レジスタの使用説明
PLCが使用するデータ型はMM_Interface構造体で、1528個のD レジスタを占有しています。この構造体変数のベースアドレスは、Mech-Visionで設定されているベースアドレスと同じにする必要があります。PLCと Mech-Vision の両方で使用するベースアドレスが10000の場合、各変数のレジスタアドレスは下図のようになります。
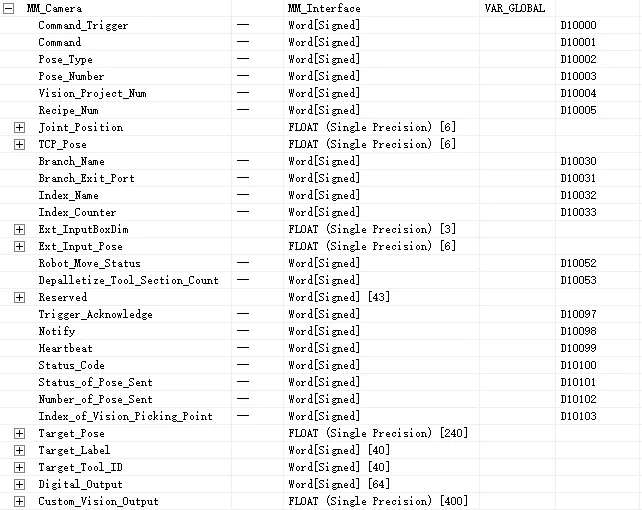
下表は、各変数のレジスタのベースアドレスに対するオフセットとその説明です。
| レジスタアドレスのオフセット | 名称 | データタイプ | 説明 |
|---|---|---|---|
0 |
Command_Trigger |
Word[符号付き] |
トリガー信号 |
1 |
Command |
Word[符号付き] |
送信コマンド |
2 |
Pose_Type |
Word[符号付き] |
位置姿勢のタイプ |
3 |
Pose_Number |
Word[符号付き] |
ビジョンポイントの期待数 |
4 |
Vision_Project_Num |
Word[符号付き] |
Mech-Visionプロジェクト番号 |
5 |
Recipe_Num |
Word[符号付き] |
Mech-Visionレシピ番号 |
6 |
Joint_Position |
Float[単精度][6] |
関節角度データ |
18 |
TCP_Pose |
Float[単精度][6] |
フランジ位置姿勢データ |
30 |
Branch_Name |
Word[符号付き] |
Mech-Vizの「メッセージによって異なる分岐を実行」ステップID |
31 |
Branch_Exit_Port |
Word[符号付き] |
Mech-Vizの「メッセージによって異なる分岐を実行」ステップの出口番号 |
32 |
Index_Name |
Word[符号付き] |
Mech-Vizのインデックス付きステップのステップID |
33 |
Index_Counter |
Word[符号付き] |
次にこのステップが実行されたときに設定されるべきインデックス値 |
34 |
Ext_InputBoxDim |
Float[単精度][3] |
Mech-Visionプロジェクトに入力される対象物寸法(長さ、幅、高さ、ミリメートル単位) |
40 |
Ext_Input_Pose |
Float[単精度][6] |
Mech-Vizプロジェクトに入力される外部TCPデータ |
52 |
Robot_Move_Status |
Word[符号付き] |
ロボットの動作状態 |
53 |
Depalletize_Tool_Section_Count |
Word[符号付き] |
吸盤のパーティション数 |
54 |
Reserved |
Word[符号付き][43] |
予約語 |
97 |
Trigger_Acknowledge |
Word[符号付き] |
実行確認 |
98 |
Notify |
Word[符号付き] |
カスタマイズされたメッセージ |
99 |
Heartbeat |
Word[符号付き] |
ハートビート |
100 |
Status_Code |
Word[符号付き] |
ステータスコード |
101 |
Status_of_Pose_Sent |
Word[符号付き] |
位置姿勢の送信状態 |
102 |
Number_of_Pose_Sent |
Word[符号付き] |
送信した位置姿勢の数 |
103 |
Index_of_Vision_Picking_Point |
Word[符号付き] |
「ビジョン処理による移動」の位置 |
104 |
Target_Pose |
Float[単精度][240] |
目標位置姿勢 |
584 |
Target_Label |
Word[符号付き][40] |
ラベル |
624 |
Target_Tool_ID |
Word[符号付き][40] |
ツールID |
664 |
Digital_Output |
Word[符号付き][40] |
デジタル出力信号 |