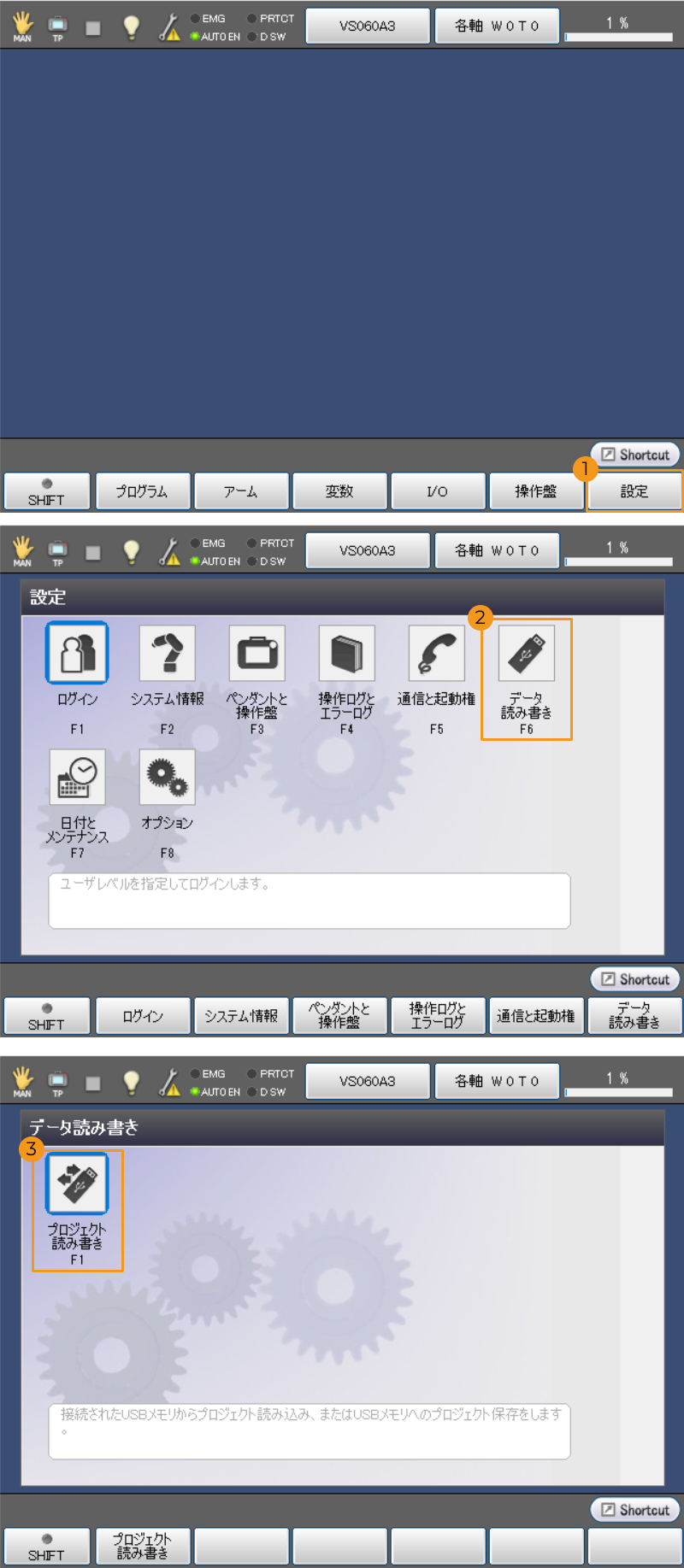
ティーチペンダントパネルの を選択します。
-
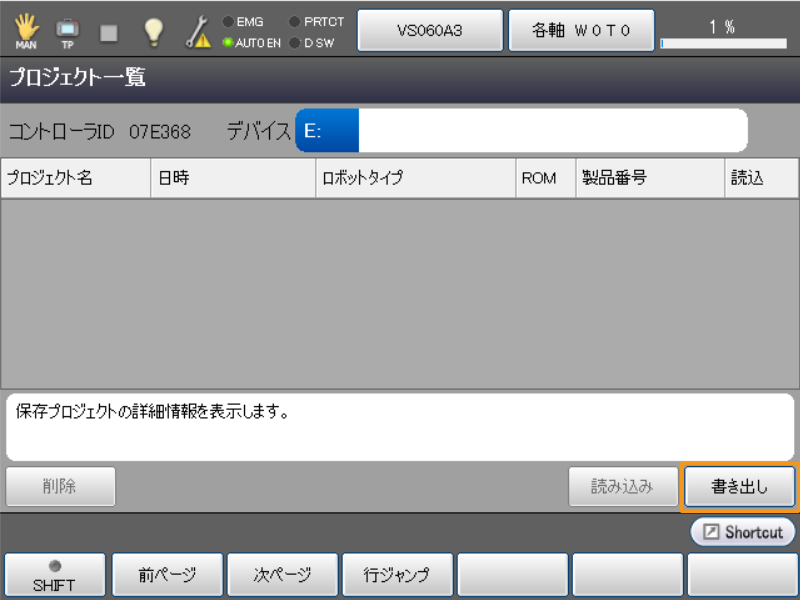
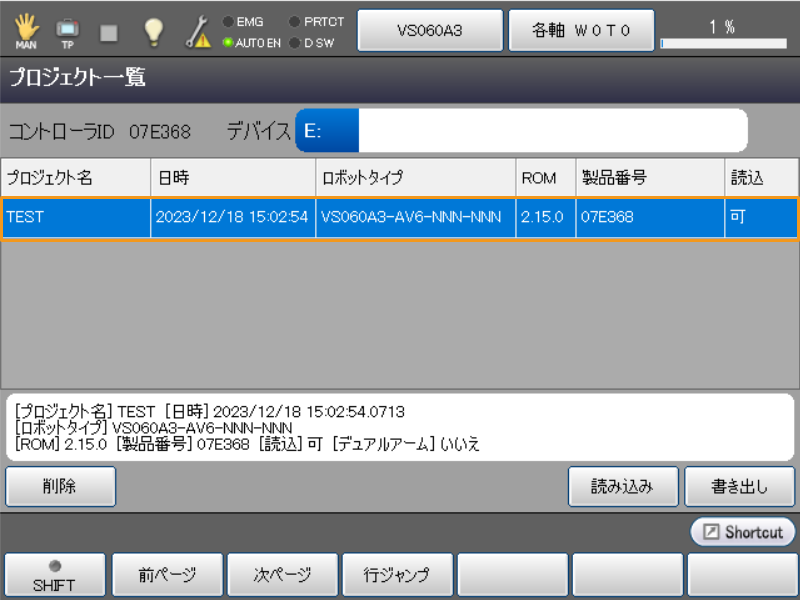
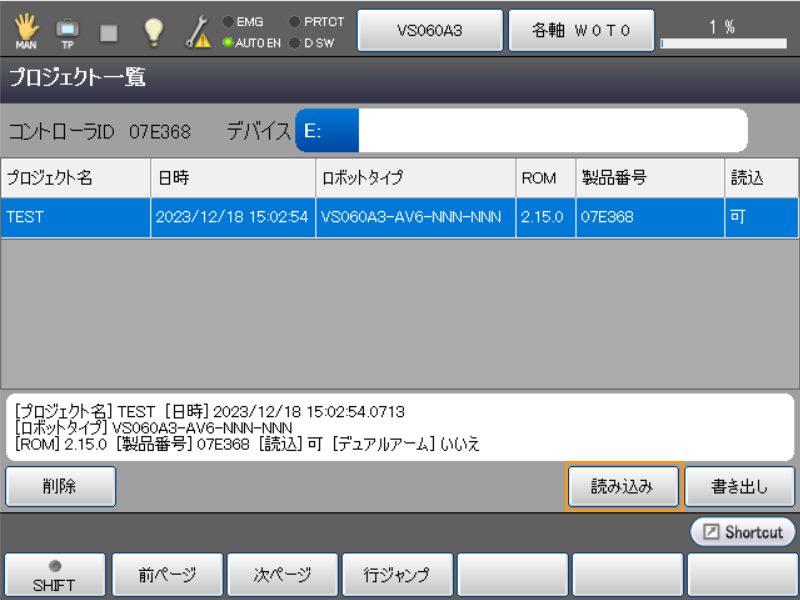
「プロジェクト一覧」画面で 書き出し を選択します。
-
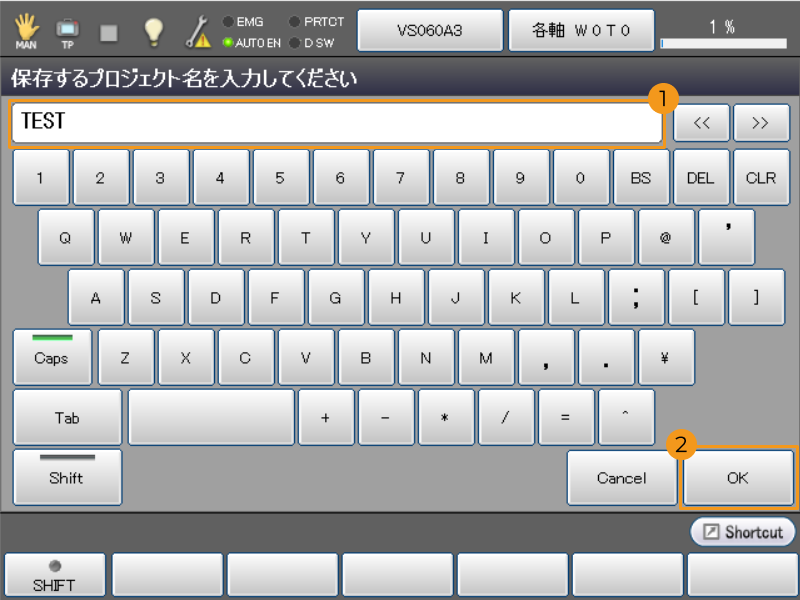
バックアップフォルダの名前を「保存するプロジェクト名を入力してください」の下にある入力ボックスに入力して OK をタッチます。
-
バックアップが完了すると、「プロジェクト一覧」がバックアップフォルダの情報が表示されます。プロジェクト名 は、前の手順で入力したバックアップフォルダの名前です。最後に、USBメモリを安全に取り外します。
「ロボット通信設定」を実行
-
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
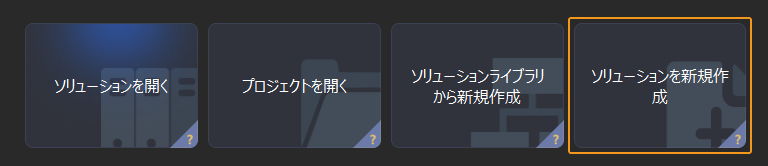
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
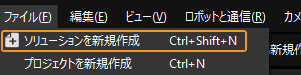
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 のドロップダウンボックスをクリックし、適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
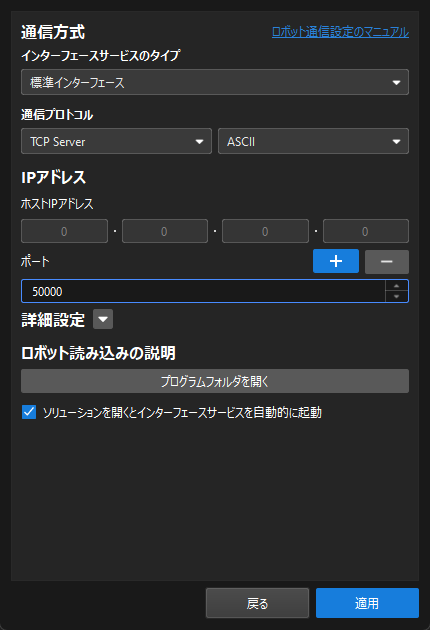
通信方式 の画面で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を ASCII に選択します。
-
ポート番号は50000または50000以上に設定することを推奨します。設定したポート番号が他のプログラムに使用されていないことを確認してください。
-
ロボット読み込みの説明 の下で、プログラムフォルダを開く をクリックします。
その後、読み込みファイルはこのフォルダからコピーされますので、フォルダウィンドウを閉じないようにしてください。 -
(オプション) ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-
-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
読み込みファイルの準備
-
USBメモリをIPCに挿入します。開いた読み込みプログラムフォルダ(
DENSOフォルダ)から、以下のファイルをコピーします。読み込みプログラムフォルダは、Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある
Communication Component/Robot_Interface/DENSOパス内でも見つけることができます。-
MM.h
-
MM_Auto_Calib.pcs
-
MM_Module.pcs
-
sample.pcs
-
-
USBメモリを開き、ロボットのバックアップフォルダから Source Files フォルダを検索します。読み込みファイルをこのフォルダに貼り付けます。最後に、USBメモリを安全に取り外します。
読み込みを実行
-
USBメモリをコントローラに差し込みます。
-
ティーチペンダントパネルの「プロジェクト一覧」画面で、読み込み をタッチします。
-
「プロジェクトデータ選択」画面が表示されますので、プログラム を選択して OK をタッチします。

-
「USB読み込み」ダイアログボックスが表示されますので OK をタッチします。

-
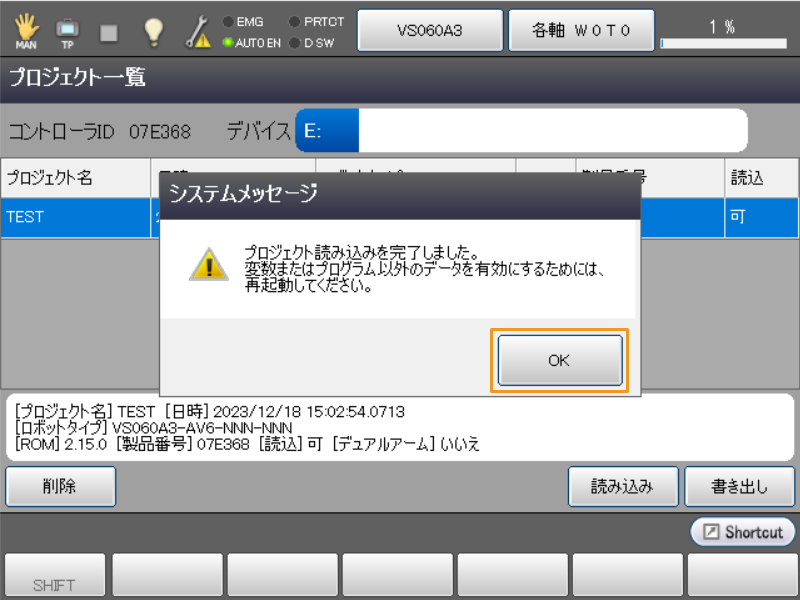
読み込みには時間がかかるため、しばらくお待ちください。システムの読み込みが完了すると、「システムメッセージ」のダイアログボックスが表示されます。OK をタッチします。
標準インターフェース通信をテスト
ロボットとビジョンシステム間の標準インターフェース通信をテストする場合、ロボット通信設定がオンになっている ことを確認してから、ティーチペンダントでテストプログラムを実行し、標準インターフェース通信が有効であるかを確認します。
-
ティーチペンダントのスイッチを回し、AUTO(自動モード) を指すようにします。

-
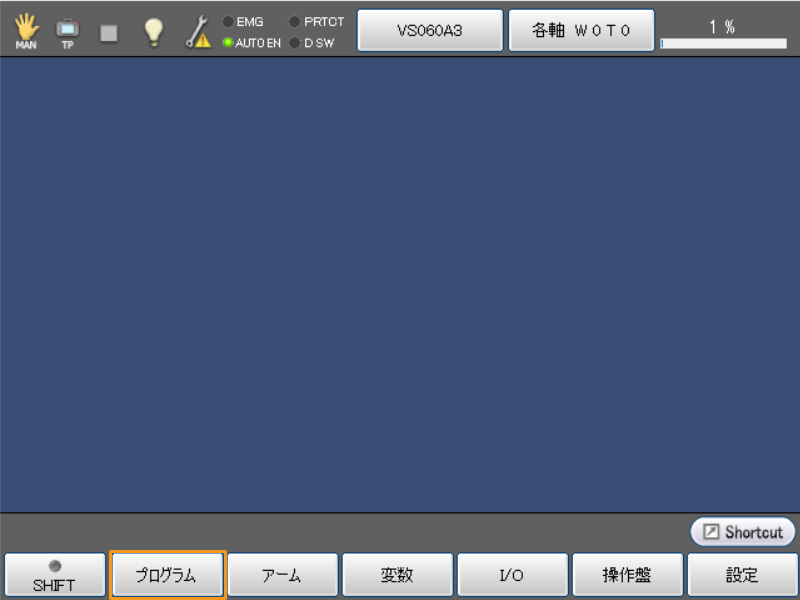
ティーチペンダントパネルの プログラム をタッチます。
-
プログラム一覧から sample.pcs プログラムを選択します。表示 をタッチます。

-
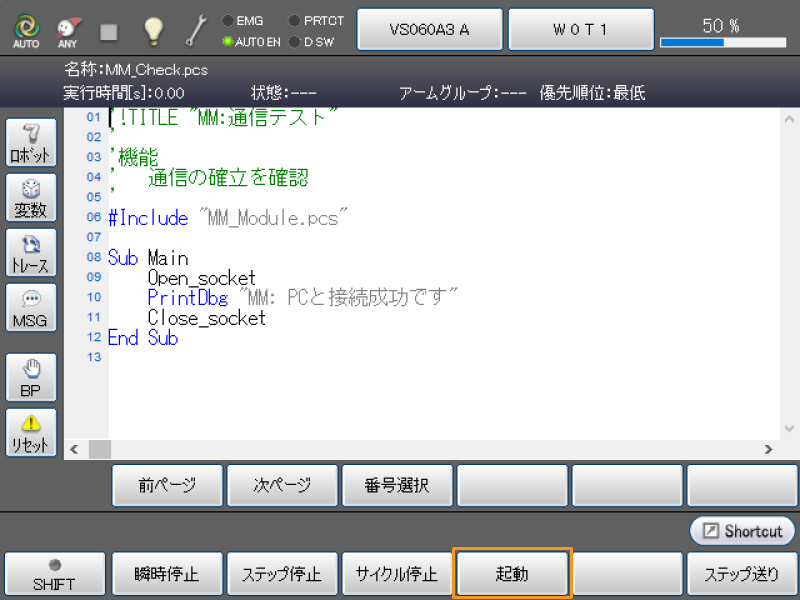
プログラム画面で 起動 をタッチします。
-
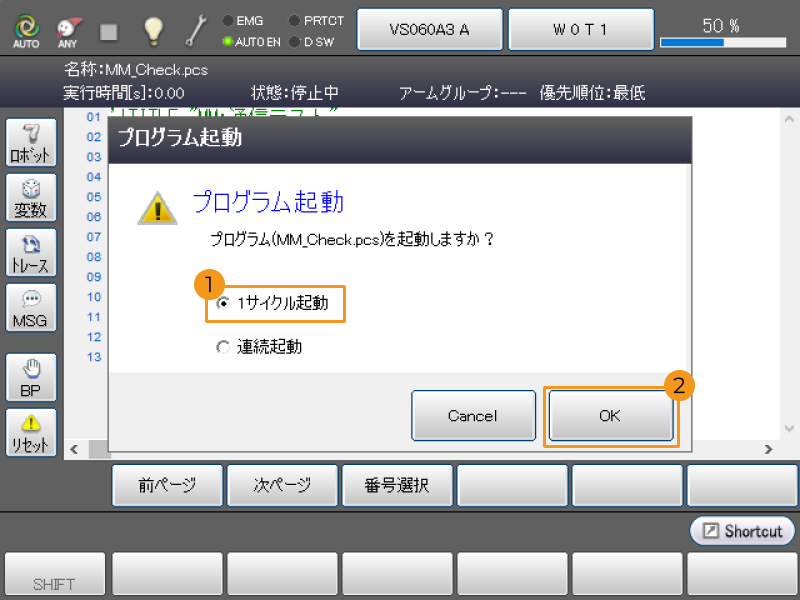
「プログラム起動」ダイアログボックスがポップアップされますので、サイクル起動 を選択して OK をタッチします。
-
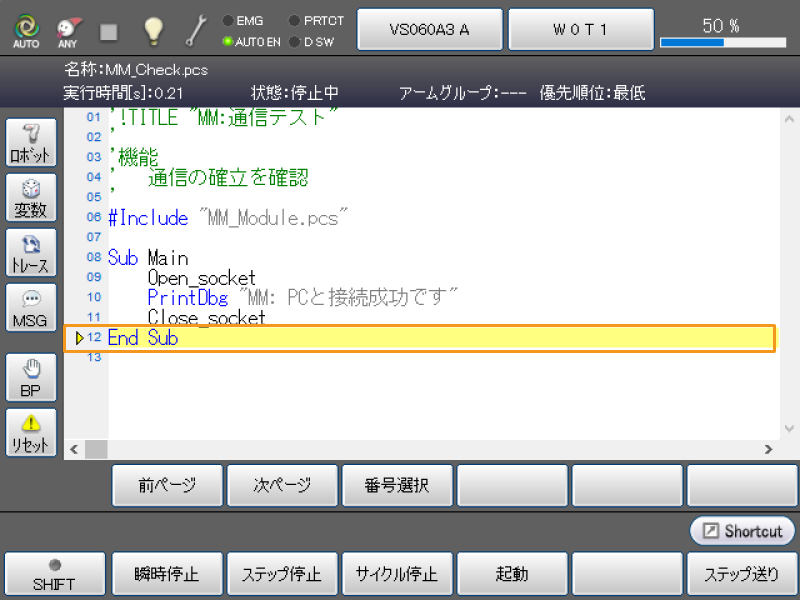
ロボットがMech-Visionとの標準インターフェース通信に成功すると、プログラムポインタは End Sub 行で停止します。
-
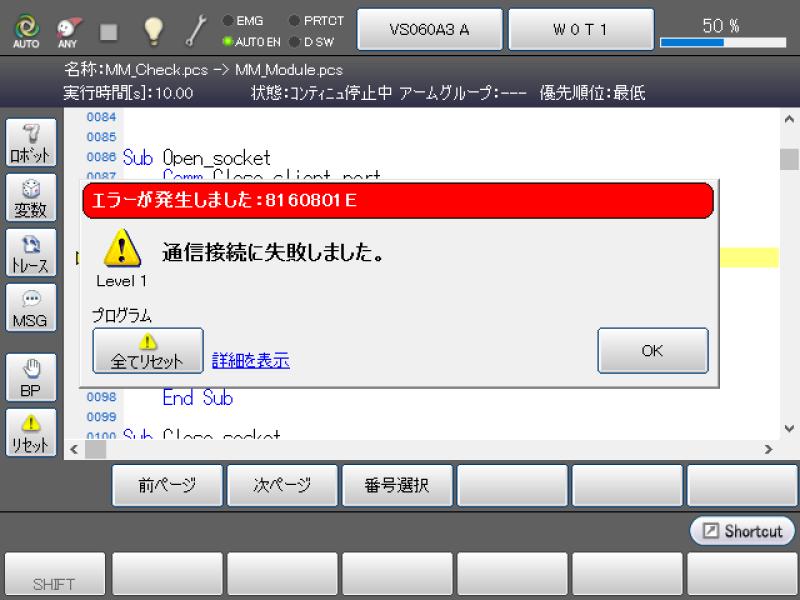
標準インターフェース通信が失敗すると、ティーチペンダントパネルに 通信接続に失敗しました というエラーメッセージが表示されます。通信の問題を解決するためにトラブルシューティングしてください。