標準プログラムによる標準インターフェース通信
JAKAロボットの標準プログラムプラグインでる標準インターフェース通信のプログラムを作成する方法を説明します。以下のサンプルプログラムを簡単に修正すれば使用できます。本節で使用するサンプルグログラムは、ロボットコントローラーのバージョンを問わずに使用できます。
サンプルプログラムの読み込み
-
Mech-VisionとMech-Vizインストールパスの
Communication Component\Robot_Interface\JAKAフォルダを開き、mmCali.zip、mmVis.zip、mmVisPath.zip、mmViz.zipファイルをJAKA Zu APPがインストールされているコンピュータにコピーします。これからの手順でこれらのファイルを読み込みます。 -
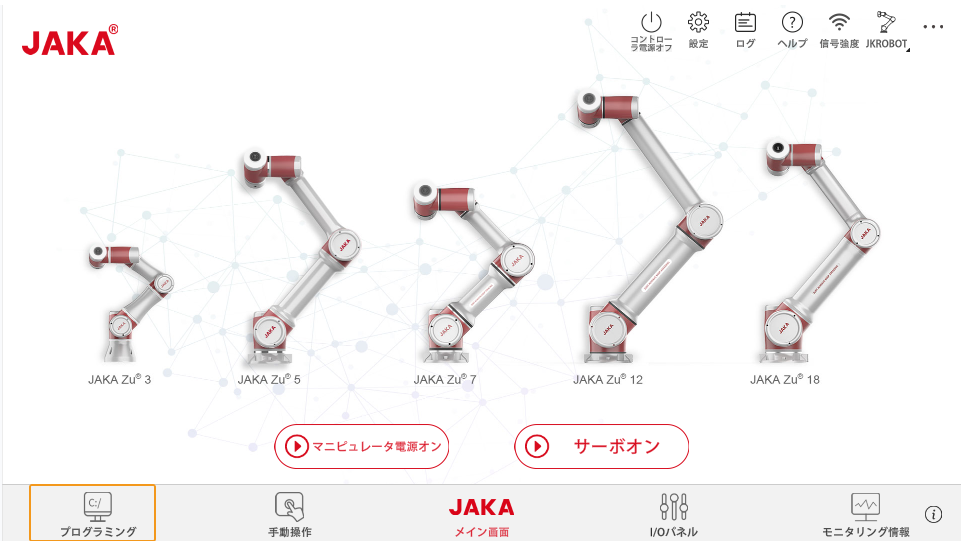
JAKAのメイン画面に戻り、左下の プログラミング をクリックします。
-
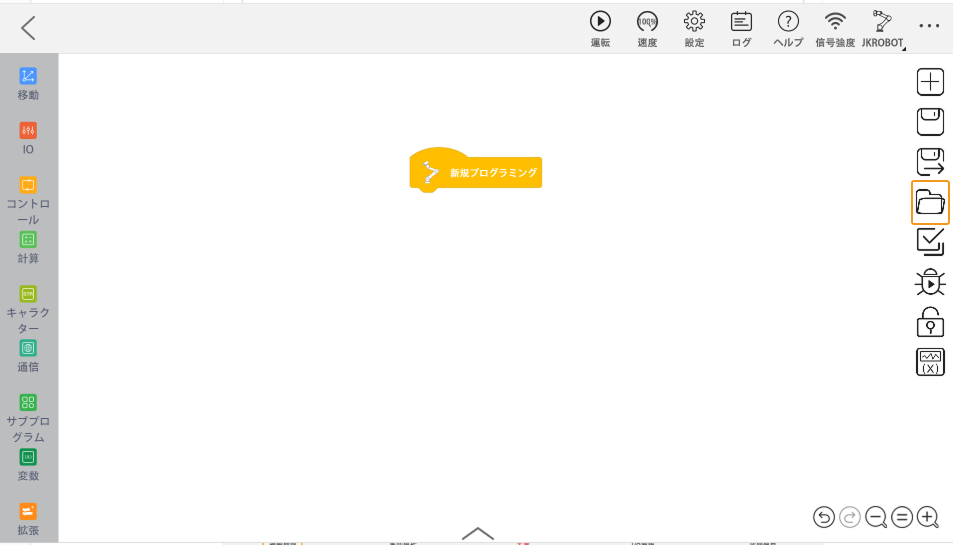
右の フォルダ アイコンをクリックしてフォルダを開きます。
-
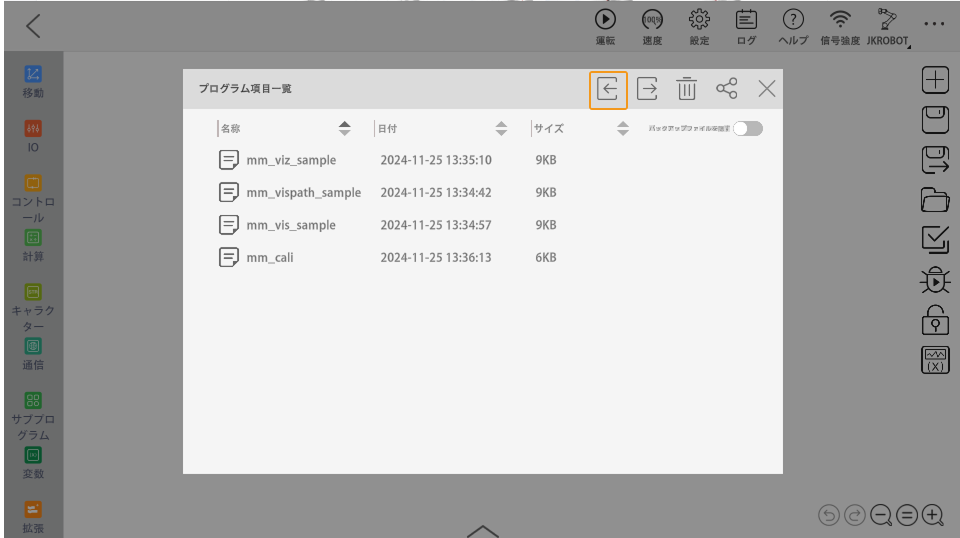
インポート をクリックします。
-
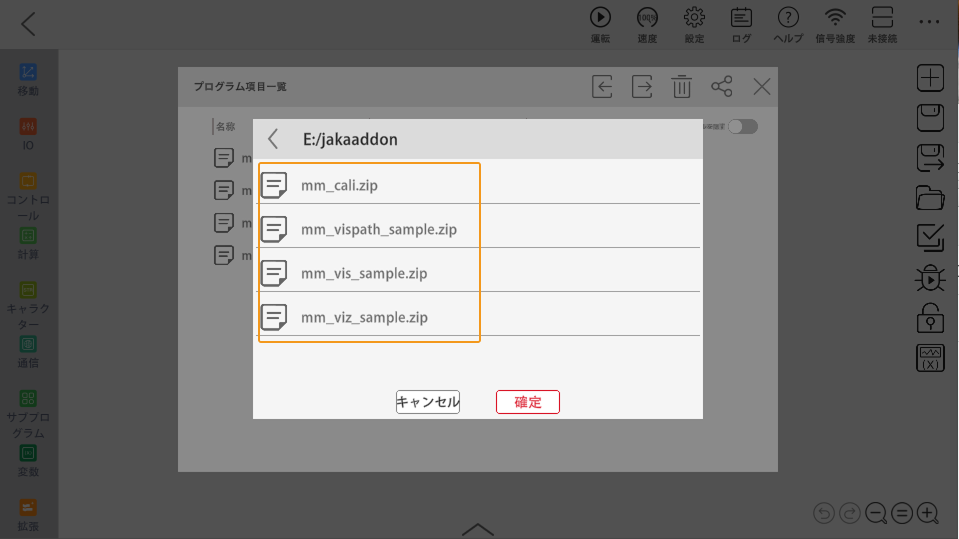
以下のファイルを選択して確認をクリックします。
Mech-Visionを実行して認識してからビジョン結果を取得
プログラミング 画面で、mmVisプログラムを開きます。
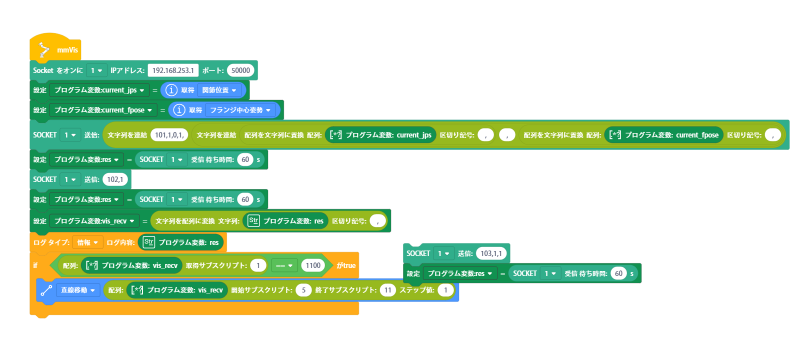
プログラム説明
-
手順1:ロボットとIPCのSocket通信を確立します。ここのIPアドレスは、IPCのIPアドレスで、ロボットIPアドレスと同じネットワークセグメントに設定する必要があります。
-
手順2:ロボットの現在の関節角度を取得し、変数current_jpsに保存します。
-
手順3:ロボットの現在のフランジ位置姿勢を取得し、変数current_fposeに保存します。
-
手順4:Mech-Visionプログラム実行のコマンドを送信します。パラメータの設定は、101コマンドをご参照ください。
-
手順5:101コマンドから返されたステータスコードを受信して変数resに保存します。
-
手順6:ビジョン結果受信のコマンドを送信します。パラメータの設定は、 102コマンドをご参照ください。
-
手順7:102コマンドから返されたデータを受信して変数resに保存します。
-
手順8:手順7で受信したデータを文字列の形式から配列に変換し、変数vis_recvに保存します。
-
手順9:ログを出力します。
-
手順10:vis_recvサブスクリプトが1の値が1100か確認します。1100であれば、正常にビジョン結果を取得したことになります。
-
手順11:直線運動で最初のビジョンポイントに到着します。
JAKAロボットの場合、直線運動のためにロボットハンド位置姿勢を、関節運動のためには関節角度を入力する必要があります。
Mech-Vizで経路を計画
プログラミング 画面で、mmVizプログラムを開きます。
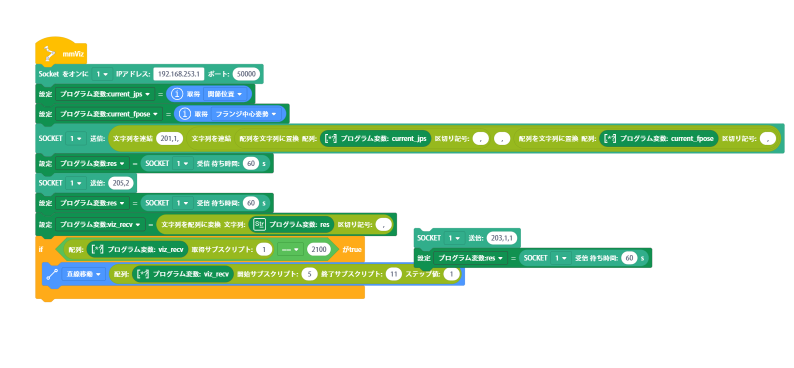
プログラム説明
-
手順1:ロボットとIPCのSocket通信を確立します。ここのIPアドレスは、IPCのIPアドレスで、ロボットIPアドレスと同じネットワークセグメントに設定する必要があります。
-
手順2:ロボットの現在の関節角度を取得し、変数current_jpsに保存します。
-
手順3:ロボットの現在のフランジ位置姿勢を取得し、変数current_fposeに保存します。
-
手順4:Mech-Vizプログラム実行のコマンドを送信します。パラメータの設定は、201コマンドをご参照ください。
-
手順5:201コマンドから返されたステータスコードを受信して変数resに保存します。
-
手順6:Mech-Vizが計画した経路を受信するコマンドを送信します。パラメータの設定は、205コマンドをご参照ください。
-
手順7:205コマンドから返されたデータを受信して変数resに保存します。
-
手順8:手順7で受信したデータを文字列の形式から配列に変換し、変数viz_recvに保存します。
-
手順9:viz_recvサブスクリプトが1の値が2100か確認します。2100であれば、正常にMech-Vizが計画した経路を取得したことになります。
-
手順10:直線運動で最初の経路点に到着します。
JAKAロボットの場合、直線運動のためにロボットハンド位置姿勢を、関節運動のためには関節角度を入力する必要があります。
Mech-Visionの「経路計画」ステップを使用して経路を取得
プログラミング 画面で、mmVisPathプログラムを開きます。
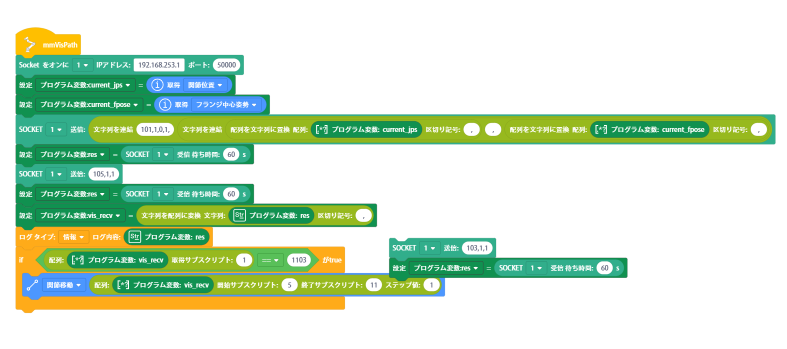
プログラム説明
-
手順1:ロボットとIPCのSocket通信を確立します。ここのIPアドレスは、IPCのIPアドレスで、ロボットIPアドレスと同じネットワークセグメントに設定する必要があります。
-
手順2:ロボットの現在の関節角度を取得し、変数current_jpsに保存します。
-
手順3:ロボットの現在のフランジ位置姿勢を取得し、変数current_fposeに保存します。
-
手順4:Mech-Visionプログラム実行のコマンドを送信します。パラメータの設定は、101コマンドをご参照ください。
-
手順5:101コマンドから返されたステータスコードを受信して変数resに保存します。
-
手順6:Mech-Visionが計画した経路を受信するコマンドを送信します。パラメータの設定は、105コマンドをご参照ください。
-
手順7:105コマンドから返されたデータを受信して変数resに保存します。
-
手順8:手順7で受信したデータを文字列の形式から配列に変換し、変数vis_recvに保存します。
-
手順9:ログを出力します。
-
手順10:vis_recvサブスクリプトが1の値が1103か確認します。1103であれば、正常にMech-Visionが計画した経路を取得したことになります。
-
手順11:直線運動で最初の経路点に到着します。
JAKAロボットの場合、直線運動のためにロボットハンド位置姿勢を、関節運動のためには関節角度を入力する必要があります。